
基于联合卡尔曼滤波的道路养护施工机械定位精度研究
2017-02-21 19:36李晔胡权王波
科技创新与应用 2016年36期
关键词:数据融合
李晔+++胡权+++王波
摘 要:针对道路养护施工质量监测系统,为提高施工机械的定位精度,设计了一种基于GPS数据的联合卡尔曼滤波器。GPS数据包含位置和速度信息,运用标准卡尔曼滤扩波修正定位子系统,选用展卡尔曼滤波修正测速子系统,主系统给子系统的运算结果分配系数,并进行最优估计,从而利用速度信息校正位置,提高定位精度。实验结果表明,算法能够满足对施工机械准确定位的要求,有助于道路养护管理部门对施工过程进行质量控制。
关键词:道路养护;施工质量监测;GPS;联合卡尔曼滤波;数据融合
道路养护施工质量监测系统通过对道路施工作业参数进行采集处理,使决策部门能实时掌握道路施工状况和施工机械的运行状态,有利于对施工过程进行质量控制。为了便于管理部门实时掌控施工机械的位置,并计算有效施工距离,系统需要对施工机械进行准确定位。道路养护施工质量监测系统采用GPS技术实现施工机械定位。由于受到民用GPS定位精度不高的限制,監测系统对施工机械的定位存在较大误差,不能满足实时监测施工质量的需求。GPS的定位误差来自于接收设备和卫星信号的传播过程,主要包括卫星星历误差、卫星钟误差、接收机钟误差以及大气折射误差[1]。通过车载终端的GPS模块可以观测到施工机械的经纬度坐标、速度及方位角信息。根据NEMA-0183标准协议,经纬度数据和速度方位角数据分别通过GPRMC、GPVTG两种标准协议解析获得,且GPS获取经纬度和速度的方式不同[2]。因此,文章将GPS定位和GPS测速看作两个相互独立的子系统,采用滤波处理、数据融合等方法可使位置数据与速度数据相互校验,从而提高GPS定位精度,达到对道路养护施工机械进行实时监测的目的。
1 卡尔曼滤波算法选择
滤波理论是在对系统可观测信号进行测量的基础上,根据一定的滤波准则,采用某种统计量最优方法,对系统的状态进行估计的理论和方法。最优滤波要求信号或状态的最优估值应与相应的真实值的误差的方差最小[3]。卡尔曼滤波(Kalman Filter,KF)采用时域状态空间方法,把信号过程视为白噪声作用下的一个线性系统的输出,用状态方程来描述这种输入-输出关系,估计过程中利用系统状态方程、观测方程和白噪声激励的统计特性形成滤波算法。由于所用的信息都是时域内的量,卡尔曼滤波不但可以对平稳的一维随机过程进行估计,也可以对非平稳的、多维随机过程进行评估,适用于GPS数据的处理分析[4]。同时卡尔曼滤波是一种递推算法,便于在文章的车载终端上实现实时应用。对于非线性系统滤波问题,常用的处理方法是利用线性化技巧将其转化为一个近似的线性滤波问题,其中应用最广泛的方法是扩展卡尔曼滤波(Extended Kalman Filter,EKF)。对于非线性系统,首先围绕滤波值将非线性函数展开成泰勒级数,并略去二阶及以上项,得到一个近似的线性化模型,然后应用卡尔曼滤波完成对目标的滤波估计等处理[5]。
文章采用了联合卡尔曼滤波法,将车载终端的GPS系统划分为定位系统和测速系统两个相互独立的子系统。作为线性系统,定位子系统采用标准卡尔曼滤波器(KF),仅将经纬度观测值作为系统输入;而速度和方位角观测值则作为测速子系统的输入,因此测速子系统应建立适用于非线性系统的滤波器,文章选用扩展卡尔曼滤波器(EKF)。
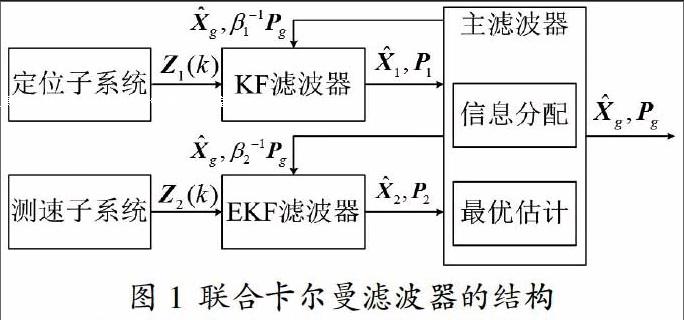
联合卡尔曼滤波器利用信息分配原理可以实现经纬度数据与速度数据的最优融合估计,并使整个系统具有一定的容错能力,对误差较大的子系统进行误差补偿,从而能够获得整体上最优的性能[6]。文章设计的联合滤波器的结构见图1。
2 系统状态方程的建立
在道路养护施工过程中,主要关注施工机械的经纬度位置及行驶速度等信息,无需获取其高度信息。因此,车载终端只解析与时间、经纬度、速度、方位角相关的GPS协议报文,并将经纬度坐标系转换为xOy投影坐标系,x方向、y方向分别为地理东向和北向,坐标单位为米,以便于建立施工机械位置坐标与速度的关系模型[7]。
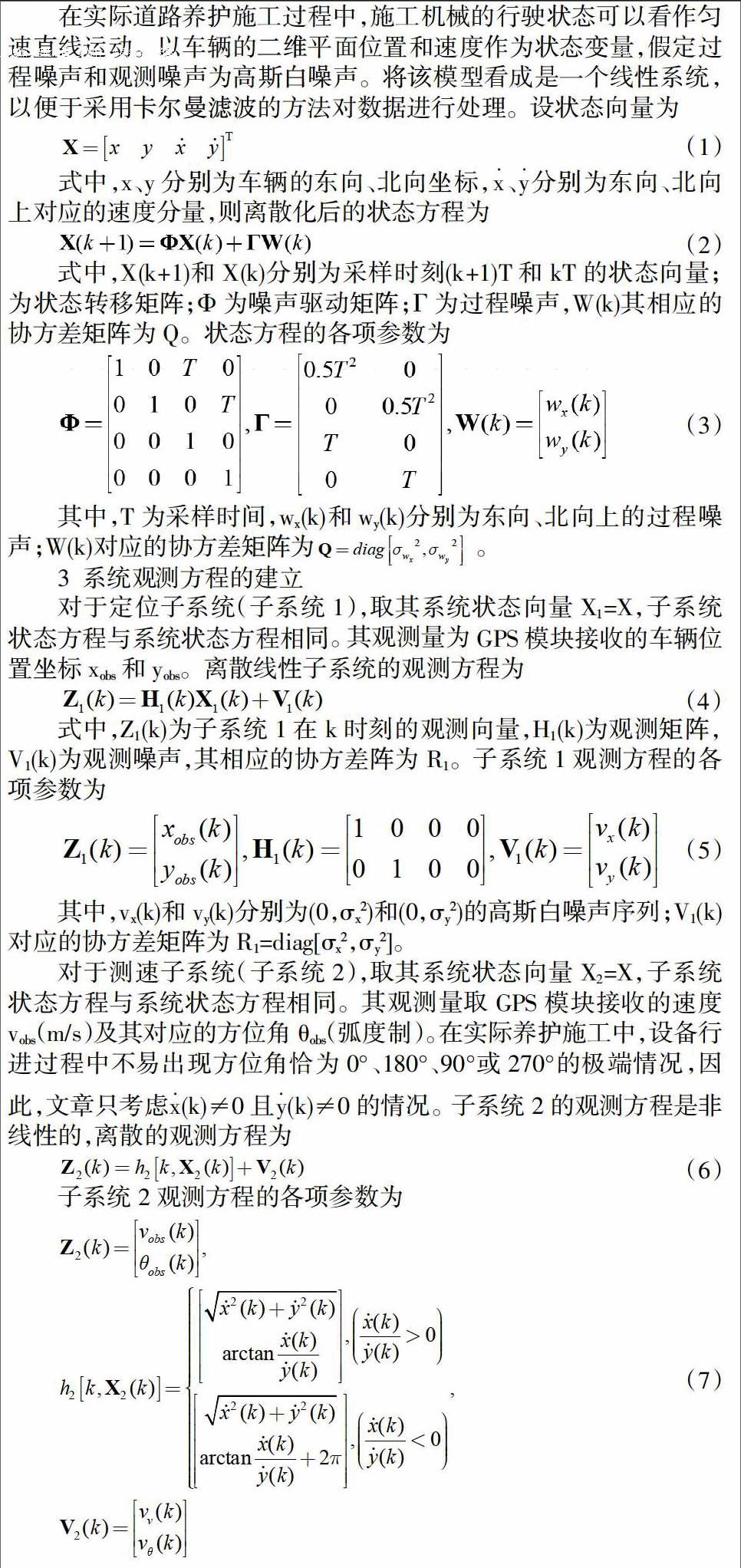
在实际道路养护施工过程中,施工机械的行驶状态可以看作匀速直线运动。以车辆的二维平面位置和速度作为状态变量,假定过程噪声和观测噪声为高斯白噪声。将该模型看成是一个线性系统,以便于采用卡尔曼滤波的方法对数据进行处理。设状态向量为
。
3 系统观测方程的建立
对于定位子系统(子系统1),取其系统状态向量X1=X,子系统状态方程与系统状态方程相同。其观测量为GPS模块接收的车辆位置坐标xobs和yobs。离散线性子系统的观测方程为
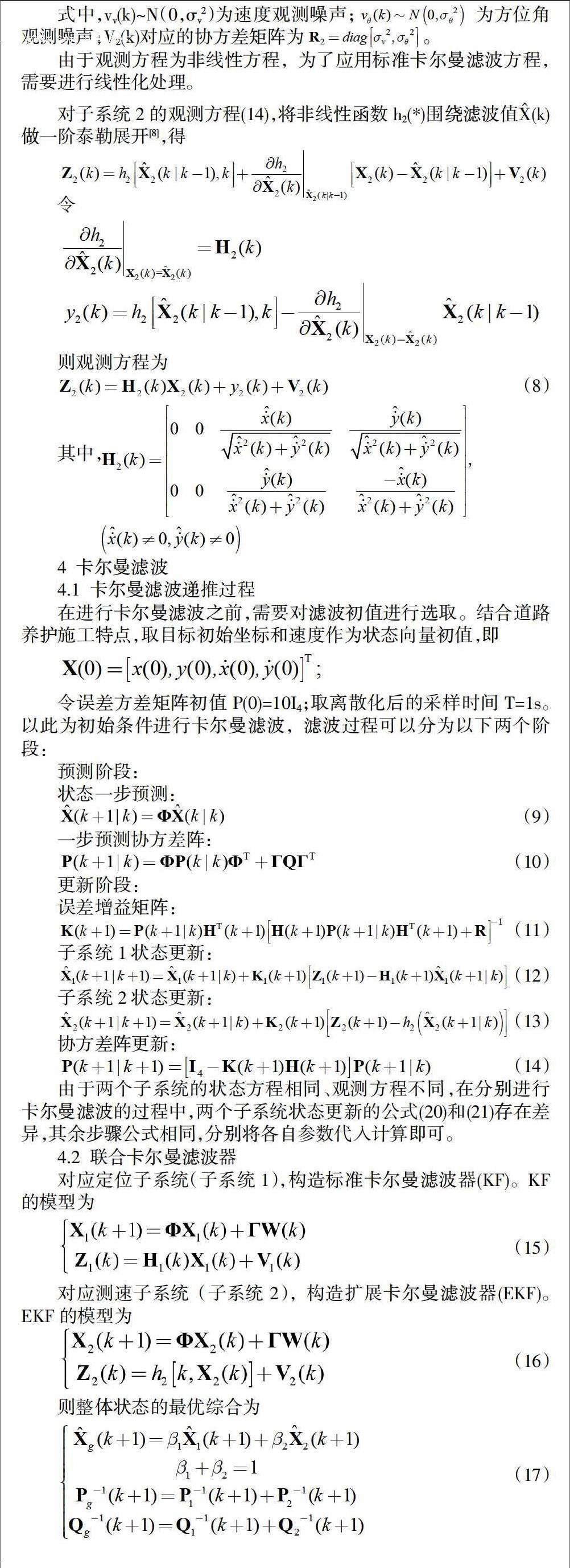
4 卡尔曼滤波
4.1 卡尔曼滤波递推过程
在进行卡尔曼滤波之前,需要对滤波初值进行选取。结合道路养护施工特点,取目标初始坐标和速度作为状态向量初值,即
令误差方差矩阵初值P(0)=10I4;取离散化后的采样时间T=1s。以此为初始条件进行卡尔曼滤波,滤波过程可以分为以下两个阶段:
预测阶段:
状态一步预测:
(9)
一步预测协方差阵:
(10)
更新阶段:
误差增益矩阵:
(11)
子系统1状态更新:
(12)
子系统2状态更新:
(13)
协方差阵更新:
(14)
由于两个子系统的状态方程相同、观测方程不同,在分别进行卡尔曼滤波的过程中,两个子系统状态更新的公式(20)和(21)存在差异,其余步骤公式相同,分别将各自参数代入计算即可。
4.2 联合卡尔曼滤波器
5 实验分析
5.1 数据采集与预处理
本次实验由家用轿车模拟压路机施工时的行驶状态,速度6 km/h左右,沿直线行驶,路程115 m。由车载终端在轿车行驶期间完成GPS数据的采集与存储,数据包括时间、经度、纬度、速度及方位角,采样周期为1s,而后由计算机通过串口读取车载终端存储的数据,并进行预处理。
预处理将采集的经纬度坐标转换为投影坐标,并以m为坐标单位;GPS报文中的速度单位为km/h,需要转换为m/s;方位角需要由角度制转换为弧度制,以便进行反三角函数运算。总之,作为系统输入的各项数据,单位必须与建立系统观测方程时的规定一致。
5.2 Matlab算法实现
图2中观测轨迹存在明显振荡,说明观测噪声的影响非常大。通過对分配系数进行试取发现,当 时,联合卡尔曼滤波器达到最优综合,滤波轨迹最为接近压路机的真实运动轨迹。联合卡尔曼滤波使压路机定位精度得到明显提高,有助于进一步增强施工质量监测效果。
6 结束语
文章针对道路养护施工质量监测系统,采用联合卡尔曼滤波克服车载GPS模块精度不足的缺点,从而提高施工机械定位精度。对于定位子系统采用标准卡尔曼滤波,对于测速非线性子系统则采用扩展卡尔曼滤波,主滤波器采用分配系数对两个子系统的输出结果进行最优估计。实验结果表明,算法能够满足对施工机械准确定位的要求,从而易于描绘出施工机械的运行轨迹,有助于道路养护管理部门对施工过程进行质量监测。
参考文献
[1]Choi E, Cicci D A. Analysis of GPS static positioningproblems[J]. Applied Mathematics and Computation,2003,140(1):37-51.
[2]韩友美,钟政,桑逢云,等.NEMA-0183协议下GPS数据的实时串口通讯程序设计[A].//2007年山东省数字国土学术交流会论文集[C].2007:198-201.
[3]Simon Haykin.自适应滤波器原理(第四版)[M].北京:电子工业出版社,2003:1-4.
[4]杜晓辉,任章.基于卡尔曼滤波的GPS静态定位精度分析[J].全球定位系统,2008,33(5):47-51.
[5]宗长富,潘钊,胡丹,等.基于扩展卡尔曼滤波的信息融合技术在车辆状态估计中的应用[J].机械工程学报,2009,45(10):272-277.
[6]丛玉良,陈万忠,孙永强,等.基于联合卡尔曼滤波器的交通信息融合算法研究[J].公路交通科技,2010,27(7):114-117.
[7]徐绍铨,张华海,杨志强,等.GPS测量原理及应用(第三版)[M]. 武汉:武汉大学出版社,2011:1-10.
[8]黄小平,王岩.卡尔曼滤波原理及应用:MATLAB仿真[M].北京:电子工业出版社,2015:77-79.
猜你喜欢
现代电子技术(2016年24期)2017-01-19
东方教育(2016年10期)2017-01-16
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年14期)2016-06-08
科技视界(2016年3期)2016-02-26
