空气弹簧支撑的Hexapod微激振平台自动调平研究
2017-03-08 12:34:17关睿雪王海强
航天器环境工程 2017年1期
关睿雪,黄 海,黄 舟,王海强
(1.北京航空航天大学 宇航学院,北京 100191;2.中国工程物理研究院 总体工程研究所,绵阳 621999;3.中国空间技术研究院 通信卫星事业部,北京 100094)
空气弹簧支撑的Hexapod微激振平台自动调平研究
关睿雪1,黄 海1,黄 舟2,王海强3
(1.北京航空航天大学 宇航学院,北京 100191;2.中国工程物理研究院 总体工程研究所,绵阳 621999;3.中国空间技术研究院 通信卫星事业部,北京 100094)
Hexapod微激振平台具有负载重量大和振动量级小的特点,为了实现精确卸载、作动器小量级精密控制,研制了基于空气弹簧支撑的Hexapod微激振平台。该平台包括负责工作状态承载的4点梯形分布的空气弹簧柔性支撑和负责非工作状态承载的 3点刚性辅助支撑两部分。针对该平台自动调平控制的两大问题:即柔性支撑与刚性支撑之间存在的力耦合以及气路控制中存在的非线性和时延性,提出了连续充气和脉冲充气相结合的开关控制策略。为验证自动调平控制的可行性,在负载重量约为 200 kg的Hexapod微激振平台上进行试验,结果表明,平台可在140 s内实现自动调平,且6个作动腿位移误差不超过1 mm。
Hexapod微激励系统;辅助支撑;空气弹簧;自动调平;开关控制
0 引言
气动支撑系统(气撑系统)因其安装高度小、承载力/质量比高、自振频率低等优势,成为精密隔振平台和重载微激振平台中常用的柔性支撑[1-3]。在重载微激振平台中,其气撑系统主要用于支撑负载重量,激励单元主要用来提供振动激励所需的动态力。气撑系统在支撑负载重量情况下还需要承担平台台面调平的功能,而调平精度又会直接影响激励单元的可用作激励的能量量级。另外,考虑到激振平台的高稳定性要求,气撑系统一般采用多点支撑方案,由此引伸出了多点支撑调平和多点调平控制问题[4-5]。基于空气弹簧、电磁阀、气管等元件的物理特性,气撑系统是一个时延的、非线性时变系统[6-7],这增加了多点气撑系统的控制难度。针对气撑系统的特性,诸多研究者设计了多种气撑方案和调平策略(或调平控制方法)。文献[8]针对正方形布局的空气弹簧隔振地基和开关型气路控制系统,提出了解耦的分段调平策略,可在120 s内达到0.01°的姿态控制精度。文献[9]针对文献[8]系统,从传感器精度、气动滞后性和气动开关系统的电磁阀开关频率等角度定量分析了调平角度误差。文献[10]以 6点空气弹簧支撑的隔振平台高度调平为目标,借助模糊控制,运用PLC调节电磁阀开闭时间,使得平台高度在20 s内实现了±0.3 mm的控制精度。同样地,文献[8]也采用了分段调平策略,粗调以快速地使平台调整至工作高度,精调以保证稳态精度。文献[11]针对文献[10]的系统,以承载均匀性为优化目标,将多点支撑的超静定问题转化为静定问题,并定性分析了空气弹簧工作高度的耦合特性,根据耦合程度将控制划分为“粗调”与“精调”;最后将解决静不定多变量耦合问题的方案融入到模糊控制器中,实现了隔振平台姿态的自动控制。上述气撑系统采用空气弹簧作为主要元件,以指定的平台姿态或位置为调平目标,均取得了满意的调平效果。但调平精度只考虑了平台姿态或位置,并未同时考虑平台姿态和位置在所有自由度上的精度。
本文针对 Hexapod多自由度微激振平台设计研制了专门的气撑系统,并提出了一套连续充气和脉冲充气结合的分段式开关控制策略,以实现该平台在多个自由度上的精确调平。
1 Hexapod平台的气动支撑系统及其调平
Hexapod微激振平台[12]由上、下平台,音圈电机驱动的作动腿,空气弹簧与辅助支撑组成(见图1)。微激振平台需要承担大的负载,为了避免安装和卸载时对柔性支撑的冲击,选用了3个对称分布的刚性辅助支撑。当激振平台工作时,需撤去刚性支撑,负载由4个空气弹簧作为柔性支撑来承担。
针对4点支撑的空气弹簧布局,设计了自动调平控制策略,即通过空气弹簧的自动充气,实现刚性辅助支撑的卸载,同时使6个作动腿到达至标准位置(尽可能使6个作动腿距标准位置的位移误差接近0)。
本文提出的调平流程为:由3个刚性辅助支撑将6个作动腿调整至标准位置,而后空气弹簧逐渐充气,并承担负载重量,直至辅助支撑力接近0,此时作动腿位移误差也接近0。考虑到刚性辅助支撑在调平中的测量作用,在其上设计安装了力传感器:一方面,未工作状态下,刚性辅助支撑可将6个作动腿托举至标准位置,此时6个作动腿的位移误差取决于刚性辅助支撑对 Hexapod平台的粗调平精度;另一方面,工作状态下,自动充气开启后,力传感器信号可作为自动调平的测量信号,并作为控制信号通过控制器实现4个空气弹簧的充气,直至3个力传感器数值为0,此时自动调平结束。而力传感器的数值与作动腿的位移误差就成为最后调平精度的衡量标准。
2 调平方案
2.1 力学分析
刚性辅助支撑包含3套丝杆升降机和S型力传感器,其中力传感器以120°角均布在平台上。柔性支撑则包括4套空气弹簧及其安装连接件,空气弹簧安装位置呈梯形分布(见图2和表1)。
充气过程中力平衡方程为
式中:Fi(i=1,2,3,4)表示第i个空气弹簧的承载力;fj(j= 1,2,3)表示第j个辅助支撑力;Xi、Yj为空气弹簧的位置坐标;xi、yj为辅助支撑的位置坐标(表1)。自动充气调平控制策略以空气弹簧充气的开关信号为输入量,辅助支撑力 fj为输出量。用工控机控制空气弹簧的充气过程,从而控制空气弹簧的承载力 Fi,进而控制辅助支撑力fj:据此策略逐渐增加 Fi,直至所有 fj为0。

表1 辅助支撑与空气弹簧安装位置Table 1 Location of the auxiliary supports and air springs
由式(1)可知,自动调平控制系统是一个输入输出相互干扰的系统,每个空气弹簧承载力的变化对所有刚性辅助支撑均有影响;另外,空气弹簧的承载力受内部气压、空气压缩机气压、连接气路组件的影响较大,即空气弹簧的承载力控制是一个时延的、非线性时变系统:两方面的影响决定了空气弹簧自动调平过程难以用数学模型准确描述。考虑到基于数学模型的经典控制方法并不适用于此系统,本文提出了一种判断型开关控制方法:即以力传感器值作为判断依据,控制气路阀门的开闭,以实现向空气弹簧充气。
2.2 调平策略
按照调平流程对平台进行调平。在粗调阶段,对精度要求不高,因而4个空气弹簧可同时充气以缩短调平时间。精调阶段采用空气弹簧逐一充气策略,将多输入多输出(MIMO)控制问题转化为单输入多输出(SIMO)控制问题。
精调阶段需要确定每一时刻进行充气的空气弹簧序号。为此,将式(1)变换为
于是,每个空气弹簧的承载力对刚性辅助支撑力的影响即为
结合表1,计算结果见表2。

表2 空气弹簧承载力对辅助支撑力的影响Table 2 Influence of auxiliary supporting forces on air springs’ forces
由表2知,3号空气弹簧承载力对2号辅助支撑力影响最大。为区分1号、2号空气弹簧对1号辅助支撑的影响,加入附加条件:1号空气弹簧受1号、3号辅助支撑影响最大;2号空气弹簧受1号、2号辅助支撑影响最大。因此,精调阶段需充气的空气弹簧编号及条件为:
2.3 调平控制
空气弹簧的自动充气按时间分为2个阶段:4个空气弹簧连续充气(粗调);单个弹簧充气(精调)。为保证后者调平精度,气路的非线性和时延性需要加以考虑。在气路系统充气关闭的瞬间,气泵端与空气弹簧端的压差不可忽略,而连接气泵与空气弹簧的气管中气压处处不同[9,13],因而充气关闭后,气管内的气体仍在流动,导致空气弹簧的充气过程具有时延性,且延迟时间与压差、气管长度、气管横截面积有关。针对气路的时延性,本文的自动调平精调阶段采用脉冲充气法,即充气一段时间后稍加停滞,稳定后再次充气,如此循环,直至调平结束。综合了调平策略和调平控制策略的自动调平控制流程如图3所示。
开启阀门充气后,经连续充气,当辅助支撑力最大值达到阈值Fα,则开启脉冲充气,直至辅助支撑力最大值达到阈值Fβ,停止充气。其中,Fα决定调平快慢,Fβ决定最终调平精度。
2.4 调平精度
本平台最终调平精度有2个衡量值:力传感器数值和作动腿位移误差。为直观表示调平精度,针对Hexapod构型,借助雅可比矩阵将6个作动腿的位移误差换算为上平台六自由度误差。Hexapod平台的雅可比矩阵反映的是 6个作动腿的速度与上平台六自由度速度的映射关系[14]:
式(4)左边为上平台平动及转动速度,右侧 Vlk为6个作动腿的运动速度;式(5)中 e1,…,e6为各作动腿单位矢量(图4)。
6个作动腿由标准位置运动微小距离时,式(4)和式(5)中各参量可近似看作常量,因而式(4)也可写作
3 调平试验与结果
3.1 试验装置
本文试验对象是 Hexapod多自由度激振平台的气撑系统,其装置如图5所示。
空气弹簧的气路部分由空气压缩机、油水分离器、电磁阀、气控单向阀、节流阀和气管组成。继电器连接了工控机的数字输出端,可用来控制气路开闭。
电路部分由力传感器的信号调理器、A/D转换卡、工控机和数字输出端组成。力传感器信号经信号调理器转换为电压信号后,经过 A/D转换卡进入实时系统,然后通过控制程序输出至数字输出端,控制继电器开闭以完成气路充气。
气撑系统空载时的负载重量约为200 kg,重心在上平台几何中心处。
3.2 试验参数设置
试验中,针对不同气管长度(2 m、10 m),采用了不同的控制参数。
2 m 气管试验中,设置脉冲充气阈值Fα为-10 kg,停止充气阈值Fβ为-3 kg,而脉冲信号宽度为2 s,周期为6 s;10 m气管试验中,设置脉冲充气阈值Fα为-40 kg,停止充气阈值Fβ为-10 kg,同时脉冲信号宽度为2 s,周期为15 s。2次试验的控制系统采样时间均为1 s。
3.3 试验结果
2 m气管试验中,开启自动充气后,力传感器测量数据整体逐步上升,如图6所示。0~3 s,4个空气弹簧同时充气,但充气速度并不一致,平台向2、3号刚性辅助支撑倾斜,导致1号辅助支撑力下降;3 s后,调平经历连续充气阶段与脉冲充气阶段,平台姿态与位置经过大幅度调整与小幅度修正,直至140 s,自动调平完成。
调平结束后,3个力传感器数值分别为-0.020、 2.544、0.294 kg,6个作动腿的最大位移误差在±0.5 mm范围内,利用Hexapod平台的雅可比矩阵换算得到平台姿态误差,其中3个平动位移误差(x,y,z)在±0.3 mm范围内,3个转动位移误差(Rx,Ry,Rz)在±0.7 mrad范围内(见表3)。
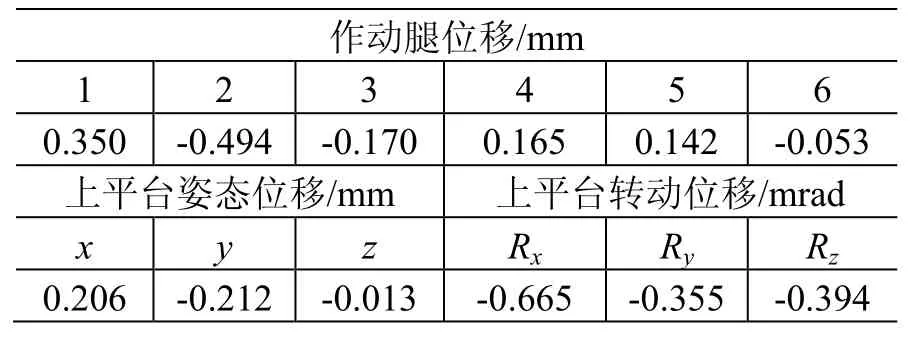
表3 自动调平精度Table 3 Automatic leveling accuracy
10 m气管试验中,力传感器测量数据如图7所示。0~20 s,力传感器数据几乎无变化,证实了长气管延时性较强;20~123 s,力传感数据稳步上升,直至调平控制结束。123 s后,气管滞后特性致使空气弹簧承载力上升,于210 s前后趋于稳定。
4 结论
本文针对Hexapod微激振平台负载重量大、作动器输出力小的特点,设计并研制了专门的气撑系统调平,通过方案论证和试验结果可得出以下结论:
1)以空气弹簧作为主要支撑元件的多点气动支撑方案简单可行,可以实现负载重量的卸载,并可同时保证平台的位置与姿态在所有自由度上的精度。
2)采用连续充气与脉冲充气相结合的自动充气方案,可以解决自动调平控制中的两大问题:柔性支撑与刚性支撑之间的力耦合问题;气路控制中的非线性和时延性问题。
3)气撑系统空载状态下,自重为200 kg的平台的自动调平可在140 s内完成,且平台的6个作动腿位移误差不超过1 mm,满足工程应用的要求,验证了调平策略的有效性。
(References)
[1]万夏琪, 沈斌琦, 郝夏影.悬吊安装与空气弹簧支撑安装的激振机激励方式对比[C]//第十四届船舶水下噪声学术讨论会.重庆, 2013
[2]陈顺平, 梅德庆, 陈子辰.超精密隔振平台的广义预测控制系统仿真分析[J].中国机械工程, 2004, 15(1): 66-68 CHEN S P, MEI D Q, CHEN Z C.Simulation study of generalized predictive control of ultra-precision vibration isolation platform[J].China Mechanical Engineering, 2004, 15(1): 66-68
[3]卢颖, 王勇亮, 孙方义, 等.气悬浮支撑系统在六自由度电动运动平台上的应用研究[J].液压与气动, 2015(2): 120-122 LU Y, WANG Y L, SUN F Y, et al.Air-suspending sustentation system for 6-DOF electric motion platform[J].Chinese Hydraulics & Pneumatics, 2015(2): 120-122
[4]凌轩, 曹树平, 朱玉泉, 等.基于模糊自适应控制的四点支承液压平台自动调平方法[J].机床与液压, 2007(12): 84-86 LING X, CAO S P, ZHU Y Q, et al.Fuzzy self-adapting automatically leveling method for four supports hydraulic platform[J].Machine Tool & Hydraulics, 2007(12): 84-86
[5]倪江生, 翟羽建.四点式液压平台[J].液压气动与密封, 1995(2): 41-44
[6]FACCHINETTI A, MAZZOLA L, BRUNI S A S.Mathematical modelling of the secondary airspring suspension in railway vehicles and its effect on safety and ride comfort[J].Vehicle System Dynamics, 2010, 48(48): 429-449
[7]BRUNI S, VINOLAS J, BERG M, et al.Modelling of suspension components in a rail vehicle dynamics context[J].Vehicle System Dynamics, 2011, 49(7): 1021-1072
[8]满楠, 李东升.空气弹簧隔振地基自动调平系统研究[J].液压气动与密封, 2010, 30(1): 25-28 MAN N, LI D S.Research of air spring vibration isolation foundation automatic leveling system[J].Hydraulics Pneumatic & Seals, 2010, 30(1): 25-28
[9]满楠, 禹静, 李东升, 等.空气弹簧隔振平台调平精度影响因素分析[J].计量学报, 2009, 30(增刊1): 68-71 MAN N, YU J, LI D S, et al.Leveling precision analysis of the air spring vibration isolation platform[J].Acta Metrologica Sinica, 2009, 30(Sup 1): 68-71
[10]卜文俊, 李尉, 朱海潮, 等.空气弹簧隔振系统姿态模糊控制研究[J].噪声与振动控制, 2006, 26(4): 40-44 BU W J, LI W, ZHU H C, et al.Study on fuzzy control of the posture of the air spring vibration-isolation system[J].Noise and Vibration Control, 2006, 26(4): 40-44
[11]卜文俊, 单树军, 胡宗成.基于模糊控制的超静定、多变量耦合空气弹簧隔振系统姿态控制[J].振动与冲击, 2007, 26(11): 174-177 BU W J, SHAN S J, HU Z C.Attitude control of statically indeterminate and multivariable coupling air spring vibration isolation system based on fuzzy controller[J].Journal of Vibration and Shock, 2007, 26(11): 174-177
[12]黄舟, 黄海.六自由度振动台台体结构优化设计研究[J].航天器环境工程, 2015, 32(5): 560-565 HUANG Z, HUANG H.Structural optimization design of 6-DOF shaker’s table[J].Spacecraft Environment Engineering, 2015, 32(5): 560-565
[13]DOCQUIER N, FISETTE P, JEANMART H.Multiphysic modelling of railway vehicles equipped with pneumatic suspensions[J].Vehicle System Dynamics, 2007, 45(6): 505-524
[14]吴培栋.Stewart平台的运动学与逆动力学的基础研究[D].武汉: 华中科技大学, 2008
(编辑:肖福根)
Automatic leveling of Hexapod micro-vibration system supported by air springs
GUAN Ruixue1, HUANG Hai1, HUANG Zhou2,WANG Haiqiang3
(1.School of Astronautics, Beihang University, Beijing 100191, China; 2.Institute of Systems Engineering, China Academy of Engineering Physics, Mianyang 621999, China; 3.Institution of Telecommunication Satellite, China Academy of Space Technology, Beijing 100094, China)
The Hexapod micro-vibration system contains some self-contradictory technical specifications: the heavy load and the small order of vibration magnitude.In view of this fact, an automatic leveling pneumatic support system is designed for precisely unloading the dead weight and for the small order control of the actuators.The system consists of the four-point trapezoidal resilient mounting system with air springs when the system is in the work state, and the three-point stiff auxiliary mounting system for load support when the system is not in the work state.The automatic leveling control system has two features: the force coupling between the resilient mounting and the stiff mounting, and the non-linearity and the time-delay of the pneumatic control.To solve these two problems, an switch on-off control scheme including the continuous inflation and the pulse inflation is proposed.The experiment results show that the Hexapod system with a load of 200 kg can be automatically leveled within 140 s, and the displacement errors of the Hexapod’s six actuators are less than or equal to 1 mm.
Hexapod micro-vibration system; stiff combined mounting; air spring; automatic leveling; switch control
TP272
:A
:1673-1379(2017)01-0098-06
10.3969/j.issn.1673-1379.2017.01.016
关睿雪(1993—),女,硕士研究生,研究方向为气动平台调平;E-mail: guanruixuely@163.com。指导教师:黄 海(1963—),男,博士学位,教授,研究方向为飞行器结构优化,空间智能结构及其控制等;E-mail: hhuang@buaa.edu.cn。
2016-06-24;
:2017-01-15
关睿雪,黄海,黄舟,等.空气弹簧支撑的Hexapod微激振平台自动调平研究[J].航天器环境工程, 2017, 34(1): 98-103
GUAN R X,HUANG H,HUANG Z,et al.Automatic leveling of Hexapod micro-vibration system supported by air springs[J].Spacecraft Environment Engineering, 2017, 34(1): 98-103
猜你喜欢
环球时报(2022-04-28)2022-04-28 17:19:11
军事文摘·科学少年(2021年6期)2021-06-24 05:42:11
中国民间疗法(2021年5期)2021-06-09 09:21:08
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
机械工程与自动化(2020年4期)2020-08-25 02:06:58
江苏安全生产(2020年6期)2020-07-28 07:48:26
森林工程(2018年4期)2018-08-04 03:23:38
新高考·高一物理(2016年10期)2017-07-07 12:17:11
航天工业管理(2017年4期)2017-05-12 01:16:35
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30