
2017年路虎发现5新技术剖析(五)
2017-03-17 02:24辽宁陈东波
汽车维修技师 2017年10期
辽宁/陈东波
四、电气系统
(一)通信通道
为了让All-New Discovery 与其他Land Rover 产品保持一致,已修改了车辆的通信网络。中速和高速CAN 被替换为高速CAN 网络结构。作为首次引入Land Rover 产品的功能,此网络结构还配备了超高速Flex Ray 通信通道。
网络按如下划分:
◆车身HS CAN:所有模块均采用了高速版本以提高带宽,从而为全新的车身功能提供支持
◆底盘HS CAN:包含了提供底盘/车辆动力以及驾驶员辅助系统和安全功能的所有模块
◆舒适HS CAN:为舒适度和控制、信息娱乐以及驾驶员信息功能提供支持的主通信功能
◆电源模式0 HS:这是一套电源管理网络,可在车辆钥匙处于关闭位置时为需要通信的车辆交互功能提供支持(电源模式0 通信)
◆动力传动系统HS CAN:支持通过先前的网络架构设计为无法迁移到Flex Ray 网络的模块提供通信
◆Flex Ray:全新的总线布局,动力传动系统已从先前的PT-CAN 网络进行迁移,以便提高通信能力
1.网关模块

1.CAN 总线连接 2.BCM/GWM 3.以太网连接 4.CAN总线(电源模式0) 5.诊断插座
56 信号传输
网络架构还将网关模块(如图55所示)和车身控制模块整合到了一个模块中。诊断插座仍然直接连接到网关模块,但连接技术得到了增强。现在安装了使用以太网连接将诊断设备连接到车辆的装置,而不是通过CAN总线连接将诊断设备连接到车辆。
2.CAN总线
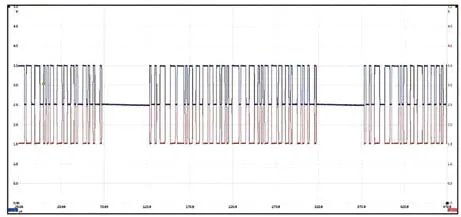
在了解Flex Ray 概念之前,我们首先来回顾下高速CAN总线网络的工作方式。CAN 总线提供了一个通信网络,允许电子控制模块交换数据。CAN总线网络被分类为多主网络,即连接到网络的所有模块均具有同等的权限来传输消息。除了可传输周期性(定期传输)消息外,总线还允许实施事件驱动的通信策略,因此,每个模块必须能够随时访问总线。总线在任意指定时间只可传输一条消息,因此,为了让网络正常运转,将使用一组规则(仲裁)来将数据或消息传输到网络中,所有模块必须遵守这些规则以准确发送和接收消息,如图56所示。
(1)CAN 消息结构(如图57所示)
使用定义的字段结构来传输数字化消息:

图55 网关模块
①开始字段——指明新消息的开端
②标识符字段——消息信息/内容和优先级
③控制字段——消息中包含的数据量
④数据字段——数据或消息
⑤循环冗余检查(CRC)字段——一个计算值,用于验证是否已接收正确的数据量

图57 消息结构图
⑥确认字段——由任意接收模块填写,以向发送方表明是否已成功投递消息
⑦时间范围结束——表明现在可以发送下一条消息
消息结构包含检查字段,但只有在发送消息后才可以检测到传输故障,因此网络必须处于活动状态才能确定传输问题是否存在。仲裁描述了消息的发送顺序,模块必须耐心等待自己的消息获得最高优先级,然后它们才可拥有用于传输数据的总线的独家访问权限。尽管该系统在过往早已被证实无比可靠,但CAN 总线网络并未被分类为容错网络,不保证可以在特定时间范围内投递消息或传输的数据不会发生损坏。包含损坏数据的传输实际上会拖慢总线活动,因为必须重复传输过程。
(2)CAN总线总结
◆CAN总线采用了多主原则
◆通信通道允许传输周期性消息和由事件驱动的消息
◆在任意时刻,仅可通过总线传输一条消息
◆使用了仲裁协议来管理任意消息的传输
◆使用了一系列定义的字段来结构化每条消息
◆通信通道并不具备容错特性
◆不保证可以在特定时间范围内传输消息
◆损坏的数据可能会影响总线的运行速度
3.Fle xRay
All-New Discovery 的通信网络是首款采用Flex Ray 通信协议的Land Rover 产品,如图58所示。Flex Ray 是一套串行通信系统,适合在管理安全关键型车辆系统的模块之间交换数据。它提供了可容错的实时通信通道,其工作速度高达10Mbit/s。总线架构由一对扭结电线(正极总线和负极总线)构成,电路使用了端接电阻器。其数据传输方法与CAN 总线类似,其中,通过同时改变两根电线上的电压来制造电压差,从而创建数字逻辑“1”或“0”。Flex Ray传输还需遵循一组规则,这些规则定义了Flex Ray 协议,以及用于实现高速数据传输的方法。Flex Ray 拓扑主要被排列成“星形”配置。所有模块均包含一个通往中央BCM/GWM 模块的专用分支。此配置的优势是,如果一条分支故障,且与一个模块之间失去通信,则其他模块可以继续进行相互通信。注意: 车辆配备分动箱控制模块(TCCM)时,可修改配置。
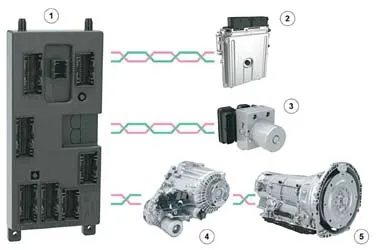
图58 通信模块连接
Flex Ray总结
◆Flex Ray 的工作速度高达10Mbit/s◆总线由一对扭结电线构成
◆使用电压差来传输数据
◆使用Flex Ray 协议来管理数据传输
◆星形配置提供了强大的网络结构
4. Flex Ray传输协议(如图59所示)Flex Ray使用了时分多址(TDMA)法,而非多主概念。不允许模块按照随机或基于事件的顺序访问通信总线,它们仅可按照精确定义的、时长相等的时隙计划传输数据。
每个通信周期包含以下字段:
◆静态分段——划分为同等时长的时隙以传输静态数据
◆动态分段——划分为同等时长的时隙以传输基于事件的数据
◆符号窗口——可用于网络维护
◆网络闲置时间——用于同步所有网络模块
为了流畅传输或接收数据,所有Flex Ray 模块必须同步到相同的时钟。将传输起始时间范围,以便为所有模块建立时钟时间。在通信周期内,网络闲置时间将使模块有机会重新同步/调整它们各自的时间基础设置。由于时间将在整个网络操作期间保持一致,Flex Ray能够确保投递到该网络上的模块的数据一致性。因此,作为此特性带来的优势,所有Flex Ray 模块可以接收到最新或接近实时的传输数据。
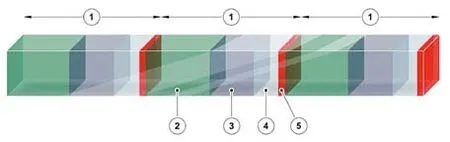
图59 FLex Ray传输
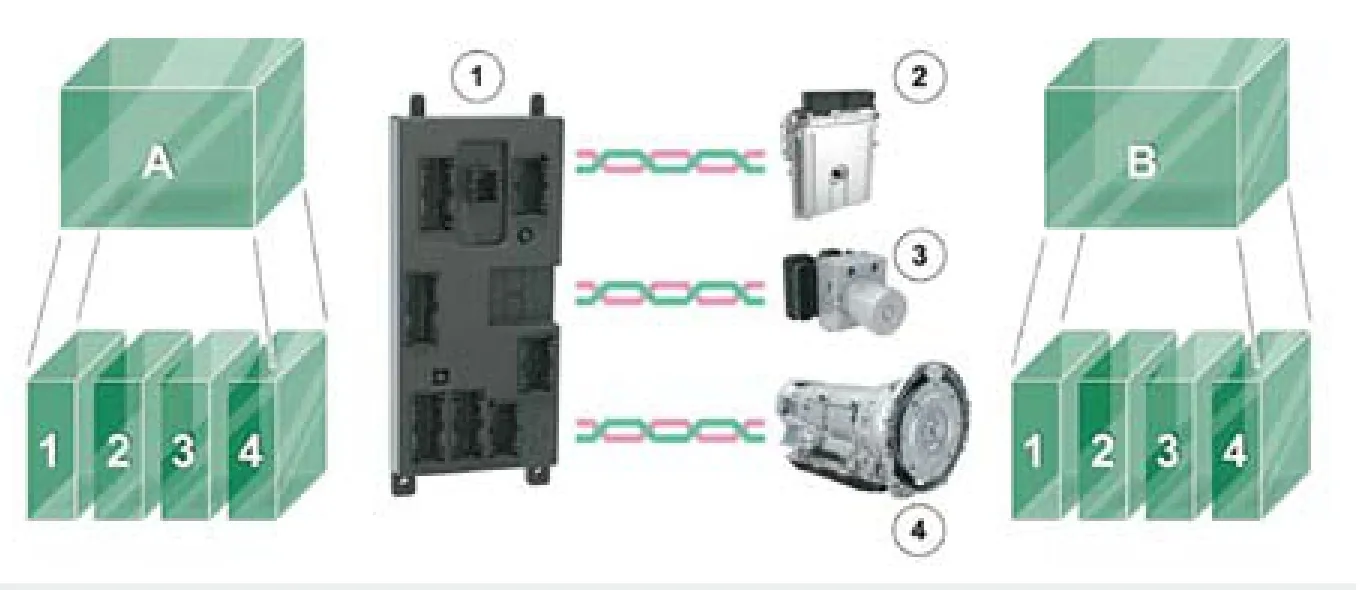
A.通信周期1 B.通信周期2 1.时隙1(BCM/GWM) 2.时隙2(PCM) 3.时隙3(ABS) 4.时隙4(TCM)
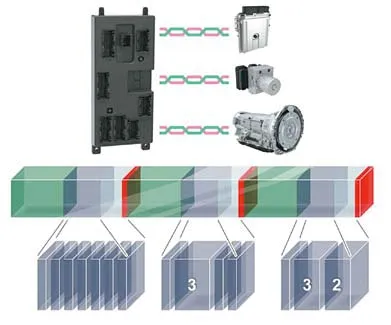
图61 动态分段
(1)传输总结
◆Flex Ray 不使用多主概念
◆模块根据基于时间的计划传输数据
◆所有Flex Ray 模块同步到相同的时钟时间
◆Flex Ray 模块可接收到最新的传输数据
(2)静态分段(如图60所示)
网络设计者将确定所有Flex Ray 模块的通信顺序。确定顺序后,每个模块将被分配一个特定的时隙。模块在通信周期内等待其特定的时隙来临,然后可以获得用于传输数据的总线的独家访问权限。如果模块离线或未准备好传输数据,则分配的时隙将保持空白。该模块必须等到下一个通信周期才能传输数据。使用TDMA 法时,通过静态分段来传输周期性数据。此数据是既定的系统的动态变量的值并非随机,它们将始终按照可预测的方式对指定时刻施加在该系统上的力做出反应。使用车轮转速作为变量示例。无论是静止还是移动,车辆将始终具备车轮转速(既定)。将使用车轮转速值来影响其他大量车辆系统,因此会把此信息反复传输到总线上。将定期传输消息“车速为x km/h”,因为只有变量“x”或实际车速会发生改变。使用TDMA 法后,便无须进行消息仲裁,现在将在可预测的时间范围内传输数据。该示例显示了4个时隙,在现实中,每个通信周期可能包含数十个时隙,通信通道可以在每个通信周期传输大量数据。
(3)静态分段总结
◆Flex Ray模块按照网络设计的顺序/计划传输数据
◆每个模块使用特定的时隙传输数据
◆每个时隙允许模块获得总线的独家访问权限
◆静态时隙允许传输既定数据
◆每个通信周期可以传输来自所有已连接模块的静态数据
(4)动态分段(如图61所示)
TDMA 功能足以完成静态消息传输,但几乎无法支持由事件驱动的消息传输(动态消息传输)。为实现此功能,Flex Ray 提供了相应选项,以通过动态分段扩展每个通信周期。动态消息示例已踩下制动踏板。动态分段具有固定的时长,分为一系列细微时隙。这些细微时隙按优先级顺序排列,最接近时间范围起始点的细微时隙负责传输最高优先级的消息。固定分段长度可确保静态数据传输不会发生延迟。由于不可预测事件驱动的数据(非既定),将对消息传输协议进行修改。传输将遵循基于时间的灵活多重访问协议。尽管消息必须在特定细微时隙中传输,消息仲裁(与CAN总线类似)将决定哪个模块可以使用可用的分段时间。到达某个细微时隙时,模块可以在短时间内传输任意动态数据。如果模块没有传输数据,它将失去该时隙,系统将继续前进至接下来的时隙。将重复此过程,直到模块传输动态数据。在传输期间,接下来的细微时隙必须等待传输完成。如果时间范围到期,则具有较低优先级的消息必须等待下一通信周期开始。注意: 每个时隙(静态或动态)均使用一系列字段(创建方式与单条CAN 总线消息类似)创建。
(5)动态分段总结

图62 蓄电池能源网络
◆事件驱动的数据指的是动态数据
◆动态数据是非既定的
◆动态分段允许传输动态数据
◆消息将遵循仲裁协议(基于时间的灵活多重访问协议)
◆通信周期是静态和动态分段的组合
(6)通信通道总结
①CAN总线
◆使用多主概念,所有模块具有相同的总线访问权限
◆在任意时刻仅可通过总线传输一条消息
◆消息需要经过仲裁以决定消息传输顺序
◆周期性消息和事件驱动的消息遵循相同的仲裁方法
◆无法保证数据的投递时间范围
②Flex Ray
◆使用TDMA协议,所有模块均根据计划获取总线的独家访问权限
◆静态消息无须经过仲裁
◆在每个通信周期传输多条消息
◆保证消息的投递时间范围
◆通信周期包含静态数据和划分了优先级的动态数据
◆所有模块均可传输和接收最新/实时的数据
(二)蓄电池能源网络(如图62所示)
1.永久蓄电池电源按照如下方式在车辆中进行分配
从蓄电池到蓄电池接线盒(BJB):接线盒这一部件包含了一些可将多个电路连接到主电源的接线。从蓄电池获取电源,然后分为多股独立的高电流消耗输出。所有“接线”均使用大型保险丝连接到主电源。因此,在发生短路时,每个输出都可以获得单独的保护。注意:BJB 位于右后侧围板饰件的下方。
(待续)
猜你喜欢
数字技术与应用(2022年7期)2022-08-03
网络安全与数据管理(2022年2期)2022-05-23
科学家(2021年24期)2021-04-25
舰船电子对抗(2020年2期)2020-06-23
小学生学习指导(低年级)(2018年11期)2018-12-03
科学与技术(2018年23期)2018-06-17
中学生数理化(高中版.高一使用)(2018年1期)2018-02-10
理科考试研究·高中(2016年10期)2017-01-17
太空探索(2016年9期)2016-07-12
山东工业技术(2016年5期)2016-03-04
