
BDS总体最小二乘整周模糊度解算方法
2017-03-07 10:17徐爱功祝会忠杨秋实
导航定位学报 2017年1期
张 俏,徐爱功,祝会忠,2,高 猛,杨秋实
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.航天飞行动力学技术重点实验室,北京 100091)
BDS总体最小二乘整周模糊度解算方法
张 俏1,徐爱功1,祝会忠1,2,高 猛1,杨秋实1
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.航天飞行动力学技术重点实验室,北京 100091)
针对基于经典最小二乘的方法在BDS整周模糊度解算中只考虑观测向量误差而忽略了系数矩阵的误差的问题,研究一种模糊度快速解算的改进LAMBDA算法:利用总体最小二乘法改进LAMBDA算法搜索并确定双差整周模糊度。通过对LAMBDA算法和改进LAMBDA算法2种算法的数据处理结果进行统计分析,得出结论:总体最小二乘法能够显著减少BDS整周模糊度固定所需的时间,提高整周模糊度固定的成功率。
BDS;整周模糊度;LAMBDA;总体最小二乘
0 引言
北斗导航卫星系统(BeiDou navigation satellite system,BDS)是中国自主建设、独立运行,与世界其他卫星导航系统兼容共用的全球卫星导航系统[1]。目前已经发射了25颗卫星(包括4颗试验卫星),其中10颗地球同步(geo-synchronous orbit,GEO)卫星、7颗倾斜地球同步轨道(inclined geo-synchronous orbit,IGSO)卫星及8颗中高度轨道(medium Earth orbit,MEO)卫星。BDS致力于向全球提供高质量的导航、定位和授时服务,包括授权服务和开放服务2种方式:开放服务是免费向全球提供定位、授时和测速的服务,定位精度10 m,授时精度10 ns,测速精度0.2 m/s[2];授权服务是为有高可靠、高精度卫星导航需求的用户提供系统完好性信息和定位、授时、测速、通信的服务。
实现BDS高精度定位的前提是应用载波相位观测数据[3];而整周模糊度的准确确定是利用BDS相对定位方法进行高精度动态定位的首要条件。模糊度固定是全球卫星导航系统(global navigation satellite system,GNSS)高精度导航定位的关键问题,也是GNSS研究领域中多年来的热点问题。国内外学者对整周模糊度的确定作了大量研究,并取得了一些成果[4-14]。文献[15]提出的LAMBDA方法是国际公认的理论上最为严密、模糊度解算效率最高的方法,它首先基于整数高斯降相关原理,通过整数变换降低了模糊度之间的相关性,减少了候选整数模糊度的个数,提高了模糊度的解算效率。随后许多学者提出不同的模糊度降相关方法,如文献[16]提出了逆整数Cholesky分解方法,并初步比较了多维高斯整数降相关、逆整数Cholesky分解、LLL格基规约3种方法的性能。但在快速定位时,基于最小二乘导出的法方程求解时,通常假设系数阵没有误差或不考虑系数阵的误差;然而实际情况中移动站坐标值是估计值而不是准确值,所以系数矩阵中是存在误差的。
针对系数矩阵存在误差的问题,本文研究了一种模糊度快速解算的改进LAMBDA算法。该算法基于总体最小二乘原理,对双差观测系数矩阵加上一个系数误差矩阵,然后在系数误差矩阵未知的情况下快速准确地求出坐标改正数以及整周模糊度。
1 总体最小二乘法改进LAMBDA算法
1.1 总体最小二乘法方程
由于双差组合观测值具有消除接收机中误差和卫星钟差,大大削弱卫星轨道误差、电离层延迟误差、对流层延迟误差等误差影响的优点,所以本文采用双差模型进行整周模糊度解算。双差载波相位观测方程为

(1)

若流动站的近似坐标为(X0,Y0,Z0),将上式用泰勒级数展开的双差载波相位观测方程为
λΔφi=-(li-l0)Vx-(mi-m0)Vy-
(ni-n0)Vz-λΔNi+Δρi。
(2)
由于宽巷观测值的波长为84.7cm,因而很容易准确确定其整周模糊度,并且宽巷组合又保证了整周模糊度的整数性质;但由于测量噪声较大,所以宽巷观测值一般并不用于最终的定位。本文采用改进的LAMBDA算法先确定宽巷浮点模糊度,然后利用已确定的宽巷浮点模糊度求出流动站的坐标改正数,最后利用坐标改正数求出L1的整周模糊度的方法确定整周模糊度。宽巷的观测方程为
(3)
式中:φw是宽巷观测值;φ1是载波L1的载波观测值;φ2是载波L2的载波观测值。Δφw是单差的宽巷观测值;下标0代表基准站;下标0i代表其他卫星;下标00代表基准站基准卫星;下标1代表流动站;下标1i代表流动站基准卫星;下标10代表流动站其他卫星;Δφw为双差宽巷观测值。
将宽巷双差带入式(2)中得到宽巷的双差观测方程为
λwΔφwi=-(li-l0)Vx-(mi-m0)Vy-(ni-n0)Vz-λΔNwi+Δρi。(4)
式中:λw为载波宽巷的波长,大小约为84.7 cm;ΔNwi为宽巷浮点模糊度。
ΔliVx+ΔmiVy+ΔniVz+λwΔNwi=Li。
(5)
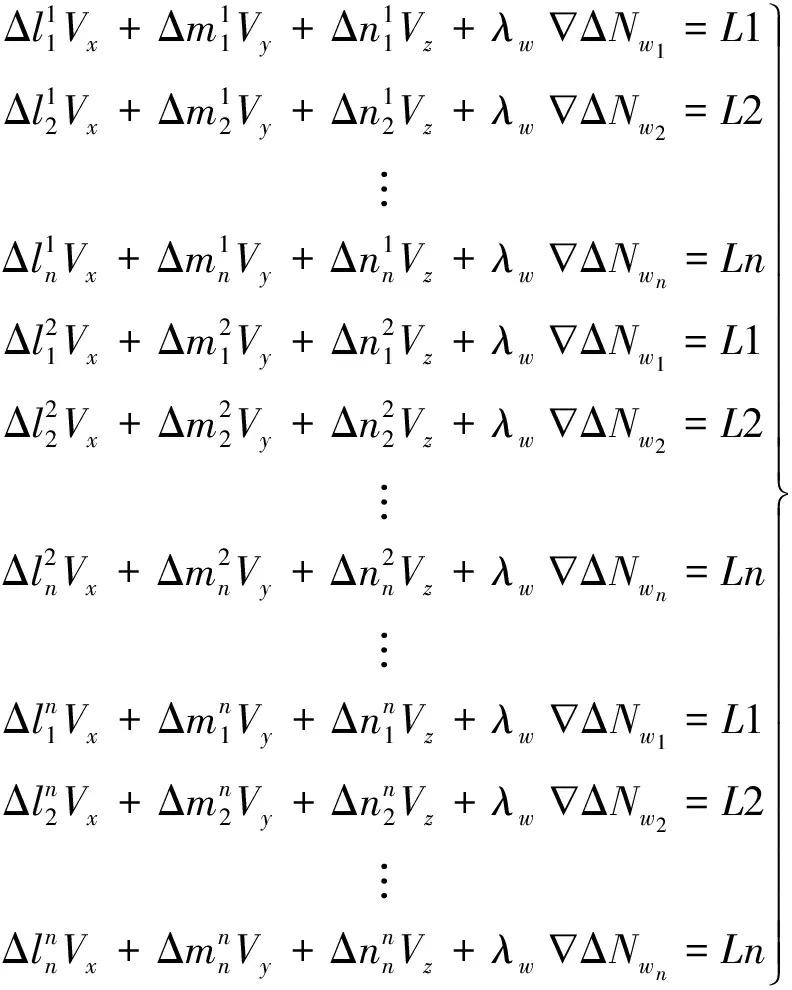
由式(5)可知:Li为已知;Vx、Vy、Vz和ΔNwi为未知;未知数个数为(3+n)个。其中n为除基准卫星和卫星高度角小于15°外的基准站接收机和流动站接收机共同观测到的卫星个数。则可以列出方程组为
(6)
式中:上标代表历元数;下标代表卫星。式(6)可以用矩阵的方式表示为

(7)
式中:上标代表历元数;下标代表除基准卫星外的其他共同观测卫星。式(7)可以表示为
AX=L。
(8)
在测量数据处理中,最常用的模型为Gauss-Markov模型,若仅考虑观测向量误差,其误差方程式为
V=AX-L,
(9)
其最小二乘准则为
VTPV=min,
(10)
其中未知参数X的最小二乘估计为
X=(ATPA)-1ATPL=N-1ATPL。
(11)
式中:P为权阵;N=ATPA,是法方程系数矩阵。
Gauss-Markov模型采用最小二乘方法对误差方程式进行求解,其假设系数矩阵A不含误差,偶然误差仅存于观测向量L中。当系数矩阵A存在误差、扰动时,从统计观点看,最小二乘估值将是有偏的,不再是最优的,而且偏差的协方差将随着ATPA的噪声误差作用而增加。
由于式(8)A矩阵中
(12)
而
(13)
式中的X0、Y0和Z0为流动站坐标的估计值,不是真实值;所以系数矩阵A是存在误差的。
总体最小二乘的基本思想可以归纳为:不仅观测量L含有观测误差ΔL,系数矩阵A也存在扰动或误差ΔA。在总体最小二乘中,考虑的是线性方程
(A+ΔA)X=L+ΔL
(14)
的求解。
1.2LAMBDA算法原理
LAMBDA算法是从概率角度出发,以离散搜索方式求解

(15)
1.3 平差解算
目前总体最小二乘的解法有总体最小二乘SVD解法、总体最小二乘最小奇异值解法、总体最小二乘Euler-Lagrange逼近法和总体最小二乘迭代法等。本文采用总体最小二乘Euler-Lagrange逼近法进行最小二乘求解。具体流程如图1所示。
图中:X为求出的流动站的位置坐标;X0为上一次迭代求出的位置坐标;ε为一个无限小的数,可以设为0.000 01。
总体最小二乘Euler-Lagrange逼近法公式为:
(16)
(17)
(18)
其中的上标“∧”代表“未知数”。
单位权方差以及参数的协方差矩阵为:

(19)

(20)
式中Im为m行m列的单位阵。
将求出的协方差矩阵代入到LAMBDA算法中求出宽巷的浮点模糊度,模糊度已知后将
Li=Li+λwΔNi
(21)
代入式(6)中得

(22)
则可解出Vx、Vy和Vz,将Vx、Vy、Vz代入到式(2)中可得到载波的浮点模糊度,取整得到整周模糊度。
2 算例与分析
本文使用2013-10-16的BDS实测数据进行算法检验,基线长度为1km,采样间隔为1s,截止高度角为15°。选取BDS的6号卫星为基准,可获得7个整周模糊度值。通过全部数据解算得到的模糊度解为[-71,-167,-127,-239,-241,-149,-240],宽巷的模糊度为[-9,36,29,54,40,64,49],以此作为整周模糊度的真实值。为了更好地展示模糊度固定变化趋势,从2 000个历元中截取前40个做出4幅图,如图2~图5所示,其余历元全部固定。
从图2中可以看到,常规的LAMBDA算法固定宽巷模糊度时用了20个历元,固定前与固定后的模糊度差值的绝对值的最大值在1 200左右;图3中改进LAMBDA算法固定宽巷模糊度时用了6个历元,前6个历元的模糊度与真实的整周模糊度差的绝对值都在70以内;图4中利用常规LAMBDA算法固定的L1整周模糊度用了20个历元,整周模糊度固定前与固定后的差值超过了6 000;图5中,改进的LAMBDA算法固定L1的整周模糊度用了6个历元,整周模糊度固定前与固定后的差值在550以内。通过图2和图3、图4和图5的对比可以发现:通过总体最小二乘法改进后的LAMBDA算法固定的整周模糊度明显比一般的LAMBDA算法波动小得多,而且固定所需的历元数也要比相同情况下没有改进的LAMBDA算法要少。同时可以发现:宽巷的模糊度变化趋势和L1的模糊度变化趋势完全相同,只是数值不同。因此可以得到结论:改进后的LAMBDA算法在模糊度固定方面所需的历元数要比一般LAMBDA算法的少,节约了模糊度固定时间。
为了更直观地对模糊度固定所需历元数进行分析,在观测数据中随机选出5组数据,每组30个历元,通过计算得到如表1所示结果。

表1 模糊度固定所需历元个数
从表1中可以看出,在模糊度固定所需历元个数方面,改进后的LAMBDA算法明显优于一般的LAMBDA算法,初始化时间明显降低。
为了将改进算法的BDS系统动态定位结果更直观地展现出来,将解算的定位结果与精确值做差后得到东方向(E)、北方向(N)、高程方向(U)等3个方向的坐标偏差,如图6所示。
从图中可以看出:东方向精度基本保持在1 cm以内;北方向稍差一些,在1 cm左右;高程方向精度保持在1 cm以内。
3 结束语
本文提出了一种基于总体最小二乘的模糊度快速解算方法:首先通过总体最小二乘求出宽巷的浮点模糊度;然后将其代入到载波观测方程中,求出载波的浮点模糊度;最后用取整的方法获取最终的载波整周模糊度。通过实验表明,基于总体最小二乘的模糊度固定方法在模糊度固定所需时间和模糊度固定准确率方面均有提高。由于经典最小二乘在BDS整周模糊度解算中只考虑观测向量误差而忽略了系数矩阵的误差,本文研究的基于总体最小二乘的改进LAMBDA算法成功地解决了系数矩阵存在误差的问题。但文中只是将求宽巷浮点模糊度时的最小二乘法改为总体最小二乘方法,目的是能够清晰地比较总体最小二乘改进的LAMBDA算法和原LAMBDA算法的模糊度固定时间和准确率,而在参数估计时没有应用该方法,今后的研究将在参数估计时也应用总体最小二乘法,进而比较定位精度的情况。
[1] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6.
[2] SHI Chuang,ZHAO Qile,LI Min,et al.Precise orbit determination of BeiDou satellites with precise positioning[J].Science China Earth Sciences,2012,55(7):1079-1086.
[3] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):743-748.
[4] RIZOS C.Network RTK research and implementation a geodetic perspective[J].Journal of Global Positioning Systems,2002,1(2):144-150.
[5] 高星伟,刘经南,葛茂荣.网络RTK基准站间基线单历元模糊度搜索方法[J].测绘学报,2002,31(4):305-309.
[6] 唐卫明,刘经南,施闯,等.三步法确定网络RTK基准站双差模糊度[J].武汉大学学报·信息科学版,2007,32(4):305-308.
[7] 高星伟,过静珺,秘金钟,等.GPS网络差分方法与实验[J].测绘科学,2009,34(5):52-54,41.
[8] 高星伟.GPS/GLONASS网络RTK的算法研究与程序实现[J].测绘文摘,2003(2):8.
[9] BLEWITT G.Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2000 km[J].Journal of Geophysical Research,1989,94(8):10187-10203.
[10]DONG D N,BOCK Y.Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in California [J].Journal of Geophysical Research,1989,94(4):3949-3966.
[11]BLEWITT G.An automatic editing algorithm for GPS data[J].Geophysical Research Letters,1990,17(3):199-202.
[12]CHEN H Y,RIZOS C,HAN S.An instantaneous ambiguity resolution procedure suitable for medium-scale GPS reference station network[J].Survey Review,2004,37(291):396-410.
[13]DAI L,WANG J,RIZOS C,et al.Predicting atmospheric biases for real-time ambiguity resolution in GPS/GLONASS reference station networks[J].Journal Geodesy,2003,76(11/12):617-628.
[14]HU G,ABBEY D A,CASTLEDEM N.An approach for instaneous ambiguity resolution for medium-to longrange multiple reference station networks[J].GPS Solutions,2005(9):1-11.
[15]TEUNISSEN P J G,DE JONG P J,TIBERIUS C C J M.The least-squares ambiguity decorrelation adjustment:its performance on short GPS baselines and short observation spans[J].Journal of Geodesy,1997,71(10):589-602.
[16]XU P.Random simulation and GPS decorrelation[J].Journal of Geodesy,2001,75(7):408-423.
Method of BDS total least squares integer ambiguity resolution
ZHANGQiao1,XUAigong1,ZHUHuizhong1,2,GAOMeng1,YANGQiushi1
(1.School of Geomatics,Liaoning Technical University,Fuxin,Liaoning 123000,China; 2.Key Laboratory of Research and Technology on Aerospace Flight Dynamics,Beijing 100091,China)
Aiming at the problem that the method based on classical least squares considers only the error of the observation vectors while ignoring that of the coefficient matrix in the solution of BDS integer ambiguity,the paper proposed an improved LAMBDA algorithm with rapid ambiguity resolution:the total least squares method was used to improve the serarch of LAMBDA algorithm and determine the double difference integer ambiguity.Finally,the comparative analysis between LAMBDA algorithm and the improved LAMBDA algorithm indicated that the total least squares method could significantly reduce the required fixing time of BDS integer ambiguity,so as to increase the success rate of fixing integer ambiguity.
BDS;integer ambiguity;LAMBDA;total least squares
2016-05-23
国家高技术研究发展计划(863计划)项目(2014AA123101);辽宁省高等学校创新团队项目(LT2015013)。
张俏(1991—),男,辽宁阜新人,硕士生,研究方向为卫星导航与定位。
张俏,徐爱功,祝会忠,等.BDS总体最小二乘整周模糊度解算方法[J].导航定位学报,2017,5(1):65-69,80.(ZHANG Qiao,XU Aigong,ZHU Huizhong,et al.Method of BDS total least squares integer ambiguity resolution[J].Journal of Navigation and Positioning,2017,5(1):65-69,80.)
10.16547/j.cnki.10-1096.20170114.
P228
A
2095-4999(2017)01-0065-06
猜你喜欢
中学生数理化(高中版.高一使用)(2021年2期)2021-03-19
导航定位学报(2020年6期)2021-01-05
今日农业(2020年23期)2020-12-15
全球定位系统(2019年4期)2019-08-30
中国外汇(2019年6期)2019-07-13
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
中学生数理化·高一版(2017年2期)2017-04-25
科技创新与品牌(2016年1期)2016-05-04
