
非均衡交通流五岔路口交通信号智能控制研究
2017-03-02 03:25董海龙汤旻安程海鹏
郑州大学学报(工学版) 2017年1期
董海龙,汤旻安,程海鹏
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
非均衡交通流五岔路口交通信号智能控制研究
董海龙,汤旻安,程海鹏
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
为了缓解交通拥堵,减少车辆在交叉口的等待时间,针对五岔路口非均衡交通流,采用基于人工鱼群算法的交通信号控制方法,实现了五岔路口多相位变相序的智能控制.该方法首先由红灯相位的车辆排队长度和红灯持续时间得到该红灯相位的通行紧急度,把通行紧急度最高的相位作为下一绿灯相位;其次,将当前绿灯相位车辆排队长度和筛选出的下一绿灯相位车辆排队长度与当前绿灯相位车辆排队长度的差值作为输入,利用模糊神经网络控制器实现绿灯延时.为了避免模糊神经网络陷入局部最小值,利用人工鱼群算法对模糊神经网络参数进行优化.在不同的车辆到达率情况下进行仿真研究,结果表明:该方法比传统的控制方法在自动调节信号周期方面效果更好,减少车辆平均延误7.2%左右.
五岔路口;交通信号;模糊神经网络;人工鱼群算法;车辆平均延误
0 引言
随着我国城镇化步伐的加快,近年来城市道路上的汽车数量大幅度增加,而土地资源有限导致城市道路的数量增幅不太明显,从而造成城市交通拥堵,给人们的生活带来了很大的困扰.城市中的交通拥堵主要发生在交叉口,而交叉口中五岔路口的交通流情况复杂,一个方向的车流对应五个方向的流向,合理地控制五岔路口能很好地改善交通拥堵情况.面对时变的、非线性的、滞后的交通系统,传统的定时控制已经很难得到满意的效果,智能交通控制成为该领域的研究热点[1-3].
模糊控制是目前智能控制最重要的形式,可以解决不基于精确数学模型的复杂非线性对象的控制难题[4-6].通过引入模糊逻辑语言变量及它们之间构成的模糊关系进行模糊推理,从而进入那些精确模型无法控制的禁区,以便获得基于精确模型控制所无法达到的精确的控制效果,但模糊控制缺乏在线自学习能力.神经网络对信息的处理具有自组织和自学习的特点,便于联想和推广[7].如果能把模糊控制和神经网络结合起来运用到五岔路口的智能控制中,将会对交通信号灯控制带来极大的帮助[8-11].
1 多相位变相序五岔路口控制算法
笔者的研究对象为五岔路口,如图1所示,五岔路口的车流来自A、B、C、D、E五个方向.为了避免交叉口上各方向交通流之间的交叉冲突,就要考虑合理的相位划分.针对五岔路口的复杂情况,经过调查研究,提出如下的相位划分.相位1:A交通流掉头、A到B、A到C、A到D、A到E;相位2:B交通流掉头、B到A、B到C、B到D、B到E;相位3:C交通流掉头、C到A、C到B、C到D、C到E;相位4:D交通流掉头、D到A、D到B、D到C、D到E;相位5:E交通流掉头、E到A、E到B、E到C、E到D.
在每个方向安装一个高像素摄像头,实时提取车流画面,通过处理画面,得到每个车道上的车辆排队长度.在交通信号控制过程中,每个相位的最小绿灯时间为15 s,以免车辆和行人来不及通过路口,造成交通事故;最大绿灯时间为50 s,如果某相位红灯时间太长,驾驶员心理上难以接受.
城市交通流的随机性非常强,尤其五岔路口受交通流分布的影响很大,对于传统的定时控制这必然会出现某一获得通行权的相位车流量很小甚至为零,而其它相位车流量很大并且长时间得不到通行.对于交通状况复杂的五岔路口而言,固定相序控制无法保证信号相序与实际交通流状况的一致性,会影响绿灯时间的利用率.因此,在现实交通中,需要更加灵活且相序可随机选择的控制策略.
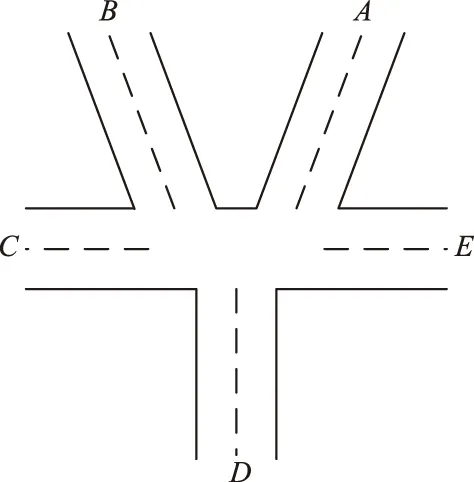
图1 五岔路口交通模型Fig.1 Traffic model of five-road intersection
变相序控制的基本思想:通过相位选择模块计算出当前各红灯相位的通行紧急度,并选择通行紧急度最高的相位为下一绿灯相位;通过绿灯延时模块确定当前绿灯相位的绿灯延长时间.变相序控制器的结构如图2所示.
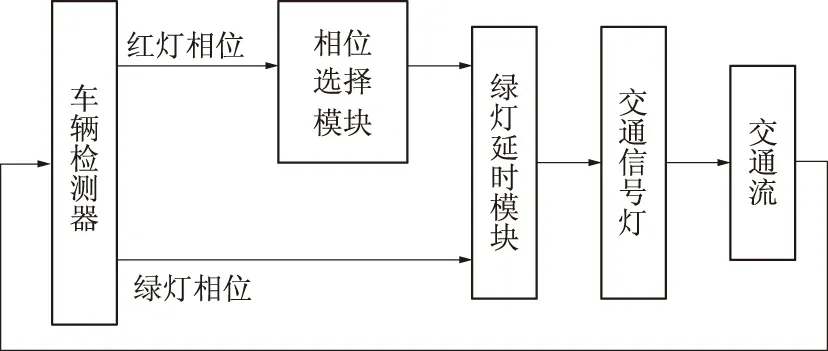
图2 变相序控制器的结构Fig.2 The structure of variable phase sequence controller
以减小车辆平均延误为目标,笔者给出如下控制算法.
Step1:从i相位开始,分别指定各相位的最短绿灯时间Gimin和最长绿灯时间Gimax.各相位的最短绿灯时间为15 s,最长绿灯时间为50 s.
Step2:给出i相位的初始绿灯时间Gi=Gimin.
Step3:绿灯时间结束时,根据4个红灯相位的车辆排队长度和红灯持续时间筛选出通行紧急度最高的相位,获取当前绿灯相位的车辆排队长度Li和通行紧急度最高相位的车辆排队长度Li+1.
Step4:若Li为0,则将绿灯转换到下一相位,转Step1;否则继续.
Step5:根据Li和ΔL=Li-Li+1的值来确定当前相位的绿灯延长时间ΔG.若ΔG<5,则将绿灯转换到下一相位,转Step1;否则累计绿灯时间Gi=Gi+ΔG.若Gi≥Gimax,则ΔG=Gimax-Gi,将绿灯转换到下一相位,转Step1;否则转Step3.
2 交通信号模糊控制
本文的变相序控制器包括2个子模糊控制器,分别是相序选择模块和绿灯延时模块.模糊控制器由3部分核心组成:模糊化模块、近似推理模块和清晰化模块[12].笔者采用MATLAB中模糊工具箱提供的图形用户界面,建立交通灯模糊控制系统.
2.1 模糊化
绿灯延时模块为双输入单输出,Li和ΔL代表输入变量,ΔG代表输出变量.Li为当前绿灯相位的车辆排队长度,其基本论域为[0 19],量化因子为1,模糊论域范围为{1,2,…,19},7个语言值为VS(很短)、S(短)、LS(较短)、M(中等)、LL(较长)、L(长)、VL(很长),隶属度函数如图3(a)所示.ΔL为下一绿灯相位的车辆排队长度与当前绿灯相位的车辆排队长度的差,其基本论域为[-18 18],量化因子为0.5,模糊论域为[-9 9],模糊论域范围为{-9,-8,…,9},7个语言值为NB(负大)、NM(负中)、NS(负小)、0(零)、PS(正小)、PM(正中)、PB(正大),隶属度函数如图3(b)所示.ΔG为当前绿灯相位的绿灯延时,其基本论域为[0 24],比例因子为1,模糊论域范围为{0,1,…,24},7个语言值为VF(很短)、F(短)、LF(较短)、M(中等)、LR(较长)、R(长)、VR(很长),隶属度函数如图3(c)所示.
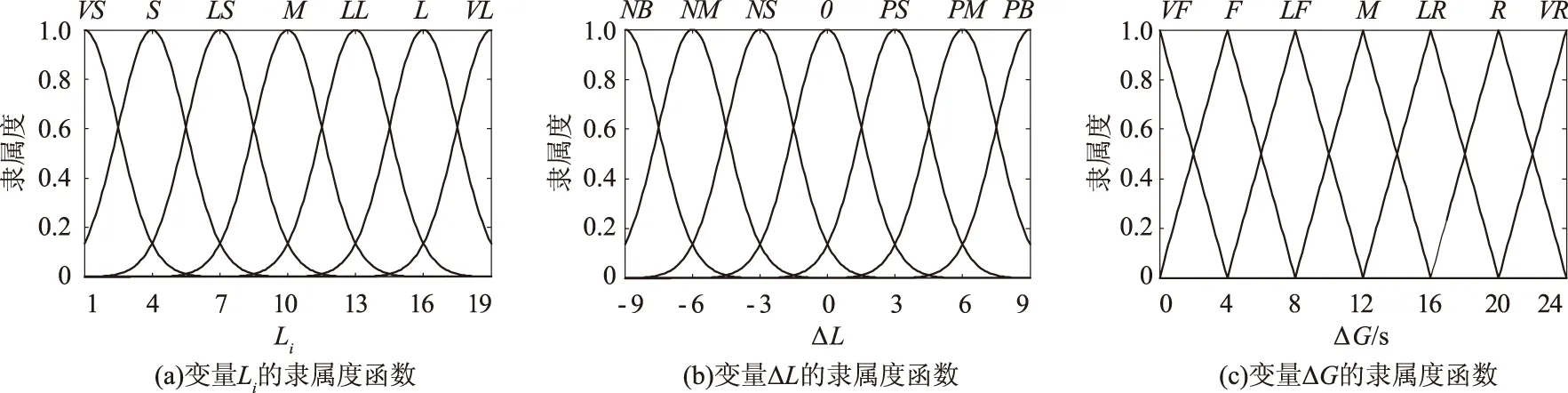
图3 隶属度函数Fig.3 Membership function
2.2 近似推理
模糊规则的建立是非常重要的,它将直接关系到整个控制器的性能好坏.根据交通调查情况以及交警和专家的实际操作经验和知识,归纳总结出能正确反映交通信号的控制规则表,如表1所示.
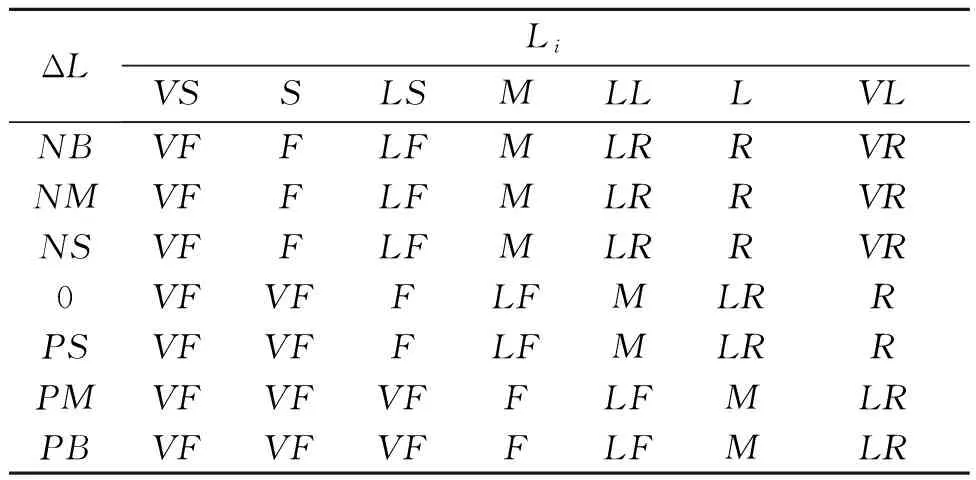
表1 模糊控制规则Tab. 1 Rules of fuzzy control
2.3 清晰化
常见的清晰化方法:重心法、最大隶属度法和面积平分法.笔者采用重心法,理论上该方法是几种清晰化方法中最直观合理的.在论域ΔG={μ1,μ2,…,μn}上,μj处的隶属度为A(μj),则ΔG的精确值由下式算出:
(1)
MATLAB的仿真结果如图4所示,从光滑的曲面图中可以看出,绿灯延时ΔG随Li值的增加而变大,同时随ΔL值的减小而变大.
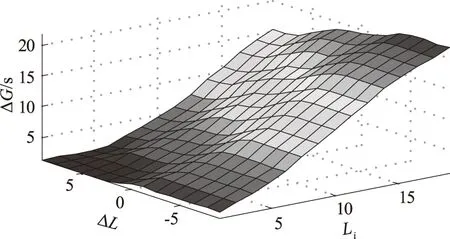
图4 输出量曲面观测窗Fig.4 Output surface viewer
3 基于人工鱼群算法的交通信号控制
3.1 模糊神经网络(FNN)
两输入单输出的交通信号模糊神经网络模型如图5所示,共有6层.
第1层是输入层,2个节点,对应L和ΔL两个输入变量.

第4层和第5层完成模糊推理.第4层有49个节点,表示49条模糊规则.第5层有7个节点,对应输出ΔG的7个语言值.
第6层是清晰化的过程,只有1个节点,最后的输出为绿灯延时ΔG.
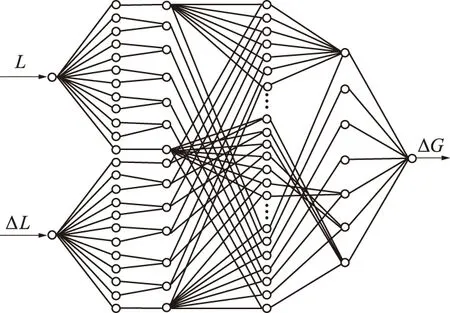
图5 模糊神经网络控制器结构Fig.5 Structure of fuzzy neural network controller
在MATLAB中完成了上述的模糊神经网络模型的搭建,由上述模糊控制得到模糊神经网络的训练样本集如表2所示,100组数据中选择80组数据作为网络训练数据,20组作为测试数据.网络的误差性能达到了期望值0.001.训练数据、验证数据、测试数据和总数据的输出与期望值吻合的很好,相关系数达到了0.9以上.
3.2 人工鱼群算法
人工鱼群算法(artificial fish swarm algorithm,AFSA)是受鱼群行为的启发,由李晓磊博士提出的一种基于动物行为的群体智能优化算法[13].
在一片水域中,鱼往往能自行或尾随其他鱼,找到食物源多的地方,因而鱼生存数目最多的地方一般就是本水域中食物源最多的地方.人工鱼群算法根据这一特点,通过构造人工鱼来模仿鱼群的觅食、聚群、追尾及随机行为,从而实现问题的寻优.
人工鱼群算法流程如下:
1) 确定种群规模fishnum,在变量可行域内随机生成fishnum个个体,迭代次数gen,设定人工鱼的可视域visual,半径为r,步长step,拥挤度因子δ,尝试次数try_number.
2) 计算初始鱼群各个体适应值,取最优人工鱼状态及其值赋给公告板.
3) 个体通过觅食、聚群和追尾行为更新自己,生成新鱼群.
4) 评价所有个体.若某个体优于公告板,则将公告板更新为该个体.
5) 当公告板上最优解达到满意误差界内,则算法结束,否则转3.
3.3 人工鱼群算法优化模糊神经网络
传统的模糊神经网络方法容易陷入局部最小值,而AFSA具有鲁棒性强、较快的寻优速度和较优的全局收敛能力,利用AFSA对模糊神经网络进行优化,建立一种新的控制模型.
模糊神经网络的训练学习过程主要是第3层与第4层之间的连接权值的修正.AFSA寻优的过程主要是其位置的改变,因此模糊神经网络的权值与人工鱼群的位置相对应.模糊规则层神经元的个数为49个,所以需要训练49个连接权值,49个权值对应一个49维的人工鱼.以车辆平均延误的倒数作为AFSA的食物浓度.在每次迭代
过程中,如果人工鱼当前所在位置的食物浓度优于公告板中的值,则将公告板进行更新,直到达到满意的目标函数值.具体取值如下:人工鱼种群规模100,最大迭代次数60,人工鱼的可视域0.6,移动步长0.1,拥挤度因子0.618,最多试探次数100.
4 仿真研究
笔者以西宁市胜利路、黄河路和五四大街所形成的五岔路口为例,根据当地的实际情况对此五岔路口进行仿真研究.编写C++语言仿真程序,利用该仿真程序对五岔路口在各种不同的非均衡交通流情况下进行仿真.假设各相位车辆随机产生,某一秒钟车辆的到达数量在0.0~0.3 辆/s之间.交叉口最大通行能力为0.3 辆/s,车流从红灯转变为绿灯后以0.5 辆/s的速率离开交叉口,每周期绿灯损失时间为17 s.表3给出了10个周期的车辆到达率,根据所给的车辆到达率进行仿真,得到表4所示的10个周期各相位的绿灯时间.
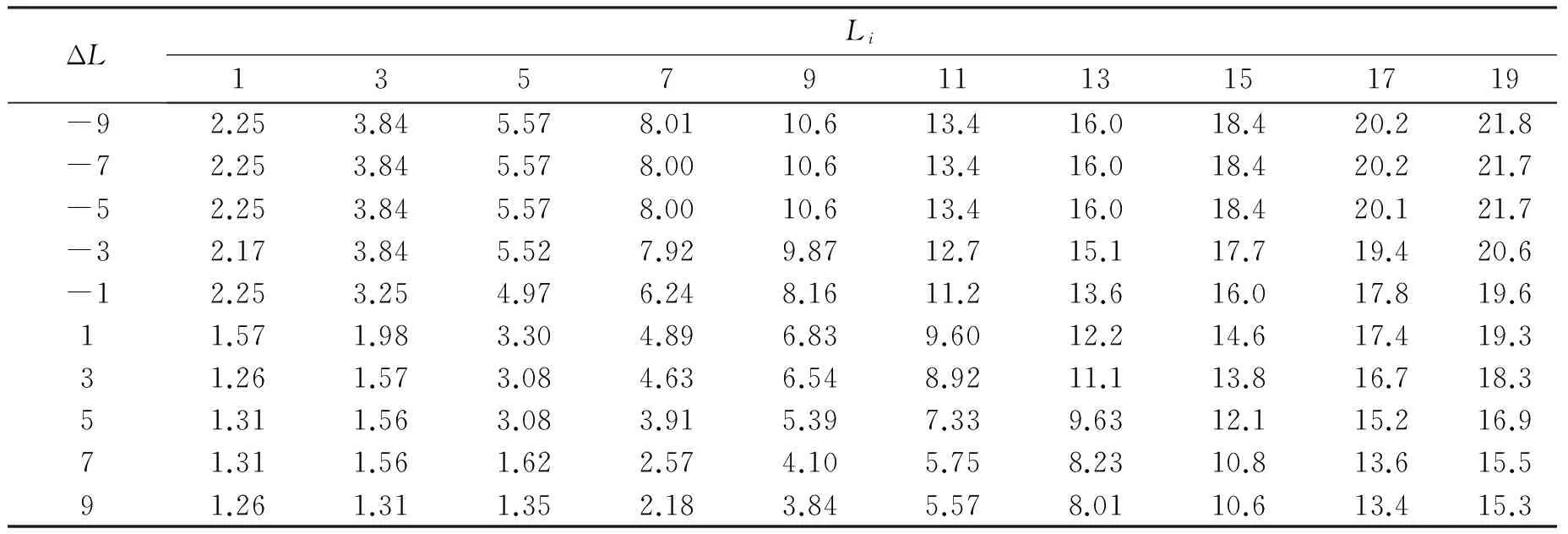
表2 训练样本集Tab. 2 Training data array
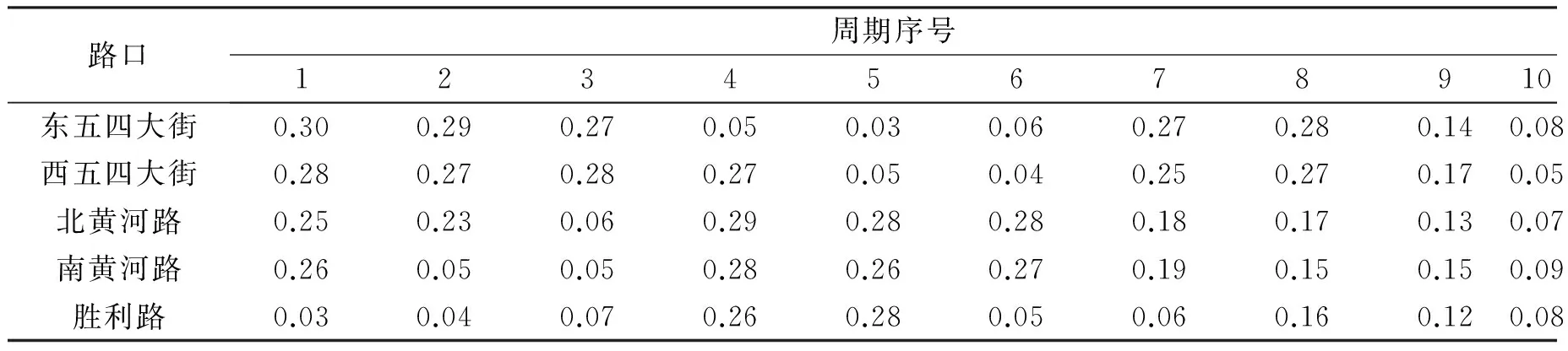
表3 车辆到达率Tab. 3 Vehicle arrival rates (辆/s)
五岔路口车辆延误计算公式如下.
某一相位中红灯方向的车辆总延误:
(2)
式中:n表示某一相位持续的时间;x表示停止方向数,当绿灯相位是五四大街时,x=13,当绿灯相位是黄河路或胜利路时,x=14;QiR表示当前相位开始时第i方向未走完的车辆数;qit1表示当前相位第i方向第t1秒内的车辆到达数.
某一相位中绿灯方向的车辆总延误:
(3)

第j相位车辆总延误:
Dj=DR+DG.
(4)
平均车辆延误:
(5)
式中:m表示总的相位数量;A表示某个周期的所有方向车辆到达数量的总和.
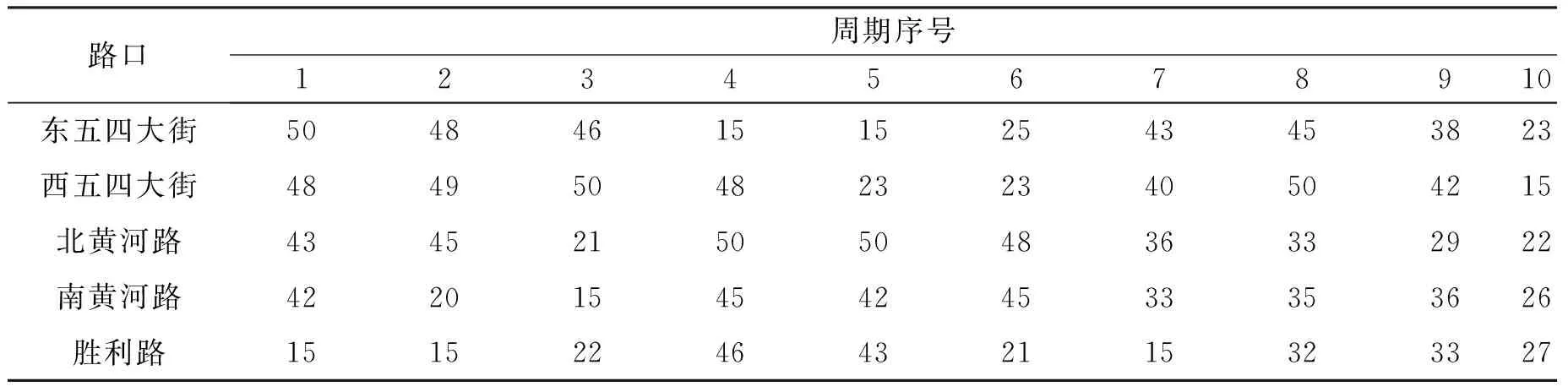
表4 AFSA优化FNN的仿真结果Tab. 4 The simulation results of AFSA optimized FNN s
笔者分别用定时控制、感应控制、模糊控制、模糊神经网络控制和AFSA优化的模糊神经网络控制5种方式对西宁市五岔路口进行了仿真,以每个周期的车辆平均延误时间作为控制指标,来判断5种控制各自的控制性能.经过多次仿真,得到的结果如表5所示.从中可以看出,感应控制比定时控制降低了车辆平均延误时间3.1%;模糊控制比定时控制降低了车辆平均延误时间3.7%;模糊神经网络控制比定时控制降低了车辆平均延误时间5.4%;AFSA优化的模糊神经网络控制比定时控制降低了车辆平均延误时间7.2%;AFSA优化的模糊神经网络控制比感应控制降低了车辆平均延误时间4.3%.

表5 车辆平均延误时间仿真结果Tab. 5 The simulation results of the average delay of vehicles s/辆
5 结论
1) 对于时变的和非线性的五岔路口非均衡交通流,传统的定时控制已经很难满足当前的需要,智能控制在控制效果上有很大的改善.
2) 将模糊控制与神经网络结合起来运用到五岔路口的智能控制中,克服了模糊控制缺乏自学习和自调整的缺陷.
3) 人工鱼群算法以较强的鲁棒性和较优的全局收敛能力优化模糊神经网络参数,避免模糊神经网络陷入局部最小值,使控制效果进一步提高.
4) 交通信号的智能控制动态地调整绿灯延长时间,对交通流进行实时控制,有效地降低了车辆平均延误,自适应能力强,提高了绿灯时间利用率,弥补了传统控制车道无车辆但信号灯为绿灯的缺陷.作者后续将考虑干线控制和区域控制,使设计的交叉口控制系统进一步协调,以满足复杂和特殊的中国交通情况.
[1] PAPPIS C P, MAMDANI E H. A fuzzy logic controller for a traffic junction[J]. IEEE transactions on systems man and cybernetics, 1977, 7(10): 707-717.
[2] 臧利林,贾磊,林忠琴.基于模糊逻辑的交通信号控制与仿真研究[J].公路交通科技,2006,23(4):124-127.
[3] MILANES V, PEREZ J, ONIEVA E, et al. Controller for urban intersections based on wireless communications and fuzzy logic[J]. IEEE transactions on intelligent transportation systems, 2010, 11(1): 243-248.
[4] 曹洁,苏玉萍,吴国龙,等.城市交通信号灯两级模糊控制及仿真研究[J].交通与计算机,2007,25(1):82-85.
[5] 李忠勤,范红刚,董金波.单交叉口交通信号的模糊控制[J].黑龙江科技学院学报,2011,21(4):306-311.
[6] 曹艳玲,梁法明,刘孟楠,等.基于模糊决策的大型客车电动助力转向系统研究[J].郑州大学学报(工学版),2015,36(3):64-67.
[7] 刘红红,杨兆升.基于神经网络的实时交通信号控制与仿真研究[J].交通运输系统工程与信息,2008,8(2):43-47.
[8] 申时凯,佘玉梅.模糊神经网络在信息安全风险评估中的应用[J].计算机仿真,2011,28(10):91-94.
[9] LIN C J, CHEN C H. Identification and prediction using recurrent compensatory neuro-fuzzy systems[J]. Fuzzy set and systems, 2005, 150(2): 307-330.
[10]许伦辉,习利安,衷路生.孤立交叉口多相位自适应模糊控制及其神经网络实现[J].中国公路学报,2005,18(3):90-93.
[11]段鹏飞,段兰兰,田琦.ANFIS在供热管网泄漏故障诊断中的应用[J].郑州大学学报(工学版),2014,35(4):56-60.
[12]赵国生,董艳艳.变电站电压无功模糊控制器的设计[J].郑州大学学报(工学版),2013,34(4):55-58.
[13]李晓磊,邵文江,钱积新.一种基于动物自治体的寻优模式:鱼群算法[J].系统工程理论与实践,2002(11):32-38.
Research on Intelligent Control of Traffic Signal for Five-road Intersection of Unbalanced Traffic Flow
DONG Hailong, TANG Minan, CHENG Haipeng
(School of Automation and Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070,China)
In order to alleviate traffic congestion and reduce the time of vehicles waiting, of unbalaned intersection, this paper adopted a traffic signal control method based on artificial fish swarm algorithm, which could achieve multi-phase and variable phase sequence intelligent control at five-road intersection. Firstly, the passable urgency of a red light phase was decided according to its vehicle queuing length and the red light duration; and the highest passable urgency phase should be the next green light phase. Secondly, the current vehicle queuing length of green light phase and the difference between vehicle queuing length of the next and current green light phase were taken as the inputs. The fuzzy neural network controller was used to control delays of the green light. In order to avoid fuzzy neural network falling into local minimum, artificial fish swarm algorithm had optimized the parameters of it. After simulation studies in the case of different rates of vehicle arrival, the results showed that this method was better than the traditional control in automatically adjusting the signal cycle, which reduced the average delay of vehicles for about 7.2%.
five-road intersection; traffic signal; fuzzy neural network; artificial fish swarm algorithm; average delay of vehicles
1671-6833(2017)01-0068-06
2016-11-10;
2016-12-20
甘肃省科技支撑计划资助项目(1304GKCA023);兰州市科技攻关计划资助项目(2013-4-18)
汤旻安(1973— ),男,陕西勉县人,兰州交通大学副教授,博士,主要从事智能交通系统、智能控制研究,E-mail: tma_1113@163.com.
U491.51
A
10.13705/j.issn.1671-6833.2017.01.005
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
作文小学高年级(2022年5期)2022-06-16
西部交通科技(2021年9期)2021-01-11
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年8期)2020-01-05
初中生写作(2019年3期)2019-09-10
计算机系统应用(2019年6期)2019-07-23
作文周刊·小学四年级版(2018年21期)2018-09-06
发明与创新(2016年34期)2016-08-22
