图像识别技术与移动增强现实技术的结合
2017-03-22 23:15吴振宇
电子技术与软件工程 2017年3期
关键词:结合
摘 要增强现实技术是当前发展最为迅速,同时也最具潜力的领域之一,其本身在许多方面都表现出了良好的优越性,尤其是伴随着移动智能终端的发展和普及,移动增强现实技术逐渐产生,为技术的发展揭开了新的一页。本文以提升移动增强现实技术应对大规模复杂场景的能力着手,结合图像识别技术,设计出了相应的移动增强现实系统,希望能够满足实际应用需求。
【关键词】图像识别技术 移动增强现实技术 结合
移动互联网技术的飞速发展,使得移动增强现实技术(MAR)受到了越来越多的关注,在实际应用中的关键技术包括了交互技术、显示技术以及跟踪定位技术等。在长期的发展中,对于相关算法的研究多集中在室内环境,对于室外的复杂场景适应性不足,无法完成大规模图像的实时跟踪注册。对此,本文提出了基于图像识别技术的MAR系统。
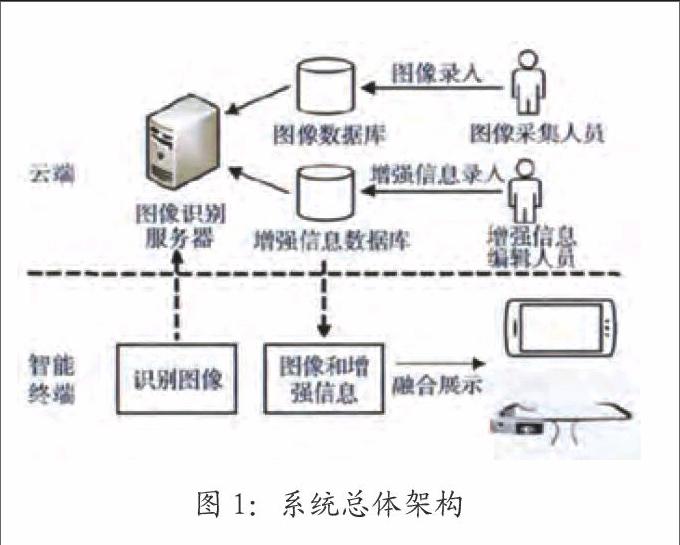
1 系统总体架构
MAR系统采用了C/S架构,可以实现对于场景图像、增强信息以及人员的管理,其中数据管理主要是利用管理系统,建立起相应的场景图像数据库和增强信息数据库,对相应的数据信息进行存储,同时建立索引,以方便用户进行信息的检索;人员管理主要是针对图像采集人员和采编人员的管理,采编人员需要将采集到的图像以及与之关联的增强信息输入到数据库中。结合云端的存储功能和计算能力,系统可以完成对于样本的训练以及图像的快速识别。系统总体架构如图1所示。
2 基于图像识别的跟踪注册算法
2.1 改进特征描述算法
在室外场景中,存在着大量结构类似的建筑工程,受其影响,如果使用BRISK或者SURF等算法进行图像特征匹配,并不能取得预期的效果,对此,相关研究人员提出了以重力方向解决相似特征的误匹配问题,并且取得了显著的成果。假定存在有四个特征点,其通过邻域像素灰度信息计算特征点主方向,而且仅仅相差一个旋转角度,如果特征点邻域旋转到主方向,计算出的特征描述将会变得缺乏典型性和区分性。而如果利用重力传感器信心,在BRISK或者SURF算法的特征描述中加入重力信息,可以生成Gravity-BRISK和Gravity-SURF描述,使得四个特征点的描述差异更加显著。
2.2 大规模图像识别技术
当前,许多基于图像检索的场景识别算法,如随机树、BOF等,都存在着计算量大、内存消耗大的问题,对此,系统在对大规模图像识别算法进行选择时,引入了VLAD算法,能够在一定程度上解决内存占用问题,以Gravity-SURF对图像特征进行描述,也可以实现对于相似图像特征的有效区分,提升场景识别的准确性和可靠性。在系统运行中,识别算法需要首先针对云端图像数据库中存在的训练图像的Gravity-SURF描述进行提取,做好VLAD编码处理,得到图像的VLAD聚合量。在针对图像进行在线识别时,算法能够对AR(增强现实技术)上传的查询图像的VLAD聚合向量进行提取,与训练图像本身的聚合向量进行对比,通过相似度测量来保证识别结果的准确性。
2.3 视觉跟踪注册算法
在自服务器中获取识别图像的编号后,MAR系统可以针对图像进行跟踪注册,以完成对三维模型的实时渲染。从确保实时性的层面考虑,可以选择BRISK算法,构建Gravity-BRISK描述。在实际应用中,算法会对关键帧进行训练,得到特征集,在跟踪初始化环节,算法能够获取相应的实时帧图像,将其与关键帧特征匹配集合结合起来,运用PROSAC算法,可以取种其中存在的误匹配点。为了提升跟踪注册算法的实时性和鲁棒性,可以利用金字塔L-K光流跟踪的方式,完成对于特征点的准确匹配。
在光流跟踪阶段,如果摄像机本身的运动速度过快,则由估算得到了特征点坐标会存在较大的误差,算法会自动将这些特征点剔除来保证良好的效果。同样,当摄像机本身的角度不合理、出现遮挡或者光照变化时,系统同样会剔除相应的特征点,這样必然会导致特征点数量的减少,影响跟踪的稳定性。针对这个问题,需要做好系统设定,当跟踪点的数量小于一定数值时,系统初始化,然后重新进行特征点匹配。
2.4 三维渲染
在场景中,以Unity3D渲染引擎进行三维模型的绘制,以实现虚拟场景与现实场景的融合显示。不过,考虑到Unity3D渲染引擎与摄像机使用的均为左手坐标系,本身提到的摄像机坐标系和由跟踪注册算法定义的世界坐标系为右手坐标系,需要进行坐标系的转换工作。这里在右手坐标系中,选择特征点,坐标为Pwr(x,y,z)、Pcr(x,y,z),对应的左手坐标系特征点坐标为Pwl(x,y,z)以及Pcl(x,y,z),坐标转换关系为:
Pcr=RrPwr+Tr,Pcl=RlPwl+Tl
Pcl=APcr,Pwl=APwr
其中,Rr、Rl表示旋转矩阵,Tr、Tl表示平移矩阵,A=diag(1,-1,1)。结合上述公式,经计算,可以得到Unity3D渲染引擎中摄像机的旋转矩阵和平移矩阵,有
RUnity3D=Rl-1
TUnity3D=-Rl-1Tl
其中,Rl=ARrA,Tl=ATr。
3 结语
经测试,本文提出的算法可以满足系统对于实时性和精度等方面的要求,而且基于云端的增强现实系统可以在多个领域中得到应用,能够发挥出良好的效果。
参考文献
[1]吕强,黄成,刘明.移动云计算——移动增强现实技术和服务[J].中兴通讯技术,2015(02):25-29.
[2]申威.基于图像识别的增强现实系统的实现[D].北京邮电大学,2013.
[3]严雷,杨晓刚,郭鸿飞,陈靖.结合图像识别的移动增强现实系统设计与应用[J].中国图象图形学报,2016,21(02):184-191.
作者简介
吴振宇(1980-),男,浙江省义乌市人。大学学历。现为浙江交通技师学院讲师。研究方向为计算机教学研究。
作者单位
浙江交通技师学院 浙江省金华市 321015
猜你喜欢
商情(2016年40期)2016-11-28
人间(2016年24期)2016-11-23
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
启迪与智慧·教育版(2016年8期)2016-10-20