
35G高性能窄波平板雷达产品总体设计
2017-03-09 12:39何洪宁仝大伟
中国新通信 2017年2期
何洪宁+仝大伟
【摘要】 采用了多普勒效应原理:当目标靠近雷达时,反射信号的频率高于发射机的频率;反之,当目标远离雷达时,反射信号的频率低于发射信号的频率,即可由信号发射与接收频率的差值,从而计算得到目标的速度值。将中频正交的两路信号进行AD转换,通过FFT对IQ信号从时域转换到对应的频域,求出其幅值和方向,最后确定目标的运动方向,并通过RS232信号传输到相应的上层平台。
【关键词】 多普勒效应 35GHz 窄波雷达 测速
一、多普勒效应
Radar(Radio Detection Ranging): 无线电探测和测距雷达是一种通过发射电磁波和接收回波,对目标进行探测和测定目标信息的设备。 当雷达发射一固定频率的脉冲波对空扫描时,如果遇到活动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度。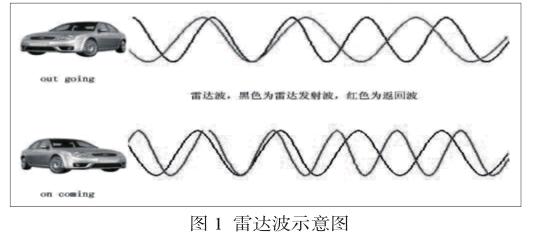
我们知道当目标与雷达站之间存在相对速度时,接收到回波信号的载频相对于发射信号的载频
因此,雷达只要能够测量出回波信号的多卜勒,就可以确定目标与雷达站之间的相对速度。
35G高性能窄波平板雷达用于车辆监测是依据多普勒效应原理实现的。由雷达发出一束微波,遇被测目标(车辆)时微波被反射回来,再由雷达接收反射波。如果目标相对于雷达有径向运动,反射波的频率将与发射频率发生差异,而这种差异的大小正比于目标与雷达的相对运动速度。于是,雷达通过检测反射波频率和发射波频率的差,就可以计算出被测车辆的移动速度。
二、窄波束雷达
窄波束雷达被称为窄波雷达,是因为其自身雷达发射波瓣角非常窄,也被称之为单车道雷达测速仪,雷达有效测量范围,只限定在一个车道,有效的避免了相邻车道的车辆速度干扰,所以被称之为单车道雷达,而其又被称之为平板雷达,是用户从外观上给出的直观的名称,普通雷达的发射天线是喇叭型,而窄波束雷达测速仪的发射天线是平板型的,比起普通的宽波雷达,其优越性在于其能有效的避免相邻车道车辆的速度干扰,确保执法取证的正确性、严肃性、唯一性。
三、测速算法系统设计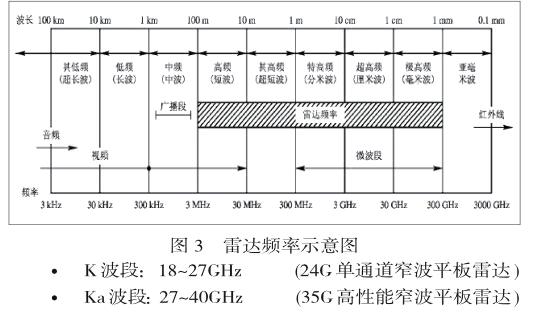
本項目采用的为ka波段,为35G高性能窄波平板雷达。
雷达天线的接收部分,对信号进行中频放大,然后通过在中频上面进行AD采样,将采样后的信号送入到TMS320F2812的DSP上面去,进行处理,得到的速度值通过RS232传输到相应的客户端显示出来,最终可以通过客户端来查看到超速的速度值。
雷达是利用电磁波的二次辐射、转发或目标固有辐射来探测目标,获取目标空间坐标、速度、
特征等信息的一种无线电技术。其测速的原理是采用了多普勒效应(Doppler Effect)原理。
雷达信号处理方法:进行FFT变换,对噪声和杂波进行处理,提取出目标,通过计算,得到目标速度,并运用相机对目标进行抓拍。
信号处理部分包括以下几个步骤:
1、检测信号是否饱和;如果信号太强,并且经过中频放大之后,得到的信号处于饱和状态,那么是无法对回波中的目标来进行判决的。2、将AD转换之后的两路数据,进行FFT变换,得到其频率的相应的信息;通过调用库中的FFT函数,来最大化的将雷达的结果进行搞定。3、根据采样的数据得到噪声的电平;通过求一组数据中的噪声电平,来确定基本的判决门限;4、帧内目标的检测;对雷达进行检测,通过门限的判决来确定回波信号中是否存在着相应的目标。5、计算速度;通过得到的频率来速度进行相应的计算。6、目标的帧间相关;通过前后两帧的数据,来进行判断是否有效;7、目标的输出;通过RS232将得到的数据信息传送到雷达的数据端上去。
最后输出的车辆所超越的速度,以及超越速度的大小,通过RS232传输到相应的客户端上面去。得到相应的信息。
核心功能模块
高性能窄波平板雷达软件主要有三个核心模块:快速傅里叶变换模块(将IQ两路信号转换到频域)、帧内目标检测模块(检测目标,并且进行目标的相关操作)、目标帧间相关模块(通过几帧抽样数据确定目标速度)。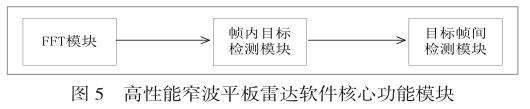
各个模块工作原理
(1)FFT模块:即快速傅里叶变换。在雷达接收模块中,得到中频正交的IQ两路信号。运用
F2812的AD转换模块,将模拟的两路正交信号采样,得到数字IQ的正交信号。FFT的目的,将IQ两路的离散时间数字信号,转换到对应的频域信号。通过分析频域信号的一些信息,进而分辨出目标。FFT模块是包含于F2812含有的TI库,对1024个点进行转换的时候,先进行排序,采用基2的转换方式,计算的速度比普通的DFT要快上许多。通过FFT的转换,然后计算出1024个点中的噪声电平。将噪声电平和FFT计算出的幅值,传输到下个目标模块中去。
(2) 帧内目标检测模块:该模块包含三个步骤,首先是对检测目标,通过判决的门限,确定目
标的数目和相应的频率值。然后对目标进行相关,确定两个距离或者速度接近的目标,是否判断为一个目标。最后是计算速度,通过雷达波的载频,以及目标对应的频率值,计算出各个目标的速度值。
(3) 目标帧间相关模块:对输入的目标,进行帧间相关处理,如果该目标与与已有的目标相关,
则更新该目标的输出输出,否则增加新的目标。最后输出目标到目标输出缓冲区,通过串口发送目标数据。
四、结论语
随着车辆数量的不断增加,交通事故发生的频率也越来越高。十次事故九次快,绝大多数事故的主因都是超速。根据国际权威机构测算,机动车行驶速度每降一公里,交通事故可以减少3%。如果采用窄波雷达对车辆进行测速监控,可以预防因超速引起的道路交通事故,降低交通事故的发生概率。雷达测速仪可以对车速进行测量,对超速的车辆,进行抓拍或者现场提醒,从而达到减少交通事故,保障交通安全的目的,为和谐社会的建设产生有利的保障。
参 考 文 献
[1] 贾兴泉 连续波雷达数据处理[M]. 北京:国防工业出版社,2005.
[2] 刘国岁 随机信号理论与应用[M]. 北京:兵器工业出版社,1992.
猜你喜欢
数学大王·中高年级(2021年4期)2021-04-27
科普童话·百科探秘(2020年5期)2020-09-14
大众科学·中旬(2019年5期)2019-09-10
小学生导刊(高年级)(2016年11期)2016-11-14
CHIP新电脑(2016年7期)2016-07-18
少年科学(2015年7期)2015-08-13
物理教学探讨(2014年5期)2014-09-18
疯狂英语·口语版(2013年7期)2013-08-01
环球时报(2013-01-09)2013-01-09
小哥白尼·军事科学画报(2009年4期)2009-05-11
