
基于分布式管理的水下专用测控系统
2017-03-02 03:17刘敬彪
杭州电子科技大学学报(自然科学版) 2017年1期
刘敬彪,厉 轲
(杭州电子科技大学电子信息学院,浙江 杭州 310018)
基于分布式管理的水下专用测控系统
刘敬彪,厉 轲
(杭州电子科技大学电子信息学院,浙江 杭州 310018)
针对新型海底取样设备对运行过程稳定性和测控多样性需求的提升,设计了一种基于分布式管理的水下专用测控系统.系统通过功能划分将整体转化为一组特定的功能模块,各模块搭载隔离CAN收发器并以板卡接入的方式连接到CAN总线网络中,以此建立以主控板卡为核心的集中管理、分散操作的集散式测控结构.测控结构良好的接入能力与扩展性使得系统能够便捷地实现功能的扩充.系统拥有自检能力,能实时监测自身电能与外部系统控制状态.测试结果表明,系统能稳定高效地运行并完成各项测控功能.
分布式管理;测控;板卡接入;可扩展性;自检
0 引 言
水下取样设备是开展海洋地质及环境科学研究、海洋矿产资源勘探和海底工程地质勘察所必备的关键技术装备[1].随着设备不断改进,对其测控系统功能的多样性和稳定性提出了更高的要求.传统测控系统如模拟仪表测控系统,测控分散、精度低且易受到干扰;集中式数字测控系统可实现统一调度与管理,但其对核心单元的处理能力要求极高,在复杂的环境下无法高效运作,系统容错能力与扩展能力较差[2].本文设计的基于分布式管理的水下专用测控系统很好地弥补了这些不足.系统由测控级和监控级组成多级测控,其核心理念包括集散式测控、分级管理、灵活组态与配置等.相较于传统测控系统,其将单个分立的测控系统变成网络节点,并以主控节点为管理,以CAN总线为纽带,将它们连接成为可以实现信息互通、共同完成测控任务的分布式测控系统.CAN总线能够保证节点间数据通信的实时性,且其拥有良好的容错控制能力,保证了系统的灵活性与可靠性[3-4].
1 系统设计
系统整体结构如图1所示.系统分为水下测控系统和甲板监控系统.水下测控系统采用板卡接入的设计方式,其中主控板卡作为系统的核心处理单元,负责水下系统的运行管理,实现数据的交互.电源管理板卡、继电器控制板卡和采集板卡组成基本功能板卡.甲板监控系统包括监控上位机和甲板光纤通信机.水下系统与甲板系统之间采用光纤通信.系统工作原理如下:采集板卡负责模拟量和数字量采集,并将采集数据发送至主控板卡,由主控板卡负责预处理并上传至监控上位机,上位机完成数据最终处理;上位机的控制请求通过主控板卡解析并发送至继电器控制板卡,完成对外部系统的控制.主控板卡与上位机的数据交互采用串口通信,并提供了网络通信的条件以便系统后续深入优化.水下测控系统内部则采用基于CAN总线的分布式体系结构,各总线节点独立负责其各自的任务,从而减轻主控单元的工作负担,并能保证数据传输的实时性和可靠性[5].当需要增加功能板卡时,只需将其接入总线网络,即可便捷实现系统功能扩展.各板卡均搭载统一的隔离式CAN收发模块并配合隔离电源,为CAN控制器提供差分收发能力[6].
基于系统的灵活性和扩展性,扩展板卡的类别可以根据应用需求而定.例如,在水下传感器需求较多的场合,可添加采集板卡以扩展系统的采集功能;在机械系统复杂的场合,可添加继电器控制板卡以扩展系统的控制功能.
为实现系统自检,本系统在电源部分添加了电源管理功能,实时监测系统供电电能;在继电器控制部分应用闭环检测结构,向监控系统实时反馈控制状态与输出状态,增强了系统的可靠性与可维护性.
2 硬件设计
本文采用模块化的设计思想,将不同功能分解并集成到对应的功能板卡上,板卡以节点的形式接入CAN通信总线,建立分布式测控系统结构,在主控板卡的管理下,各板卡分工协作,互不干扰.硬件设计遵循通用性原则,各板卡均采用与主控系统同样的核心处理芯片,CAN收发控制采用相同的隔离收发器来设计[7].
2.1 主控管理
主控板卡作为系统的核心管理单元,除采集系统姿态数据以外,并不直接参与系统的对外控制和数据采集,这从很大程度上减轻了其负担.主控MCU采用STM32F407ZET6.该MCU采用Cortex-M4内核,最高主频可达168 MHz.主控系统以性能良好的主控MCU为基础,配置了丰富的外部资源,包括网口、以太网PHY芯片、外部SRAM、外部Flash、TF Card、六轴姿态测量模块.主控系统还提供了多路具有带大负载能力的供电输出,为外部摄像系统提供稳定可靠的电源,并且各路电源均通过光电隔离器以及并行输入/串行输出移位寄存器芯片实现电源检测.
2.2 电源管理
电源管理板卡分为整流滤波板卡和电能监测板卡.整流滤波板卡为系统提供直流供电电源,电能监测板卡的主要功能是检测交流电能,其采样电路在整流滤波板卡中提供.电源管理结构如图2所示.
电能监测板卡的核心是RN8209G电能计量芯片.芯片内部的集成处理单元对交流采样数据进行精确解析,高效地测量电路的有功能量和有功功率,且其内部的电源监控电路可以保证芯片在断电时也能可靠工作.应用高性能电能计量芯片实现电能自检,有助于技术人员及时定位和处理系统异常,提升系统的可靠性和安全性.
2.3 测控功能模块
2.3.1 继电器控制板卡
继电器控制板卡负责系统外部控制.水下作业离不开庞大而复杂的机械设备,机械设备执行操作需要电子控制系统提供支持.本系统通过控制该板卡上的多路继电器来驱动水下液压阀组,并由水下液压阀组来完成相应的外部机械设备的控制.另外,如水下寻址灯、摄像头、电源转换模块等设备的开关控制也可由该板卡负责执行.
针对传统继电器控制结构单向开环的弊端,分别在继电器控制端和输出端添加闭环检测结构.继电器控制电路结构如图3所示.
继电器控制端采用光耦隔离检测技术,可以有效避免外围系统对MCU造成的意外伤害.当MCU发送继电器控制信号时,检测电路将继电器控制端的电平状态反馈给MCU,从而帮助系统获取继电器的控制状态.由于设备的工作电流通常较大,系统采用线性电流传感器检测继电器输出端的电流值,以获取继电器所带外部负载的运行状态.
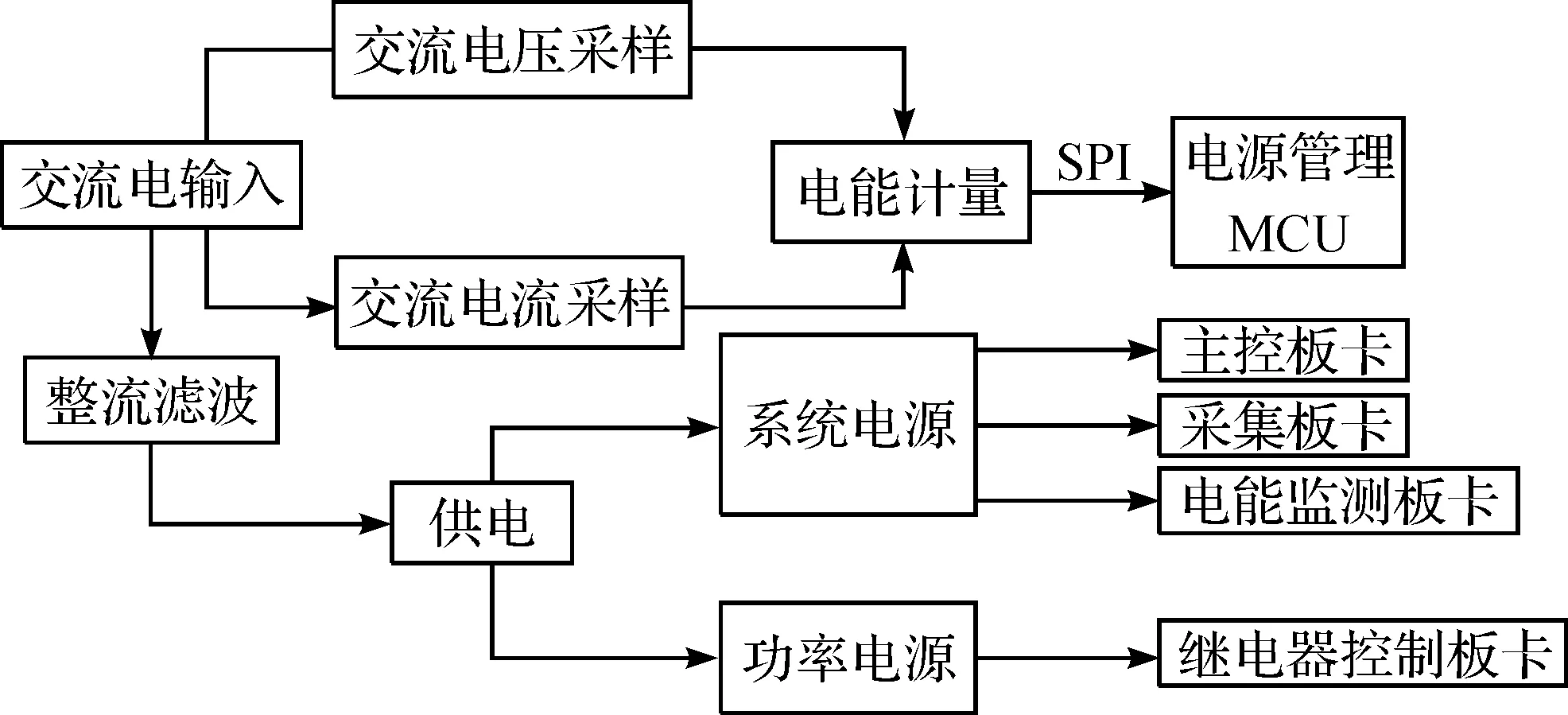
图2 电源管理结构
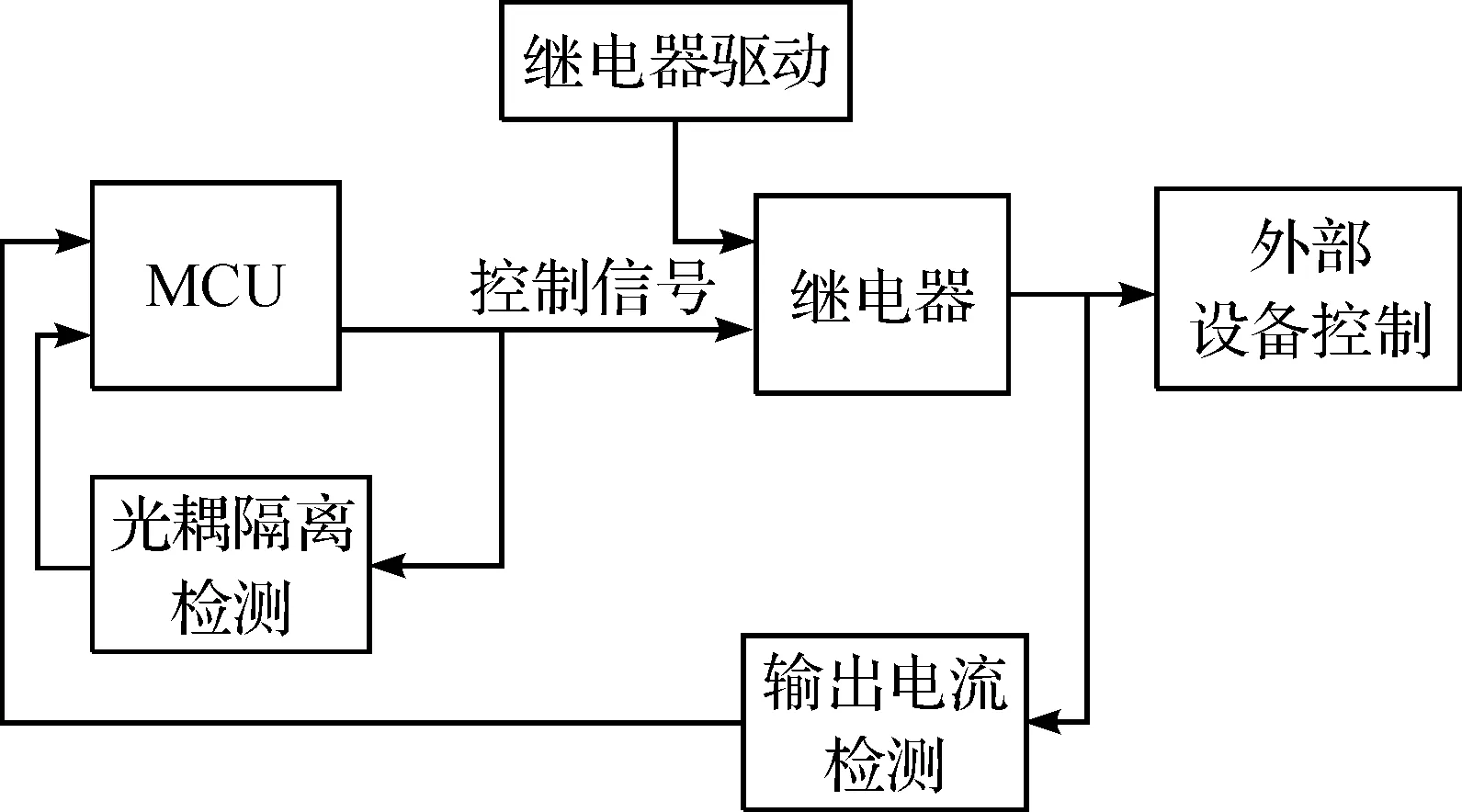
图3继电器控制结构
2.3.2 采集板卡
采集板卡分为模拟量采集板卡与数字量采集板卡,负责为各类水下传感器提供数据传输与处理接口.伴随着水下设备的复杂化与规模化,单点信息采集早已无法满足需求.针对大规模、分布式的水下设备,板卡集成了多通道信息采集系统以全方位监测设备运行状态.
常用的水下设备采集量包括姿态、位移、压力等模拟量,位置、转速等数字脉冲量以及温度、高度计数据等,这些采集量均来自不同类型的水下传感器.每类传感器的数量不一,因此系统设计了多路分压式隔离与非隔离模拟信号采集电路来处理多组采集数据,用户只需根据传感器不同对分压电路上的电阻值稍作修改即可实现采集功能,具备较好的通用性.其中在隔离采集电路应用低功耗隔离运放,能够在保证输出信号不衰减的同时有效屏蔽干扰信号,提升采集系统的可靠性和安全性.同样考虑到电路兼容性,采用光电隔离器配合MCU内部三态缓冲器实现多路数字量采集,减少了输入端干扰并保证系统安全[8].
2.4 系统扩展
利用CAN总线节点即插即用的特点,系统测控功能的扩展十分便捷.扩展板卡只需搭载统一的隔离CAN收发模块并加入通信总线中,并与其余各板卡遵循同样的协议,就能够与系统建立通信,对于系统原有的硬件电路无需做任何修改.
3 软件设计
3.1 主控系统软件设计
主控板卡作为水下通信网络的核心节点,负责水下系统运行管理以及与上位机通信.主控系统软件流程主要分为下行指令与上行数据的管理流程.主控系统软件流程如图4所示.其中串口发送请求标志位是在数据传输时序控制单元中设置的.数据传输时序控制单元包含在定时器中断函数中,其具有计数功能,设定了发送CAN刷新帧和数据上传的时序.
主控系统设置了独立看门狗来保证系统的稳定工作.独立看门狗与数据传输时序控制单元共用定时器.若5 min内系统接收到了上位机发来的心跳信号,则系统喂狗,防止复位;若未收到心跳信号,则系统将自动复位.
系统为每个总线网络上的节点分配了一个独立ID,即总线数据帧仲裁域标识符,该标示符采用标准帧格式.若系统有扩展需求,根据预定规则来设定扩展板卡的ID.对于新增的板卡,只需根据其ID对原先的软件设计稍作修改,进行并不复杂的功能扩充,就能够便捷的实现系统的功能扩展.
3.2 CAN通信设计
为了保证CAN通讯的稳定,系统采用计数器对CAN通信单元进行监控.CAN通信流程如图5所示.主控系统每隔100 ms向CAN总线发送刷新帧,更新继电器的控制状态,并由计数器计算被控系统的响应时间.若500 ms内主控系统接收到来自CAN总线的反馈信号,则系统CAN单元工作正常.否则,CAN通信单元将自动复位并重新初始化.
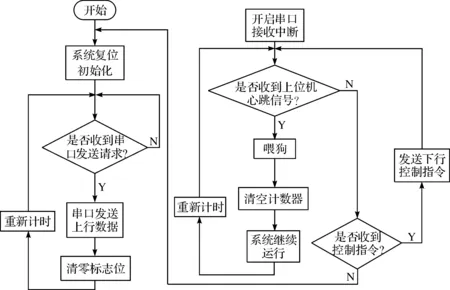
图4 主控系统软件流程
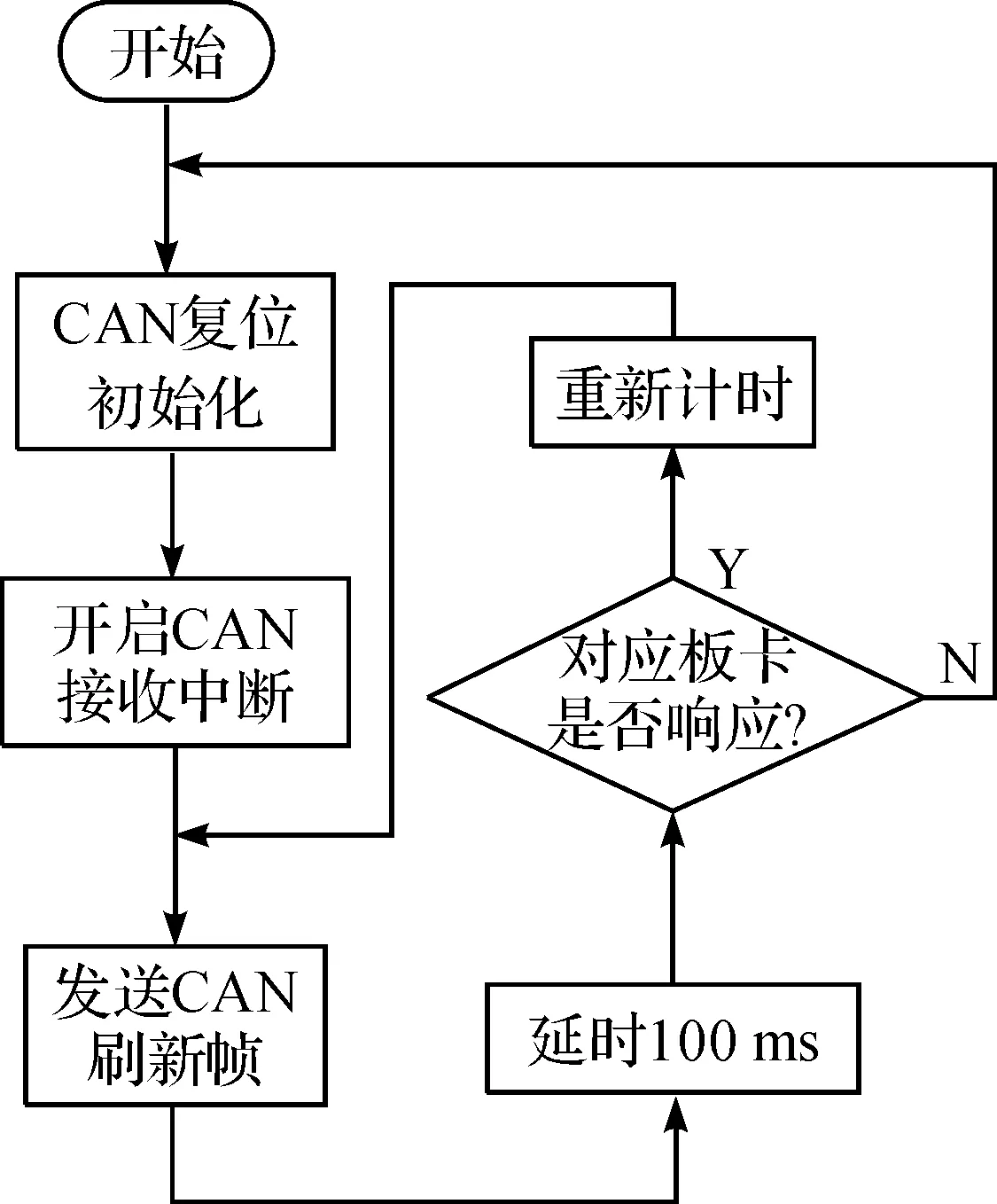
图5 CAN通信流程
4 系统测试
本文对系统的通信及安全,测控子功能,自检等方面分别进行测试.其中,通信安全测试包括自动复位与重启测试,测控子功能测试包括数据采集与控制功能测试,自检测试包括继电器控制端与输出端反馈测试,输入电能自检测试等.
4.1 通信及软件安全性测试
系统正常运行一段时间后,断开主通信连接,5 min后指示灯指示系统自动复位,表明系统安全机制有效.若程序出现故障,能够自动完成重启,以保证系统可靠与稳定.
4.2 控制与自检功能测试
以功率电阻作为系统负载并记录系统的供电电能参数.如图6所示,输入电能随着负载的变化而变化,以此实现电能实时自我监控.对继电器控制板卡继电器做开闭测试:继电器打开时,上位机接收到来自继电器板卡的反馈信号后将对应的继电器开关按钮高亮显示.打开带负载的继电器,监控界面能够显示其负载工作时的电流值.图7为实验室测试环境.
4.3 数据采集功能测试
用高精度数字源表模拟传感器分别输出电压信号和电流信号,电压值范围为0~5 V,间隔0.5 V;电流值范围为4~20 mA,间隔1 mA.用函数信号发生器模拟传感器输出的数字脉冲信号,设置输出信号为方波,频率范围20 Hz~2 kHz.测试结果显示,系统可准确获取模拟量和数字量输入值并通过上位机界面显示,系统采集功能正常.
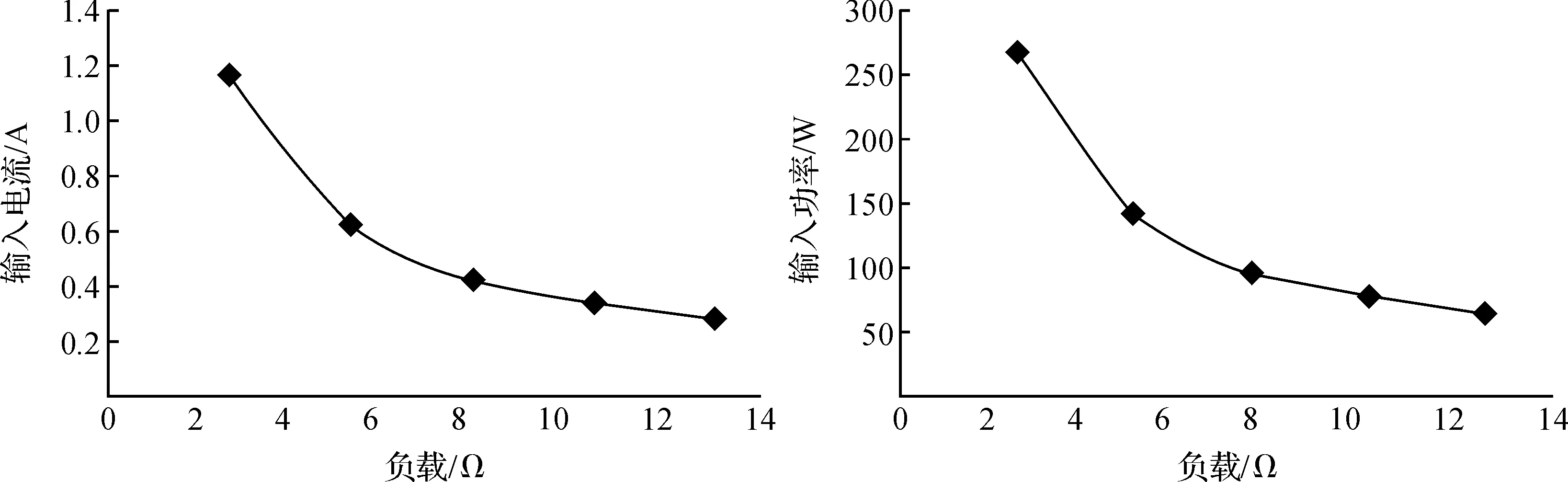
图6 输入电能曲线图
图7 实验室测试
4.4 扩展功能测试
为系统添加一块继电器控制板卡和一块采集板卡,指示灯显示CAN通信正常,通过上位机可以控制新增继电器板卡的继电器并能获取到来自采集板卡的数据.
5 结束语
本文设计的基于分布式管理的水下测控系统,突破了传统测控结构的局限性,实现了分布式的数据采集,外部控制以及统一的流程管理、数据通信、界面操控与显示等功能,为水下取样设备提供了功能多样化且高性能的测控平台.随着海洋科学考察不断深入,水下装备不断朝着大型化、复杂化与智能化方向发展,基于分布式管理的系统测控模式在海洋地质调查与资源勘探等领域具有更加广阔的应用前景.
[1]刘德顺,金永平,万步炎,等.深海矿产资源岩芯探测取样技术与装备发展历程与趋势[J].中国机械工程,2014(23):3255-3265.
[2]侯强.基于网络的分布式测控系统研究[D].西安:西北工业大学,2005.
[3]GAO X, HUANG D, CHEN Y, et al. The design of a distributed control system based on CAN bus[C]//2013 IEEE International Conference on Mechatronics and Automation. IEEE, 2013:1118-1122.
[4]PATRASCOIU N, BARBU I C. Monitoring and supervision solution for distributed control systems[C]//Carpathian Control Conference (ICCC), 2015 16th International. IEEE, 2015:366-369.
[5]赵蕊,余琨,郑文成,等.无人水下航行器分布式运动控制系统设计与仿真验证[J].中国舰船研究,2014,9(6):92-99.
[6]杨青书.基于CAN总线的AUV分布式控制系统设计与实现[D].中国海洋大学,2012.
[7]LI X, HUANG S, ZHAO Y, et al. Combination of distributed and centralized control architecture based on PCE protocol for large scale multi-domain elastic optical networks[C]//2014 13th International Conference on Optical Communications and Networks (ICOCN), 2014:1-3.
[8]吕实诚,宋晓波,王晶.基于网络的高精度数据采集卡设计[J].哈尔滨理工大学学报,2012,17(2):22-26.
Design of Underwater Application Oriented Measurement and Control System Based on Distributed Management
LIU Jingbiao, LI Ke
(SchoolofElectronicInformation,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
Referring to the current issue of the increasing demands for the stability during running process and function diversity of subsea sampling equipment, an underwater application oriented measurement and control system based on distributed management is designed in this paper. The system converts its entirety into distinct function modules by functional division. Each module which equipped with an isolated CAN transceiver joins in CAN bus in the way of board access so as to build the centralized-distributed structure that takes the main board as the management core. Owing to its excellent access capability and extendibility, the system extension will be much more convenient. In addition, the self-check ability is devised that can help the system monitor its own working performance of power supply and external control. Test results indicate that the system runs steadily and efficiently and all designed functions are implemented.
distributed management; measurement and control; board access; extendibility; self-check
10.13954/j.cnki.hdu.2017.01.001
2016-09-18
国家高技术研究发展计划(863计划)资助项目(2011AA090401)
刘敬彪(1964-),男,江西吉安人,教授,深海电子监控.
TP274+.2
A
1001-9146(2017)01-0001-05
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
中国船检(2020年11期)2020-11-27
物联网技术(2020年2期)2020-04-10
铁道通信信号(2020年8期)2020-02-06
电子制作(2019年13期)2020-01-14
电子制作(2017年23期)2017-02-02
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
火控雷达技术(2016年3期)2016-02-06
