
全自动独立加码1kN静重式力标准机的技术研究
2017-03-13 01:40:22郭贵勇马兴
电子元器件与信息技术 2017年6期
郭贵勇,马兴
(福建省计量科学研究院,福建福州 350003)
0 引言
力值计量与国家的经济建设、国防建设、科学研究及人民生活有着重要的关系[1]。力值计量单位N(牛顿)是质量的导出量单位,质量是七个基本物理量中唯一用实物砝码复现量值的基本物理量。因此,力值也是采用实物砝码复现量值的物理量[2],力值以标准砝码在特定的环境所受的重力来复现,可以获得较高的准确度[3]。静重式力标准机(以下简称静重机)是采用砝码作为标准力值,通过一定的组合机构将吊挂及砝码产生的标准力值传递至被检计量器具上,实现对测力仪、负荷传感器(尤其是高准确度传感器)等进行检定、校准。广泛应用于计量技术机构、传感器制造企业、智能控制、科研院所等相关行业,以确保力值溯源与量值传递的准确、可靠。除此之外,可应用于称重传感器的型式评价试验(含高低温试验)力学性能测试等[4-7]。福建省计量科学研究院新建成的一台全自动独立加码的1kN静重机,具有以下技术优势:整体结构合理,砝码级数最大限度细化具有不同组合方案,不存在交换砝码以避免逆程现象,采用独立加码的驱动机构,采用伺服控制系统及吊挂防摆装置的良好配合等,满足国家标准和OIML R60的规定要求。
1 设计方案及工作原理
1.1 设计方案
如图1所示,1kN静重机由两部分组成:主机部分(主机机架、反力框架、砝码、吊挂、驱动机构等)和控制部分(伺服电机、可编程控制器、计算机软件系统等)。其中主机部分是实现对被检测力仪测试的机械装置,其核心是砝码组以及砝码驱动机构。控制部分是由计算机软件系统和PLC为主要控制元件的控制装置,是砝码执行动作的关键。

图1 1kN静重机基本组成的示意图Fig.1 Diagram of basic components 1kN dead-weight force standard machine
该1kN静重机的整体方案是以国家标准和OIML R60规定进行设计的,实现不同砝码的组合方案,任意力值施加时间均小于15s,可对任意单块砝码进行独立加卸载,加载速度可控,实现对负荷传感器等测力产品进行蠕变、蠕变恢复等全部指标检定、校准。控制部分的操作具有手动、半自动和自动三种模式,在Windows操作系统下,编译应用软件符合人机工程学,全部试验状态、数据等均采用实时动态显示,实现数据的自动采集和高效处理。整机运行状态实时监测,自动诊断故障,器件的技术先进、可靠、实用并具有模块化设计,为将来的技术更新预留接口。
2.2 工作原理
如图1所示的主机部分,其是根据力的动力学原理,将已知质量大小的砝码重力以复现基准力值。加载时,将砝码重力通过反向器及中心吊挂加载到被检测力仪上,通过砝码的质量便可计算出作用于被检测力仪的载荷。考虑空气浮力的影响并根据牛顿第二定律,对于质量为m的砝码在空气中的重力f为:

式中:g —砝码所在地的重力加速度;ρa、ρw—分别为砝码所在地的空气密度、砝码材料密度。
由于重力加速度和密度都是常数且砝码的质量可通过高准确度天平进行称量,因此,对于静重机的研究重点是其机械结构、加卸砝码的方式合理等。
3 整机关键技术
3.1 主机机架
主机机架采用四立柱结构,加工时充分考虑两边的同步性,保证足够的刚度和强度。移动横梁是力标准机安装被检测力仪的工作部位。移动横梁驱动机构采用高精度丝杠、螺套和同步带,由电机驱动,保证移动横梁上下移动的两边同步性。
3.2 砝码与吊挂
该1kN静重机采用两级吊挂,满足压向和拉向检定的不同需求,一级吊挂和二级吊挂分别为20N。砝码总重 1000N,共28块,5块 10N、8块 20N、5块 30N、1块40N、2块 50N、4块 60N、2块80N及1块100N,通过不同的砝码自由组合,实现最大限度的负荷级数,最大限度细化载荷级数,满足不同检定点的载荷要求。其中,吊挂材质为铝合金,而砝码材质为304不锈钢,并经过消磁和热处理表面镀硬铬以达到防腐和耐磨,最终确保力值可长期保持恒定。
3.3 驱动机构
如图2所示为1kN静重机示意图,它是通过单独的驱动机构完成每块砝码的加卸载动作,具体是以伺服电机和减速机作为驱动机构,驱动凸轮机构转动,带动托架(滑块)进行垂直升降运动,从而提升或降落托架上的砝码。当托架升降时,砝码随之升降,实现砝码在中心吊杆上的加卸动作。该独立加码机构使整机结构大大简化,砝码任意组合,拓展加载自由度
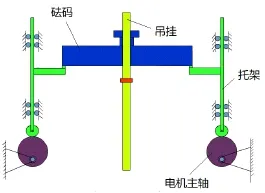
图2 独立加码机构示意图Fig.2 Schematic diagram of loading weights respectively mechanism

图3 独立加码机构实物图Fig.3 Picture of loading weights respectively mechanism
该电动独立加码方式,每块砝码加卸动作均由电动机控制。托架的行程取决于凸轮偏心量的大小,升降的速度取决于电动机的转速,所有砝码的加卸载状态均可由接近开关来控制。电动驱动有利于实现数字化控制,由于独立驱动,对原电机的功率要求大为降低,且每一层砝码的驱动具有相同的结构,便于模块化设计,确保该1kN静重机具有结构简单、自动化程度高、可靠性高、易于维护等优点。
3.4 吊挂防摆装置
如图4所示为吊挂防摆装置,通过自动判断砝码加卸载或空闲不动作的实时状态,实时主动控制上下反复运动的定位板对吊挂底部锥形轴进行位置限位与松开,从而实现了减小或者消除吊挂因砝码加卸载而可能引发的低频晃动,同时检测出实际晃动幅度。
3.5 计算机软件系统
计算机软件系统通过PLC自动控制砝码和驱动机构的动作,对被检测力仪的测试按照设定要求,完成砝码自动加卸载、试验数据采集处理等工作[8-11]。
计算机软件系统主界面十分简洁,操作具有手动、半自动和自动三种模式,具有检定所需要的全部功能。工作状态可参考初始主画面的颜色提示来进行调整,各种颜色表示的各种状态:如吊挂防摆装置的松开抱紧状态实时显示,砝码加卸载状态的状态切换,检定时各种读数与计时状态显示,以及出现故障时的状态提示等。

图4 吊挂防摆装置实物图Fig.4 Picture of hanger anti-pendulum device
4 性能试验测试
如图5所示,试验测试使用多台0.01级测力传感器及精密数字测量仪 DMP40,负荷点覆盖了1kN静重机的全量程范围(40~1000)N。经过大量性能试验测试,测试结果如图6所示,力值误差和重复性均不大于0.01%。

图5 1kN静重机性能测试现场Fig.5—Performance testing of 1kN dead-weight force standard machine

图6 性能试验测试结果Fig.6—Result of performance testing
具体测试如下:依据JJG 734-2001《力标准机检定规程》的要求[12]进行试验测试。力值重复性R和力值误差δ分别由式(2)、(3)计算:

式(2)和(3)中:X0max、X0min和X0,分别为在本机同一负荷下,在0°方位时,静重机参考标准的力值输出最大、最小和平均值。为检定前和检定后,标准测力仪在力基准机的某个负荷下,两次定度所得输出的平均值。X为在本机同一负荷下,根据标准测力仪在 0°方位上测出的第一次输出与90°、180°和270°方位上得到的输出平均值。
5 结论
该1kN静重机采用了先进的智能设计理念和全自动独立加码等关键技术,结构合理的主机机架,砝码与吊挂的科学组合方案,独立加码的驱动结构较好地保证每一块砝码单独或多块砝码组合的加卸载快速,吊挂防摆装置减小或者消除吊挂因砝码加卸载而可能引发的低频晃动以实现平稳的高精密控制,计算机软件系统的多模式操作及智能诊断确保整机控制动作的准确无误。整机经过性能试验测试,验证了力值重复性和示值误差都控制在0.005%以内,测试结果表明整机的准确度优于0.01级静重机的计量指标要求,符合预期设计目标。
[1] 张智敏,张跃,周宏,张学成,吴鲲,胡刚. 全自动 1 MN 静重式力标准机[J].计量学报,2008,29(1):65-68.ZHANG Zhi-min,ZHANG Yue,ZHOU Hong,ZHNAG Xue-cheng,WU Kun,HU Gang. A Full-automatic 1 MN Deadweight Force Standard Machine[J].ActaMetrologicaSinica,2008,29(1):65-68.
[2] Jabbour Z J,Yaniv S L. The Kilogram and Measurements of Mass and Force [J]. Journal of Research of the National Institute of Standards and Technology,2001,106(1):21-46.
[3] 徐尹杰,陈世超,唐韵,易伟. 静重式力标准机自动控制系统的研制[J].中国测试,2010 ,36(6):65-67.XU Yin-jie,CHEN Shi-chao,TANG Yun,YI Wei. Development of Automatic Control System for Deadweight Force Standard Machine[J]. China Measurement,2010 ,36(6):65-67.
[4] 曹新成,刘大威. 500kN电动独立加码静重式力标准机砝码加卸驱动问题研究[J].工程与试验,2012,52(2):53-56.CAO Xin-chen,LIU Da-wei.Research on Drivers of Weights of the 500kN Deadweight ForceStandard Machine with Electric Drivers for-Every Weight [J].Engineering &Test,2012,52(2):53-56.
[5] 陆晨,李婷.一种静重式力标准机砝码连接结构设计和应用[J].衡器,2012,41(11):1-4.LU Chen,LI Ting. Design and Application of a Deadweight Force Standard Machine Weight Connection Structure[J].Weighing Apparatus,2012,41(11):1-4.
[6] 张俊峰. 一种新型静重、液压和叠加组合式力标准机[J].中国计量,2012,(12):68-69.ZHANG Jun-feng. A New Type of Dead-weight,Hydraulic and Built-up Combined Force Standard Machine[J].China Metrology,2012,(12):68-69.
[7] 刘薇娜,李明,杨立峰.机械零件标准化系统的开发研究[J]. 新型工业化,2014,4(9):34-38.LIU Wei-na,LI Ming,YANG Li-feng.Development of Mechanical Standardized Parts Database[J].The Journal of New Industrialization,2014,4(9):34-38.
[8] 张学成,周长明,马雁,李春光,于立娟. 静重式力标准机工作状态形象化全自动监控[J]. 计算机测量与控制,2016,14(6):790-793.ZHANG Xue-cheng, ZHOU Chang-ming, MA Yan, LI Chun-guang, YU Li-juan. Visual and Automatic Surveillance and Control Of the DeadweightNorm Force Machine’ s(DWNFM)Working States [J].Computer Measurement & Control,2016,14(6):790-793.
[9] 赵敏. 砝码摆动对静重式力标准机标准力值的影响[J].衡器,2016,45(9):19-21.ZHAO Min. The Influence of Weight-swings on the Standard Force in DWM[J].Weighing Apparatus,2016,45(9):19-21.
[10] 倪晗悦,丁嘉毅,曹婷,张胜.基于PID及PWM的无线传能系统研究[J]. 新型工业化,2014,4(9):56-61.NI Han-yue,ZHANG Sheng,DING Jia-yi,,CAO-Ting. Wireless energy transfer system based on PID and PWM[J].The Journal of New Industrialization,2014,4(9):56-61.
[11] 肖晖,韩轩,孙智权,等.基于Matlab的砝码自动装卸机械手图像定位方法的设计与研究[J].新型工业化,2014,4(12):25-30.XIAO Hui,HAN Xuan, SUN Zhi-quan. Design and research of automatic weight loading and unloading manipulator image positioning method based on Matlab[J].The Journal of New Industrialization,2014,4(12):25-30.
[12] 国家质量监督检验检疫总局.JJG 734-2001力标准机检定规程[S].北京:中国计量出版社,2001.General Administration of Quality Supervision,Inspection and Quarantine of the People’s Republic of China. JJG 734-2001 Verification Regulation of Force Standard Machine[S].Beijing: Chinese Metrology Press,2010.
猜你喜欢
品牌与标准化(2023年6期)2023-11-05 13:42:38
综艺报(2022年8期)2022-04-29 21:17:53
四川劳动保障(2021年5期)2021-07-19 06:09:32
重型机械(2020年2期)2020-07-24 08:16:08
知识经济·中国直销(2018年7期)2018-07-27 02:49:38
魅力中国(2016年50期)2017-08-11 02:53:03
股市动态分析(2015年29期)2015-09-10 07:22:44
机电信息(2015年28期)2015-02-27 15:57:40
机床与液压(2015年23期)2015-02-24 07:39:20
吉林农业(2014年6期)2014-08-08 16:20:00
