交流电动机电气传动的控制方案
2017-03-04 19:44杨轶
科学与财富 2016年32期
杨轶
摘 要:随着我国经济水平的飞速发展,各行各业都得到了蓬勃的发展,尤其是电力电气技术的日益进步,这样就对交流电动机电气传动的效率提出了更高的要求。而本文主要对交流电动机电气传动所具有的变频器以及控制器进行了分析,并通过相关实例对几种不同类型的电动机电气传动所制定的控制方案进行研究,并提出合理化建议,提供给相关人士,供以借鉴。
关键词:交流电动机;电气传动;变频器
随着集成电路、科学技术领域的不断发展下,使电力电子技术也得到了蓬勃的发展,交流电动机中的电气传动在相关领域得到了普遍的认可,例如工业机器人、航天领域等方面都有所是涉及。对此,本文主要从变频器、控制器、几种交流电动机电气传动的控制系统几个方面进行分析,从而提出相关见解,为我国的经济建设做出贡献,提供给相关人士,供以借鉴。
1 变频器
变频器主要在以下两种逆变器中较为适合:一种是电压型逆变器;另一种是电流型逆变器。因为VSI的结构具有一定的简便性,不需要添加多余的主电路,在频繁加速、改变转向的地方较为适合,并且有着较高的稳定性。因此,需要在高性能的场合中较为适合,人们通常选择VSI,倘若具备再生能力的情况下,那么相关人员可能会对CSI进行考虑。通常情况下,诸多工业以及商业主要使用的是VSI,而输入带你呀的范围大概在100V~400V的范圍内。
其中,当相关人员在对电压型逆变器进行控制的时候,是将直流电压Vd进行固定,然后依赖于相应的脉冲宽度加以控制而形成的开关切换,并且做好详细的控制。因为控制手段以及软件技术的不断发展下,提出了各种类型的方案。
利用PWM控制,减小高次谐波损失。利用PWM控制,使特定的高次谐波最小。利用PWM控制,减小噪声。利用PWM控制,使电动机的转矩脉动最小。利用PWM控制,使有效电压利用率最佳。
通常,在工业上通用的电压型逆变器采用以下方法控制:脉冲模型法将对应于各个相位的电压数据,按每个模型存贮在ROM等记忆器件上,这种方法的电压精度和相位(频率)精度都有限。正弦波近似三角波比较法是一种最有代表性的PWM法,为了输出和放大与三相电压指令值相当的电压,与三角波的大小进行比较来决定开关切换点。输出电压波形在一周期内的平均值与它的指令值成比例,也可获得送人电动机的线电压,三角波的调制频率为几KHz。在高性能的感应电动机传动中,主要问题是控必须考虑以下几点:确定控制策略;检测;感应电动机瞬态性能的建控制硬件。
2 控制器
在交通电动机电气传动系统中,相关人员一般采取的是转速闭环控制,并且使用转速偏差来对动态转矩进行调整。为了进一步对电磁转矩进行控制,合理的使用电动机铁芯,通过相应电流的作用力下,最大程度形成最大的电磁转矩,然后将系统的流程不断加快,这时相关人员需要对转矩以及磁通进行控制。(1)在基速以下保持磁通(或磁链)恒定,通过控制电枢电流或定子电流的转矩分量来实现控制转矩。(2)在基速以上采用弱磁控制,引人除法节环来消除电机内部的乘法作用,实现转矩与磁通(或磁链)的解藕控制。(3)利用转矩模型推算出动态转矩实际值,采用转矩闭环控制。如控制定子磁链的幅值以及该矢量相对于转子磁链的夹角,也可实现控制转矩。根据转矩和定子磁链实际值与给定值的偏差来直接确定PWM逆变器开关信号,用定子磁链来计算电磁转矩,不足之处是会带来转矩脉动,限制了系统的调速范围。
3 感应电动机的微机直接转矩控制系统
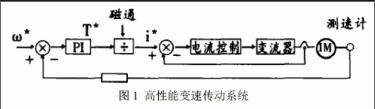
3.1 高性能变速传动通用控制器
图1所形成的控制原理为:速度误差达到PI控制器的时候,进而可以得到一个和电动机预期值成比例的形式进行输出。因为转矩和磁通以及相应电流之间呈现出正比的趋势,所以转矩所具有的参数值除以磁通就能够获得相应的电流参考值。当速度不高于额定值的时候,那么磁通就要处于恒定的状态,这样电流才可以达到理想的数值正比,接着该电流所获得的数值将输送到电流控制内环中。该控制形式大多数是采取多环路控制的,而嵌套一些反馈环,相应的相应速度比其他外环的速度大。
3.2 感应电动机的微机直接转矩控制系统
因为逆变器组成的电源模式不属于纯正弦的,所以相关人员在进行调速的过程中,不能确保气隙磁通达到恒定的效果,采取相应的理论致使可以对主磁通进行跟踪,并且当主磁通在速度的领域中可以基本处于恒定的状态。平滑圆周因为和多边形几乎一样,当多边形分割的愈多,那么就会越接进圆形的形态。
相关人员通过使用相关的平滑圆周的形式可以达到微机控制的目的。例如使用等12边多边形接近平滑圆周,并且其中有6个空间磁通矢量所存在的方向和相关矢量的方向保持一致,而另外六个传送和相应的矢量方向存在一定的差异性。显而易见,空间非零电压矢量能够对顺序进行编制,并且会对实磁通矢量进行跟随。
因为控制的主要用途是为了将相应的圆周的弧进行跟踪,当前所使用的一种方案是将每一个带有伪磁通矢量可以选择适当的轨迹,而且这些轨迹和相应的矢量中心是处于对称的状态,只有这样才能够使主磁通幅值所产生的波动范围能够实现相应额定值的百分之九十六到百分之一百零四的范围内。
对于数字控制技术来说,可以构成分别存贮空间非零电压矢量和它的时宽两种表格,由控制程序存取选定的电压矢量和时宽。当时宽保持足够长时,微机在可用的时间内实现弱磁运行。通过选择1个空间非零或零电压矢量和选择规定的时宽,则可实现直接转矩控制。改变零空间电压矢量数和非零空间电压矢量数的比值,就能调节滑差角频率。该系统由16位PC机、接口电路和外围电路构成。所有电压、电流和磁通都由瞬时空间矢量表示,而且每一瞬时空间矢量都分解为D轴变量和Q轴变量。该系统不需要电压传感器,其电动机的端电压Vd,Vq可以由非零空间电压矢量V,(Sa,Sb,Sc)推导出来,该计算值可存放在表中,一旦选定了1个非零空间电压矢量,控制程序就访问该表。在控制程序中,需编制三张表:空间非零电压矢量表;V1(Sa,Sb,Sc)的时宽表,Vd,Vq值表。这三张表均与V1(Sa,Sb,Sc)有关,但字节数不同,因而不同的表需设置不同的计算器。
结束语
通过以上内容的论述,可以得知:本文例举了几种类型的交流电动机电气传动所制定的控制方案,并且做出了详细分析,这些控制方案都能够从不同方面呈现出电气传动的一些特诊。因为IGBT、IIGCT等功能良好的功率器件的大量涌出,从而使变频主电路呈现出多样化的特点,并且致使控制电路不断的进步。随着我国科学技术、信息技术等方面的飞速发展下,在未来的发展中一定会产生诸多恰当的控制方案。
参考文献
[1]吴金友,李艳丽,范蟠果.无刷直流电机控制系统在电动自行车上的应用[J].电机与控制应用,2008(01).
[2]蒋慧略,周忠海,蒋慧广,廉月仙.数字PID控制的改进算法[J].中国水运(下半月),2008(06).
[3]阚蓉.电气传动技术的发展现状及趋势[J].黑龙江科技信息,2008(20).
[4]张英婵,李鹏霞,贾卫东.三辊定径机调试中的故障排除[J].重型机械科技,2007(02).
[5]祝龙记,王汝琳.直接转矩控制在带式输送机电气传动中的应用研究[J].煤炭学报,2004(03).
猜你喜欢
流程工业(2022年11期)2022-11-30
防爆电机(2020年3期)2020-11-06
测控技术(2018年5期)2018-12-09
电子制作(2017年7期)2017-06-05
电机与控制应用(2015年7期)2015-03-01
电气传动自动化(2014年6期)2014-03-20
自动化博览(2014年12期)2014-02-28
机电信息(2014年27期)2014-02-27
河南科技(2014年18期)2014-02-27
河南科技(2014年11期)2014-02-27