煮糖结晶过程数据驱动控制方法
2017-03-21 08:02蒙艳玫谢延鹏郑康元
江苏农业科学 2016年11期
关键词:仿真
蒙艳玫+谢延鹏+郑康元

摘要:煮糖结晶过程是蔗糖生产行业唯一没有实现全自动化的工序,由于该过程存在大时滞、非线性的特点,目前的研究尚难以从机理模型方向对煮糖结晶过程进行控制。针对煮糖结晶过程尚未实现全自动化的问题,研究基于紧格式动态线性化的无模型自适应数据驱动控制方法。结合煮糖结晶过程控制的实际要求,对数据驱动控制系统框架进行设计与实现。利用紧格式动态线性化方法构建动态线性化模型,将非线性系统线性化。实现无模型自适应控制和预测控制的融合,既保留了无模型自适应控制单调收敛性和有界输入输出稳定性的显著特点,又加入预测控制方法控制效果好、鲁棒性强的优点。与比例-积分-导数(proportion-integral-derivate,简称PID)控制方法的仿真对比分析表明,所用方法取得了更好的控制效果,验证了基于紧格式动态线性化的无模型自适应数据驱动方法的有效性和优越性。
关键词:煮糖结晶;过程数据;紧格式动态线性化;无模型自适应控制;预测控制;仿真
中图分类号:S126 文献标志码: A
文章编号:1002-1302(2016)11-0405-03
煮糖结晶过程的数据驱动控制是指仅根据煮糖系统结晶过程中产生的离线或在线输入输出数据(输入数据主要为物料流量或物料阀门开度,输出数据主要为糖膏锤度、液位、温度或糖液过饱和度)设计控制器,设计的控制器不显含或隐藏煮糖结晶系统的机理模型信息,而且能够保障系统的收敛性、稳定性和鲁棒性。由此可见,基于数据驱动的煮糖结晶过程控制方法摆脱了传统控制器设计对煮糖结晶过程机理模型的依赖,避免了传统控制器在机理模型复杂的情况下存在的鲁棒性、可靠性等问题 。
公开文献报道的数据驱动控制方法主要有侯忠生于1994年提出的无模型自适应控制(model free adaptive control,简称MFAC)法[1-4]、Spall于1992年提出的同步扰动随机逼近(simultaneous perturbation stochastic approximation,简称SPSA)法[5]、Uchiyama于1978年提出的迭代学习控制(iterative learning control,简称ILC)法[6]、George等于1995年提出的去伪控制(unfasified control,简称UC)法[7]、Hjamarsson等于1994年提出的迭代反馈整定(iterative feedback tuning,简称IFT)法[8]、应用于控制领域的懒惰学习(lazy learning,简称LL)控制方法[9]以及广泛应用于工业过程中的PID控制方法[10]。其中,SPSA方法虽然能够实现自适应调节,但其适应性易受系统结构或参数变化的影响,而且与UC、IFT、比例-积分-导数(proportion-integral-derivate,简称PID)法一样,这些方法都需要提前确定控制器结构,而MFAC、ILC、LL则不需要事前确定。虽然MFAC、LL方法采用相同的动态线性化原理,但是LL没有系统化的控制理论分析体系。MFAC法和ILC法类似,有1套完善的系统分析框架,但MFAC方法由于计算负担小、易于实现和鲁棒性较强的特点,特别是它可保证闭环系统跟踪误差的单调收敛性和有界输入输出稳定性,使得这种基于数据驱动的控制方法在煮糖结晶过程领域具有巨大的发展潜力。因此,基于MFAC单调收敛性和有界输入输出稳定性的显著特点,本研究应用MFAC这种数据驱动的控制方法研究煮糖结晶过程的控制。
1 总体方案设计
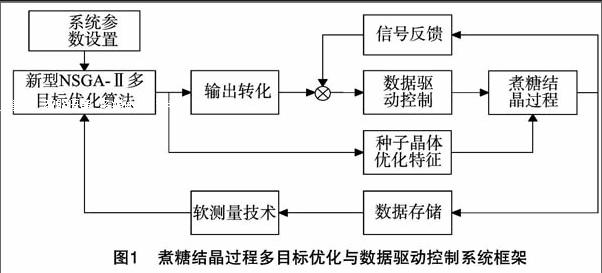
煮糖结晶过程数据驱动控制系统框架如图1所示,其实现的基本思想主要分为离线部分、在线部分。关于总体方案的具体介绍如下。
(1)离线部分。包括参数设置模块、新型NSGA-Ⅱ多目标优化算法模块、软测量技术模块、数据存储模块、输出转化模块和种子晶体优化特征模块。首先,软测量技术模块从数据存储模块中获取存储的有关煮糖结晶过程的历史数据,再计算出不可测量变量,即糖液过饱和度、糖液纯度和晶体体积;然后,新型NSGA-Ⅱ多目标优化算法模块从软测量技术模块获取所需有关参数,再进行优化,将过程优化变量传输给种子晶体优化特征模块,为煮糖结晶过程实施在線操作部分作准备。
(2)在线部分。包括数据驱动控制模块、煮糖结晶过程模块、信号反馈模块和数据存储模块。在线过程实施的第1步为根据获取的种子晶体优化特征指导投种或抽种过程的优化操作;随后,数据驱动控制模块根据输出转化模块的参考目标信号、信号反馈模块的反馈信号实施控制策略,并将产生的输入信号作用于煮糖结晶过程模块,再通过信号反馈实现煮糖结晶过程的闭环自适应控制。
2 煮糖结晶过程无模型自适应预测控制方法
2.1 紧格式动态线性化方法
煮糖结晶过程是个大时滞、强耦合、非线性的系统。线性化方法是处理非线性系统的常见做法,其主要目的是为了简化控制器的设计过程。紧格式动态线性化方法(compact form dynamic linearization,简称CFDL)具有结构简单、输入输出数据可直接利用的特点[11-13],本研究选择该方法构建煮糖结晶过程的动态线性化模型。
由文献[11]可知,对于单输入单输出离线非线性系统,紧格式动态线性化模型建立的条件如下:
通过对CFDL-MFAPC和传统的PID控制方法的仿真结果分析可知:2种控制方法在跟踪期望输出信号的控制过程中,都表现了良好的跟踪性能(图2~图5);但是根据其对应的控制输出误差变化情况可知,CFDL-MFAPC控制方法的控制误差最小,而且趋近零误差的速度比PID控制方法都要快。此外,其控制过程的误差跳变也很小,这充分说明 CFDL-MFAPC 相对PID具有更好的快速反应能力和收敛性,显示其具有更好的优越性。同时,PID算法的控制效果对参数变化非常敏感,很容易出现失调,参数调整过程非常不方便。而CFDL-MFAPC的参数调整过程比PID控制算法更加方便,在其可调参数中,基本上只需要调节λ参数,λ参数的调节变化对最后的控制效果影响没有PID算法敏感。因此,CFDL-MFAPC控制算法具有更宽、更灵活的参数可调性。
综上所述,采用基于CFDL-MFAPC的煮糖结晶过程优化与控制方法在仿真过程中,相对传统PID控制方法控制效果更好,说明CFDL-MFAPC控制方法的有效性、优越性。
4 结论
针对目前尚无解决煮糖过程多目标优化和协同控制的有效算法的问题,本研究采用基于CFDL-MFAPC的数据驱动控制方法,构建煮糖结晶过程的数据驱动控制系统,设计总体方案,并详细研究基于数据驱动的CFDL-MFAPC控制方法。利用紧格式动态线性化模型实现线性化处理,结合无模型自适应控制与预测控制,完成煮糖结晶过程多目标优化与控制方法的融合实现。通过仿真对比分析,验证了基于CFDL-MFAPC的数据驱动控制方法的有效性、优越性。
参考文献:
[1]侯忠生. 非线性系统参数辨识、自适应控制和无模型学习自适应控制[D]. 沈阳:东北大学,1994.
[2]侯忠生. 非参数模型及其自适应控制理论[M]. 北京:科学出版社,1999.
[3]Hou Z S,Jin S T. A novel data-driven control approach for a class of discrete-time nonlinear systems[J]. IEEE Transactions on Control Systems Technology,2011,19(6):1549-1558.
[4]Hou Z,Jin S T. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems[J]. IEEE Transactions on Neural Networks,2011,22(12):2173-2188.
[5]Spall J C. Multivariate stochastic approximation using a simultaneous perturbation gradient approximation[J]. IEEE Transactions on Automatic Control,1992,37(3):332-341.
[6]Uchiyama M. Formulation of high-speed motion pattern of amechanical arm by trial[J]. Transactions of the Society of Instrument and Control Engineers,1978,14(6):706-712.
[7]George Z,Bruce A F,Allen T. Feedback control,nonlinear systems and complexity[M]. Heidelberg:Springer-Verlag,1995:196-214.
[8]Hjamarsson H,Gunnarsson S,Gervers M. A convergent iterative restricted complexity control design scheme[C]. Lake Buena Vista:Proceedings of the 33rd IEEE Conference on Decision and Control,1994:1735-1740.
[9]]Schaal S,Atkeson C G. Robot juggling:implementation of memory-based learning[J]. IEEE Control Systems Magazine,1994,14(1):57-71.
[10]Silva G J,Datta A,Bhattacharyya S P. New results on the synthesis of PID contrllers[J]. IEEE Transactions on Automatic Control,2002,47(2):241-252.
[11]侯忠生,金尚泰. 無模型自适应控制:理论与应用[M]. 北京:科学出版社,2013.
[12]侯忠生,徐建新. 数据驱动控制理论及方法的回归和展望[J]. 自动化学报,2009,35(6):650-667.
[13]Xu J X,Hou Z S. Note on data-driven system approaches[J]. Acta Automatica Sinica,2009,35(6):668-675.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15