“S”无碳小车结构设计及优化研究
2017-03-15 20:25刘旭勤
中小企业管理与科技·下旬刊 2017年2期
关键词:优化设计
刘旭勤
摘 要:全國大学生工程训练综合能力竞赛是教育部高等教育司发文举办的全国性大学生科技创新实践竞赛活动。利用重力势能转换设计的无碳小车,需驱动小车行走和转向。本文以全国大学生工程训练综合能力竞争中的“S型无碳小车”设计为例,介绍了小车的设计方案及主要部件设计计算方法,并针对理论设计方案的不足之处进行了相应的优化改进。优化后的小车,能够最大程度地满足竞赛的要求,为今后小车的设计及调试提供了指导意义,也为相关机构的应用研究提供参考价值。
关键词:无碳小车设计;能量转换;方向控制;优化设计
中图分类号: V462 文献标识码: A 文章编号: 1673-1069(2017)06-156-2
1 无碳小车研究意义
全国大学生工程训练综合能力竞赛是教育部高等教育司发文举办的全国性大学生科技创新实践竞赛活动,是基于国内各高校综合性工程训练教学平台,为深化实验教学改革,提升大学生工程创新意识、实践能力和团队合作精神,促进创新人才培养而开展的一项公益性科技创新实践活动。
开展大学生工程训练综合能力竞赛旨在促进各高校提高工程实践和工程训练教学改革和教学水平,培养大学生的创新设计意识、综合工程应用能力与团队协作精神,促进学生基础知识与综合能力的培养、理论与实践的有机结合,养成良好的学风,为优秀人才脱颖而出创造条件。
2 无碳小车设计的要求
竞赛要求设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换而得到的。该给定重力势能由竞赛时统一使用质量为1kg的标准砝码(¢50×65 mm,碳钢制作)来获得,要求砝码的可下降高度为400±2mm。标准砝码始终由小车承载,不允许从小车上掉落。
在比赛中要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量。小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地。小车为三轮结构。其中一轮为转向轮,另外二轮为行进轮,允许二行进轮中的一个轮为从动轮。小车在1000±200~300mm范围内产生一个“S”型赛道第一轮障碍物间距变化值和变化方向。
竞赛中小车在前行时能够自动绕过赛道上设置的障碍物,赛道宽度为2m,障碍物为直径20mm、高200mm的圆棒,沿赛道中线从距出发线1m处开始按间距1m摆放,摆放完成后,将偶数位置的障碍物按抽签得到的碍物间距变化值和变化方向进行移动(正值远离,负值移近),形成的即为竞赛时的赛道。以小车前行的距离和成功绕障数量来评定成绩。
3 无碳小车设计方案
根据竞赛要求分析,可以知道无碳小车的设计重点和难点是如何将重物的势能转换为机械能并驱动小车行走的距离最长和小车前行时如何避开道路上设置的障碍物。设计思路为:查阅相关资料,拟定将给定重物的势能转换为机械能的结构和小车自动避障的机构,确定小车一个周期行进的路线和长度,确定后轮尺寸和前后轮的传动比,传动机构设计,小车车架总体结构设计,小车各零件的设计(包括材料和结构),主要零件配合部分尺寸及公差的确定、形状、位置的确定。
由于是第一次制作,很多因素无法预知,我们考虑相对简单的结构方案,重物下落时直接带动小车行走,结构简单,加工方便,成本也较低。绕在小车轴上线的一端通过定滑轮连接在重物上,重物下落直接通过绳子带动小车前行。为了避免重物下落时因为小车的行走而摆动,影响小车行进的轨迹,甚至使小车倾翻,因此在小车上设计了阻止小车摆动的3根竖杆,3根竖杆由套圈固定,杆与下落重物圆周相切,形成一个圆柱形状,使之下落稳定。
小车传动结构方面,采用较简单的直齿齿轮传动,由于下落高度只有400±2mm,要想跑的远,要么加大驱动轮直径,要么增加传动比。综合考虑,采用一级齿轮传动。转向结构采用空间四杆机构。
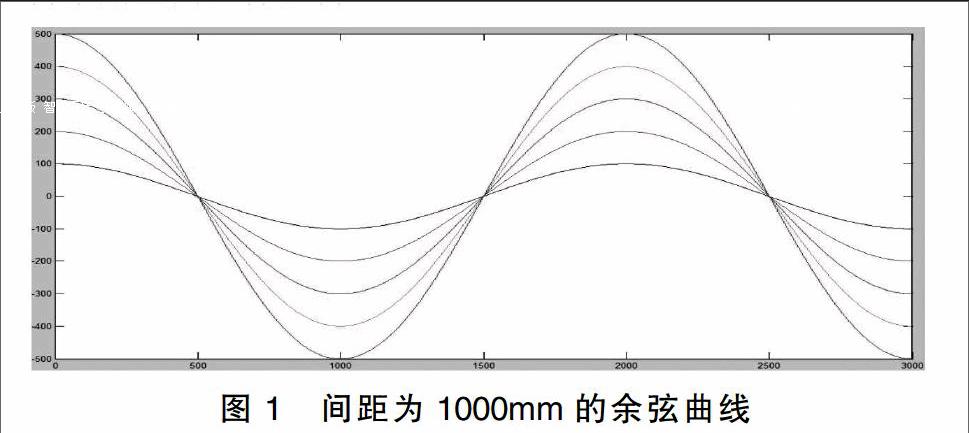
通过对项目要求分析可知小车的前进路线,我们可以将它近似地看成余弦函数
y=Acosωx
其中,A为振幅,ω为频率。函数的图像就类似于小车前进的路线,如图1所示。
3.1 传动比的确定
按照理想化的思想,传动比越大,小车能跑得越远,但是考齿轮减速比太大,会造成大齿轮直径过大,使小车结构不协调,重心会产生偏移,从而运动过程容易翻车,因此按照传动比的选择原则,同时考虑到小车在行驶时要求传动比准确和加工工艺性,将传动比初步确定为1:4,大齿轮齿数为80,小齿轮齿数为20。设定小车轨迹中线与小车理想轨迹的最大偏移量为 300mm,根据扇形计算公式计算得出小车沿弧线行走距离约为 2450m。由上分析可以确定小车后轮的理论直径为190。
3.2 转向机构的设计
转向机构的稳定直接影响到小车在运动过程中的稳定性和行走路线的准确性,因此,转向机构的选择是无碳小车设计的关键部分,这直接决定着无碳小车的使用功能。我们考虑用四杆机构,将旋转运动转换为小车转向地来回摆动,以实现拐弯避过障碍物的功能。考虑到障碍物不是固定的距离,设计一个转向盘作为短杆,转向盘沿直径方向开一字槽,用于调节短杆长度。连杆也必须可调,用于调节前轮左右摆角的对称性,可将连杆做成两段,通过螺纹连接进行调整。3.3 绕线轮的设计
由于小车运行驱动要考虑自重及车轮材料、行进赛道的摩擦系数等因素,具体要求如下:驱动力要适中,使小车既能顺利启动,又不至于因小车加速使其在拐弯时速度过快而引起倾翻。
我们要控制重物下落的速度,使重物的势能尽可能地转化为小车的动能,让小车平稳匀速的运动,达到运行更远的目标。
由于影响小车运动的因素较多,最直接的就是赛道的摩擦系数,在不同材料的赛道上面无小车需要的驱动力是不一样的。在赛道确定前,是不知道需要多大的驱动力才能恰到好处。因此驱动机构还需要能根据不同的需要调整其驱动力,即调整绕线轮的大小。
重物下落是加速的,如果我們设计的绕线轮没有锥度,小车的驱动力恒定的情况下,小车也会加速。速度不断增加,会引起小车在转弯处侧翻,因此,考虑绕线轮做成圆锥形状。
为了达到上面的要求,我们根据小车各部分材料,估算出小车的质量为2.5kg,车轮和赛道摩擦系数0.08,可以估算出小车驱动轮的最小驱动直径为38mm,取 40mm。
4 方案的优化
根据设计的方案,我们制作出了小车,并进行了实际试跑。从中我们发现了以下主要问题:实际跑动距离比理论距离相差甚远;小车运行轨迹基本与理论相符,但转向稳定性很差。
针对以上问题,我们对小车进行了优化改进。
对问题1的改进:按照设计方案,我们把两个后轮都做成主动轮,这样会大大增加其与赛道的摩擦,直接导致能量损耗过大,跑动距离就短。优化后将其中一个后轮做成被动轮,再次试跑效果明显。
对问题2的改进:小车运行过程中,前轮轮叉刚性不足是跑动不稳定的主要原因,我们初始方案使用的材料为3D打印的ABS,直径也很小,故出现不稳定的问题。优化后采用铝材制造,再次试跑效果明显。
优化后小车与地面摩擦减小,我们又对驱动线轮进行修改,最后车驱动轮的最小驱动直径为15mm。
5 总结
本文介绍了S型转向运动无碳小车设计研究的意义,并介绍了总体设计方案和分析了主要部件的设计方法,并针对原方案的不足之处进行了相应的优化改进。从设计到制作,利用现代工程原理,很好的解决能量转换的问题。小车经过调试后,运行平稳、匀速。小车的转向运动轨迹完全符合赛道的要求,相信能取得不错的成绩。
参 考 文 献
[1] 全国大学生工程训练综合能力竞赛[EB/OL].http://www.gcxl.edu.cn/html/history/.
[2] 魏朗,余强.现代最优化设计与规划方法[M].北京:人民交通出版社,2005.
[3] 郭卫东主编.机械原理[M].北京:科学出版社,2010.
[4] 濮良贵,纪名刚.机械设计[M].8版:北京高等教出版社,2006.
[5] 机械设计手册编委会.机械设计手册[M].北京:机械工业出版社,2004.
猜你喜欢
航空兵器(2016年4期)2016-11-28
科技资讯(2016年19期)2016-11-15
文理导航(2016年30期)2016-11-12
科学与财富(2016年28期)2016-10-14