四轮迷宫机器人的三维建模与软硬件设计
2017-03-16 07:19江学焕张金亮万明周双飞
淮阴工学院学报 2017年1期
江学焕,张金亮,万明,周双飞
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
四轮迷宫机器人的三维建模与软硬件设计
江学焕,张金亮,万明,周双飞
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
迷宫机器人的机械结构对其性能影响很大,通过SolidWorks对车体、传动装置和各传感器摆放位置进行了三维建模和位置优化。系统电路设计中对系统电路架构、电源电路、红外传感电路、电机驱动电路、陀螺仪电路进行了详细的设计和叙述。软件设计中对系统软件架构、路径搜索算法和等高图法路径规划方法进行了介绍。
四轮;迷宫机器人;三维建模;等高图
0 引言
迷宫机器人又称电脑鼠(MicroMouse),本质上由机电运动部分、传感器和微处理器构成的机电一体化智能机器人,在外观上类似一辆小车。根据比赛的规则,迷宫机器人按照一定的算法和控制程序,可以在指定的竞赛迷宫进行避障、行走、转弯,最终到达所设定的目的地,并可对其行走过的路线进行记忆和比较,对路径进行最短规划,最终找出最优路径并运行至终点。迷宫机器人的设计与制作结合了机械、光学、电子、电机、控制、程序设计和人工智能等多方面知识,它很好地展现了其中各部分的综合工作和配合能力,为研究和发明更复杂的智能系统奠定了基础[1]。
迷宫机器人整体性能的优劣受多方面因素影响,机械结构、硬件电路和软件算法等。传统的两轮迷宫机器人由于结构简单,被用于最初的设计中,但随着大量的使用,暴露出由于机械结构的原因,机器人车体会随着轴心前后摆动,稳定性差,还增加了摩擦力,对于快速行进非常不利。
文献只对电脑鼠的硬件设计做了详细分析,没有对电脑鼠的机械结构及三维建模进行详细的叙述[2-3]。本文着重对迷宫机器人车体模型,齿轮传动进行了详细的计算和验证,通过合理摆放传感器的位置,全面获取迷宫机器人的周边信息,以便于软件决策。系统以Cortex-M3内核的LPC1759作为主控制器,对电机、陀螺仪、电机驱动电路、磁式编码器和红外发射接收等模块做了详细的设计与阐述,同时对软件架构和算法设计进行了介绍。
1 机械结构设计
机械结构的设计是迷宫机器人设计和制作过程中重要组成部分,迷宫机器人机械结构的好坏直接影响其各个方面的性能。迷宫机器人机械结构部分的设计主要包括车体设计、传动装置设计和传感器位置设计。
1.1 车体设计
目前IEEE迷宫机器人迷宫竞赛规则中,竞赛迷宫是由面积为18cm×18cm的方格迷宫块组成,迷宫隔墙为乳白色且厚度为1.2cm,所以迷宫墙内部通道的实际宽度只有16.8cm。与此同时,竞赛规则中规定迷宫机器人的几何尺寸必须在25cm×25cm以内[4]。考虑到机器人在迷宫中需要进行转弯、掉头等动作,本次迷宫机器人设计的宽度为64.5mm,长度为106mm,在SolidWorks下对迷宫机器人车体的三维建模模型如图1所示。

图1 迷宫机器人车体三维建模
1.2 传动装置设计
传动机构的设计重点是对齿轮的建模,当齿轮的模数一定时,齿轮的外圆直径和齿数之间就存在确定的对应关系[5],关系如下:
齿轮模数=外圆直径/齿数
(1)
本设计选用了四轮结构,相比于以前的两轮结构和带万向轮三点支撑结构的迷宫机器人,该结构在行进、转弯过程中具有更高的稳定性和可靠性,此外动力上更强劲,反应更灵活。齿轮设计模型如图2所示。

图2 齿轮模型三维图
本系统电机的主齿轮齿数为15,模数为0.5。可根据齿轮的齿数和模数计算出齿轮的分度圆直径=模数×齿数。经计算可得,电机主齿轮直径为4mm,即电机齿轮分度圆直径为4mm;轮毂齿轮为50齿,模数为0.5,则轮毂齿轮分度圆直径为25mm,可知电机与轮毂齿轮之间距离=(4+25)/2=14.5mm。减速齿轮数量为12,即减速齿轮的分度圆直径为12×0.5=6mm,可得轮毂齿轮和减速齿轮的中心距为(25+6)/2=15.5mm,可知两轮之间距离为31mm。
1.3 传感器位置设计
迷宫机器人行进过程中需要收集周边的信息,周边信息获取的越全面,对迷宫机器人本身的决策越有利。本系统采用六个传感器在车身底板上所设计的位置摆放如图3所示。
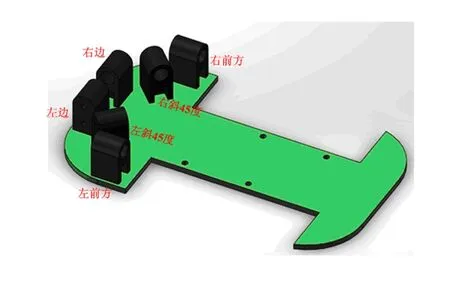
图3 红外传感器位置摆放图
图3中左右两边水平方向各摆放的一个传感器主要用来感测左右两边是否存在墙壁,以及在姿态调整中判断车体是否靠左右墙壁过近;左右斜45度方向各摆放的一个传感器主要用来在前进中姿态调整用;左前和右前竖直方向各摆放的一个传感器主要是用来判断前方是否有挡板和是否距离前方挡板过近,安装两个左前右前红外传感器是为了当车体倾斜时避免误判和迷宫机器人走斜45度线时用来检测前方是否会撞墙。
2 硬件电路设计
2.1 系统硬件电路整体架构
整个系统硬件电路包括主控器、电机、蓝牙/串口、陀螺仪、驱动电路、磁式编码器和红外发射接收等部分,如图4所示。
本系统采用NXP公司Cortex-M3内核的LPC1759作为主控制器,该微控制器具有集成度高、功耗低、接口丰富、扩展性好等众多优良的特性,使得其在嵌入式系统中得到广泛的应用。该处理器的主频可达120MHz。
系统采用2块锂聚合物锂电池串联供电,单体标称电压3.7V,串联总电压范围5.4~8.4V。通过稳压电路LM2940产生+5V电压、AMS1117产生+3.3V电压。

图4 系统硬件电路整体架构图
2.2 红外发射接收电路
红外发射接收传感器分别选用波长为900nm 的TSL262和TSL262R。传感器可以将接收到的红外光线能量转换为电压信号,该电压信号与红外传感器所接收的光能量之间存在一定的关系[6]。
红外发射管以脉冲方式发射,六组发射接收电路其中的两组红外发射接收电路如图5所示。

图5 红外发射接收电路图
2.3 电机驱动电路
直流电机的驱动电路采用ZXMHC3A01T8集成芯片,该全桥驱动的优点是只需要在一组电池系统下就能够使电机正反转。再配合PWM脉宽调制技术,调整直流马达转速。由于本系统微控制器为3.3V而电源电压为6.7~8.1V,需要宽电压驱动器MAX4427来驱动全桥电路。通过在MAX4427的输入端加上拉电阻,见图6,可以使全桥驱动器保持在刹车状态,以防控制器烧毁或者输入端口悬空时出现不稳定状态时,全桥驱动器上下半桥同时导通而导致全桥电路烧毁。
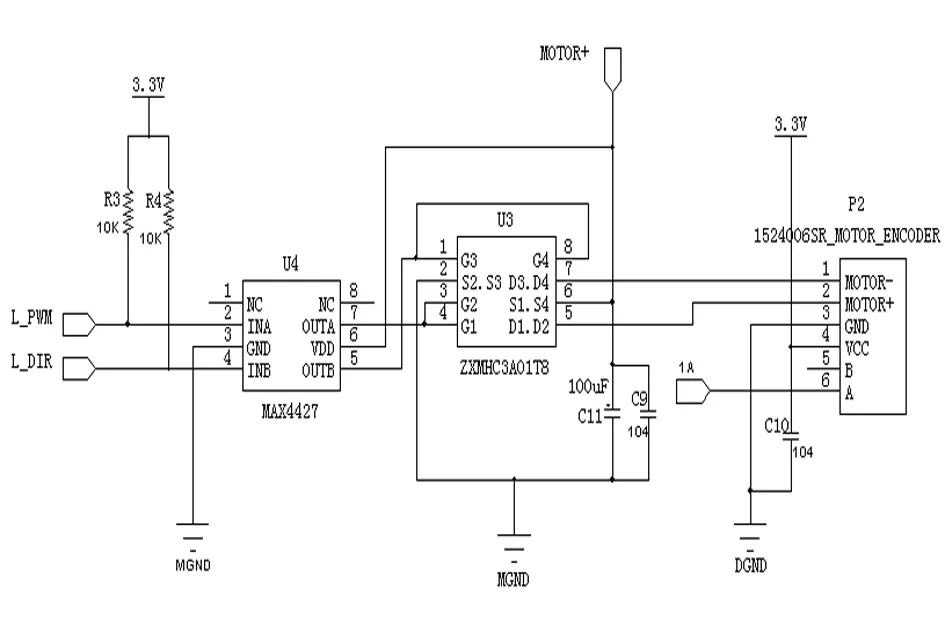
图6 电机驱动电路
2.4 陀螺仪模块
陀螺仪选用意法半导体公司的MPU6050,该芯片集成了三轴加速度和三轴陀螺仪,接口采用IIC,输出数据为数字量。控制器对传感器输出的瞬时角速度积分再乘以精度,减去温漂,即可获得转动的角度。由于迷宫机器人在一个二维水平面上运动,所以要感测其转弯角度只用对传感器Z轴的角速度用定时器积分即可获得相应的转动角度。其中,控制器以100ms为周期对陀螺仪数据进行积分,即陀螺仪积分时间精度为0.1s,陀螺仪灵敏度为,除去零漂,再根据精度值即可获得在一段时间内的角度值。由于陀螺仪长时间的积分会有累积误差所以在迷宫机器人姿态校正的同时也对陀螺仪的数据进行校正。
3 软件设计
迷宫机器人是一个智能机器人,其智能程度、灵活性以及准确性不仅取决于机械结构和硬件电路的性能,还取决于软件架构和算法设计的好坏。迷宫机器人软件流程上先通过传感器感知周边的环境,对环境信息进行加工处理,并根据相应的算法做出决策,进一步的将控制信息发送给各硬件模块,硬件模块根据指令驱动执行机构,迷宫机器人完成当前的决策动作,直到达到终点为止。
3.1 系统软件的总体流程
系统软件的总体流程如图7所示。
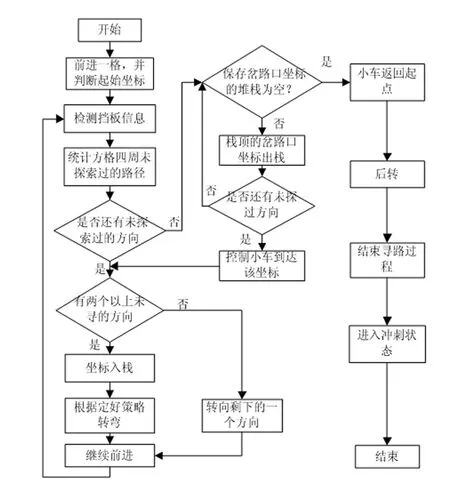
图7 系统软件流程图
3.2 搜索算法
右手法则:电脑鼠在前进的方向上存在两条和两条以上的支路时,优先考虑向右转,其次向前,最后才考虑向左。
左手法则:与右手法则相似,只不过是优先考虑左转,其次是向前,最后才考虑向右。
求心法则:求心法则就是每当电脑鼠有至少两个方向可以选择时,则优先转向离中心点最近的方向前进。
这三种法则均可以应用在迷宫搜索中,如果迷宫是未知的,任意选择一种都可以。
3.3 最短路径计算算法
假如电脑鼠搜索完整个迷宫或者只搜索包含起点与终点的部分迷宫,且记录了已走过的每个迷宫格的墙壁资料,那么它可以根据已有信息找出一条从起点到终点的最优路径。
系统利用等高地图的方法来规划最短路径[7]。首先开辟一块16x16的二维数组空间(MapStep [16][16]),其中每一个元素代表迷宫中的一个方格,用以计算后储存各方格至起点的最短路径步数(所谓步数即为路径中经过的方格数)。
当起点坐标处标识为1时,可以直接达到的相邻方格均为2,距离越远的方格等高值依次递增。通过等高图可以标出每个迷宫格到起点相等(对等)步数的关系,许多封闭路径的逃脱与冲刺的关卡都可在制作出等高图后迎刃而解,使机器人更容易逃脱,少走一些弯路。
4 结束语
本文基于SolidWorks软件提出了四轮迷宫机器人的三维建模设计方法,同时,对系统软硬件设计进行了详细的介绍。使用三维建模的方法对迷宫机器人进行设计,可以提高设计效率,优化机械结构,设计好的结构部件可直接用3D打印机打印出来。这种方法可以应用在对一些产品的前期验证开发中。
[1] 周立功.IEEE电脑鼠开发指南——基于MicroMouse615迷宫智能鼠[Z].广州:广州致远电子有限公司,2008.
[2] 付秀伟,张骅.基于ARM-M3的电脑鼠硬件设计[J].吉林化工学院学报,2012(1):47-49.
[3] 白龙彪.IEEE迷宫电脑鼠的设计与研究[D].西安:西安科技大学,2014.
[4] 林国恩.电脑鼠的设计与制作[D].台北:龙华科技大学, 2010.
[5] 张永智.机械零部件与传动结构[M].北京:机械工业出版社,2011.
[6] 赵俊逸,林志贤.在电脑鼠设计中使用红外LED管测距的研究[J].单片机与嵌入式系统应用,2007(7): 84-85.
[7] 王凤林,王宜怀.一种电脑鼠走迷宫算法的设计与实现[J].计算机应用与软件,2010(12):270-272.
(责任编辑:孙文彬)
3D Modeling of the Four-wheel Maze Robot and Its Software and Hardware Designing
JIANG Xue-huan, ZHANG Jin-Liang, WAN Ming, ZHOU Shuang-Fei
(School of Electrical and Information Engineering, Hubei University of Automotive Technology, Shiyan Hubei 442002, China)
The mechanical structure of the maze robot has a great influence on its performance. The 3D modeling for robot body, transmission device and the sensor placement are optimized by Solid Works. In the system circuit design, the system architecture of the circuit, power circuit, infrared sensor circuit, motor drive circuit and gyroscope circuit are detailed designed and described. In the software design, the system software architecture, the path search algorithms and the contour map method of path planning methods are introduced.
four-wheel; maze robot; 3D modeling; contour map
2016-10-19
湖北省重点实验室开放基金项目(ZDK1201503);湖北省科技支撑计划项目(2015BAA049)
江学焕(1982-),男,湖北襄阳人,硕士,主要从事嵌入式系统、汽车电子的研究。
TP242
A
1009-7961(2017)01-0010-04
猜你喜欢
环球时报(2022-05-23)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
百科探秘·航空航天(2017年9期)2017-12-31
文理导航·科普童话(2016年7期)2017-02-04
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
文理导航·科普童话(2016年4期)2016-05-31