异步电机效率优化控制及动态响应研究
2017-02-18 03:07付文轩
大电机技术 2017年1期
张 鹏,付文轩
(中国矿业大学 信息与电气工程学院,江苏 徐州 221008)
异步电机效率优化控制及动态响应研究
张 鹏,付文轩
(中国矿业大学 信息与电气工程学院,江苏 徐州 221008)
针对异步电机效率优化问题,在黄金分割法和模糊搜索控制法的基础上,提出了一种新型混合控制方法。该方法在模糊控制中设计了合理的比例因子和隶属度函数,保证了在初始阶段搜索步长,根据电机工况进行在线调整,减小了电磁转矩的波动。在优化的后半段中接入黄金分割法,有效解决了模糊控制在最优点附近振荡和收敛速度慢的问题,保证了系统的稳定性。同时针对弱磁情况,给出了一种动态电流分配策略以提高系统动态响应速度。仿真结果验证了新型混合搜索法和动态电流分配法的有效性。
异步电机;效率优化;黄金分割;模糊控制;混合控制
0 前言
当今社会,电机作为主要的动力设备已经被广泛应用于工业、农业、运输业等各个行业。当异步电机处于轻载工况时,电机的效率和功率因数下降很大,有很大一部分电量是被浪费掉的。而电机在大多数场合只是工作在轻载状态,所以研究异步电机的效率优化控制对我国经济发展、减少资源浪费具有重要意义[1]。
近些年来,针对电机效率优化控制策略,很多学者做了相关研究。其基本原理是调整电机的磁链大小,使其能耗达到最小[2]。目前使用较多的优化方案主要是损耗模型优化控制[3-4]和功率在线搜索寻优控制[5-6]。损耗模型控制对电机的参数依赖性较高,而电机参数在运行过程当中是不断变化的,要精确建立损耗模型是非常困难的,所以效率优化效果会受到影响;功率在线搜索寻优控制不受电机参数的影响,又可以做到全局优化,所以这种方法在实际应用中具有较高的使用价值。
限制搜索控制法应用的主要障碍是搜索收敛速度慢,因此选择合适的搜索步长以提高搜索收敛速度至关重要。对此学者们提出了许多选择搜索步长的算法,其中黄金分割法和模糊搜索法都具有良好的收敛速度。虽然使用这两种方法对异步电机的效率优化进行研究时都不受电机参数变化的影响,但是又都存在一定的问题。黄金分割法在搜索的开始阶段步长基本是一定的[7-8]。但是对于异步电机不同的运行状况,磁链的调整步长可能是需要变化的。由于受到确定步长的影响,在搜索过程中容易引起电机电磁转矩的波动,要想抑制这种波动必须在优化单元后接低通滤波器;另一个问题是当额定值离最优点很接近时,这种方法仍然会按照确定的步长进行搜索控制,容易使电机在深度弱磁区运行。而在模糊搜索法中[9-11],当功率过了最低点在最优点附近区域时,系统的输入功率变化不明显,可能会引起在最优点附近振荡,搜索时间较长,所以模糊搜索法的局限性在搜索的后半段[12-15]。并且在效率优化过程中,由于弱磁导致系统的动态响应较慢。
本文提出一种新型功率在线搜索寻优控制方法,将模糊控制法和黄金分割法相结合,对优化过程进行分段控制,不仅降低电机转矩波动,而且避免在效率最优点处出现振荡。同时为了提高效率优化时系统的动态响应速度,提出动态电流分配策略,使瞬时电磁转矩上升最快,系统具有快速转矩响应和速度跟踪性能。最后通过仿真验证了本文所提出方法的有效性。
1 新型效率优化控制系统
1.1 新型效率优化方法
使用黄金分割法进行异步电机的效率优化,可以使输入功率明显降低,有效提高系统的效率。但是在寻优的过程中,由于其寻优前半段步长较大,导致电磁转矩有较大波动,转速略有波动。模糊搜索控制法的效率优化效果同样明显,但是在寻优后半段中,由于收敛速度不确定,导致系统在最优点附近发生振荡,收敛时间较长,对系统的稳定性存在一定影响。
如果能既保证在搜索的起始阶段抑制转矩波动又保证在搜索后段在寻优点附近不发生振荡,那么效率优化控制将会上升到一个新的台阶。而模糊搜索控制法和黄金分割法如果能有机的结合在一起,那么具有很好的互补性,可以达到上述的控制要求。在电机优化控制系统中,模糊控制在初始阶段的搜索步长明显比黄金分割法的要小很多,而且步长会根据电机的运行工况进行自适应的调整,这说明模糊寻优在到达最优点之前的步长给定更加合理,所以模糊搜索控制应该在效率优化的前半段中使用。而黄金分割法在寻优的后半段有很明确的收敛速度,所以为了避免在寻优的后半程中出现转矩振荡,应该在后半段寻优过程中使用黄金分割法进行在线寻优。这两种方法相结合构成了新型效率优化混合搜索方法。
新型混合效率优化方法流程图如图1所示,搜索过程为:
(1)当电机的转速或者负载转矩发生变化时,系统进入动态调速环节,这时转子的磁链给定变为额定值,让系统快速达到稳定状态。
(2)当电机的转速偏差|△ωm|<θ1(θ1是转速偏差阀值,一般取15r/min)时,认为系统进入稳定运行状态,系统进入寻优阶段,开始模糊搜索寻优。
(3)在模糊搜索阶段,经过若干步寻优,直至系统的输入功率增加,△Pd>0,即输入功率变化由负变正,此时电机越过功率的最低点,模糊搜索结束。
(4)开始黄金分割法在线寻优,直至两次给定的磁链之差小于系统设定的最小值ε:|ψ1-ψ2|<0,ψ1和ψ2是最后两次寻优的磁链给定。令最优磁链是最后两次磁链给定ψ1和ψ2的平均值。黄金分割法效率寻优结束,系统整个效率优化过程结束。
(5)在系统效率优化过程中,如果转速给定调整,使得电机的转速偏差|△ωm|>θ1,则寻优过程立即结束,磁链给定回复至额定值,系统进入动态调速过程。当系统再次稳定之后,重新进行寻优控制。

图1 新型混合效率优化方法流程图
1.2 新型效率优化系统的设计
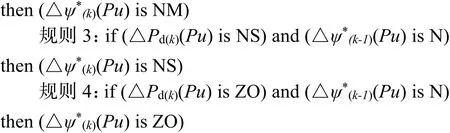
在模糊搜索的初始阶段,由于搜索步长的给定,使得磁链开始单方向下降,而输入功率也会随着磁链的下降而呈下降趋势,所以模糊搜索控制中主要是规则△ψ*(k-1)=N,△Pd(k)=NB、NM或NS起作用,当功率开始增加时模糊搜索结束,系统开始进入下一个搜索阶段,所以在新的效率优化控制器中模糊规则有四条,规则如下:

在初始阶段的模糊搜索法中,输入比例因子Pd主要影响系统对输入的敏感度,其值越大,敏感度越低,偏差量的控制作用越弱,相反的,其值越小,敏感度越高,对偏差量的控制作用越强。输出比例因子ψb主要影响控制性能的强弱,其值越小,系统的控制作用越弱,系统的动态响应时间会越长,影响系统收敛的快速性,相反地,其值越大,控制器对系统的控制作用就越强,系统响应快,但是容易产生超调,如果过大会使系统产生振荡,给系统稳定性带来极大不利。在选择这些参数时要经过大量仿真实验,直到达到系统的要求为止。
在黄金分割法开始搜索时,首先要确定搜索区间。当模糊控制经过若干步之后,功率降至最低点甚至越过效率最优点,令此点为ψ1,在ψ1前面一点为ψ0,在ψ0前面的一点ψ2,以ψ1和ψ2两点分别作为黄金分割法搜索区间的上下限,这样保证了效率最优点必在这两点之间。这个新搜索区间比原来的搜索区间要小很多,搜索步长也会相应减小很多,这样对电机电磁转矩的影响会大大降低。然后是确定搜索磁链的阀值ε,阀值的大小不仅影响搜索时间,还会影响到最优磁链的精度,本文采用阀值为0.05Wb。当两次给定的磁链差的绝对值大于设定的阀值时,则会继续进行寻优,当两次给的磁链差的绝对值小于设定阀值的时候,系统就会以最后两次的磁链和的平均值作为最优磁链输出,此时效率优化过程结束,退出寻优。
在系统进行效率寻优时会同时对电机的运行工况进行判断,如果实际转速与给定转速的差的绝对值超出设定的阀值时会退出寻优,系统进入动态调速。
2 效率优化动态响应
通过减小磁链实现轻载时的异步电机的效率优化,而电机的负载在突变时,由于较低的磁链将会限制电磁转矩的输出能力,对系统的动态性能造成不利影响,反应速度较慢。矢量控制是模拟直流电机的控制方式,使其磁通和转矩独立控制,可得到以下两式:


由于效率优化控制时,转子磁链较小,在负载转矩突变时,转矩电流受电动机额定电流和逆变器输出电流的限制,不可能无限增大,动态过程受限。在实际使用中,逆变器的最大输出电流大于电动机额定电流,在启动或者负载增加时允许短时间内通过较大电流,因此可以在动态过程中利用逆变器的最大输出电流,将其作为感应电机定子输入电流的上限。
将式(1)带入式(2)可得:

当式(3)取最大值时,电磁转矩上升速度最快。定子电流受逆变器最大输出电流i2max限制可表示为:

动态电流分配原理如下:

动态电流分配转化为最优值问题,利用拉格朗日乘子法求解,可得:

当负载转矩突然增大时,瞬态电磁转矩低于负载转矩,所以转速下降。按式(6)动态分配励磁电流和转矩电流分量,电磁转矩将快速上升,从而使动态转速降最小。
3 仿真分析
3.1 基于混合效率优化的仿真分析
混合效率优化方法的结构如图2。仿真步长设置为0.3s,仿真实验中异步电机的主要参数如下:定子电阻RS=0.5257Ω,定子漏感 Lsl=0.005H,转子漏感Lrl=0.005H,定转子间互感 Lm=0.095H,转子电阻Rr=0.3017Ω,极对数Pm=2,铁耗等效电阻Rm=49Ω,转动惯量J=0.23kg·m2,额定电压u=380V,额定功率Pε=22kW,额定转速 nε=1480r/min,额定转矩Tε=130N·m。
给定转速 n=1200r/min,启动负载转矩为T=15N·m,同样在电机进入稳态之后t=3s时接入效率优化控制,仿真结果如图3所示。
由图3可以看出,使用混合控制法后,经过7步寻优之后,电机的输入功率达到最小。磁链由原来的额定值0.9Wb下降到0.36Wb,输入功率由原来的3800W下降到3200W,功率下降了600W,效率由原来的65.1%提高到77.3%,励磁电流明显降低,为了维持转矩的恒定,转矩电流有所增加。
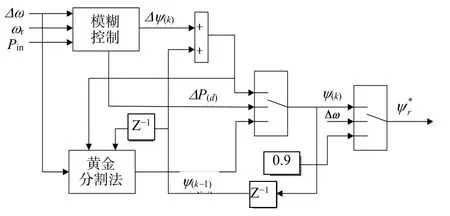
图2 混合效率优化法结构图
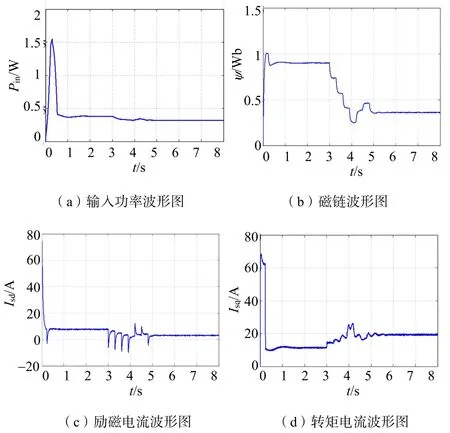
图3 混合效率优化仿真实验
3.2 效率优化动态响应的仿真分析
动态电流分配控制策略的仿真验证如图4所示。电机的转速给定 n=1000r/min,启动负载转矩T=15N·m。
图4中在t=5s时负载转矩由15N·m突变为25N·m,图4(a)由于转速的变化没有超过设定阀值,所以磁链还是处于弱磁状态,转矩经过0.2s达到稳定;图4(b)是采用动态电流分配控制策略,转矩经过0.08s达到稳定。所以动态电流分配策略可以有效提高转矩跟踪性能,使电磁转矩快速达到给定的负载转矩。
3.3 对比分析
对三种方法的效率优化效果进行对比分析:图5中,(a)、(b)分别是黄金分割法和混合搜索法在初始阶段的电磁转矩波形图,(a)中的前两个周期中转矩波动最大值达到30N·m,波动范围达到10N·m,而且经过0.1s才达到稳定;图5(b)中的前两个周期中转矩波动最大值23N·m,经过0.03s即达到稳定,可以看出在搜索开始阶段图5(b)中的转矩波动范围和稳定性明显好于图5(a)的。
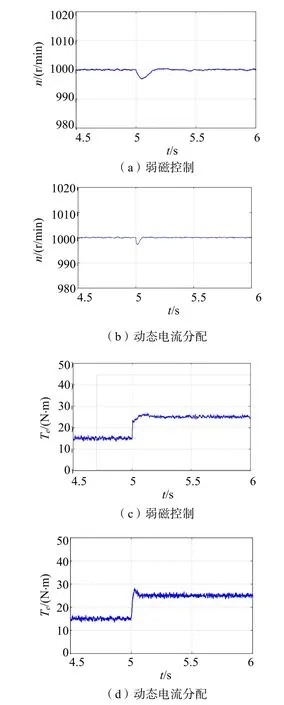
图4 转矩突变效率优化控制
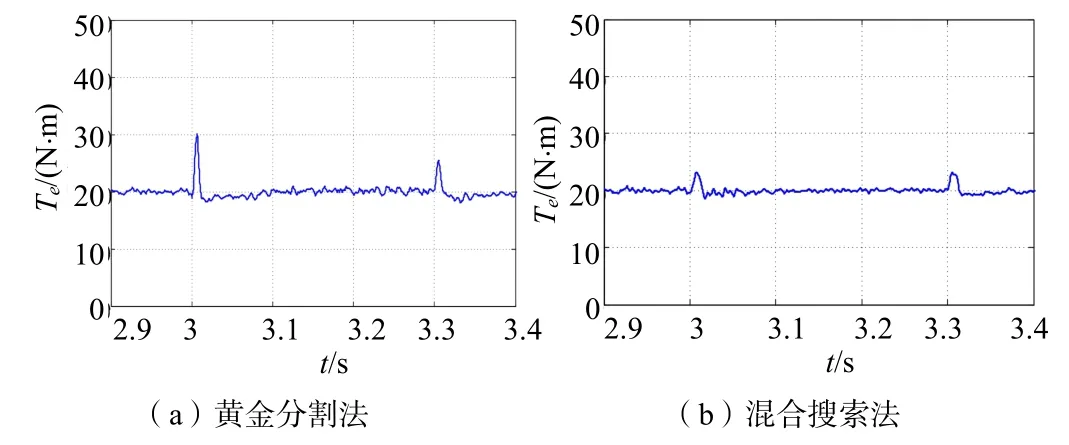
图5 转矩T=20N·m,转速n=1480r/min
图6(a)是模糊控制法磁链变化情况,需要经过9步搜索才可以稳定,图6(b)是混合效率优化控制法磁链变化情况,需要经过7步即可达到稳定。可以看出,使用混合效率优化控制法搜索时间明显比模糊控制法要短,提高收敛速度,而且后半段使用黄金分割法具有确定的收敛速度,解决了模糊搜索法在最优点附近的振荡的问题,提高系统稳定性。
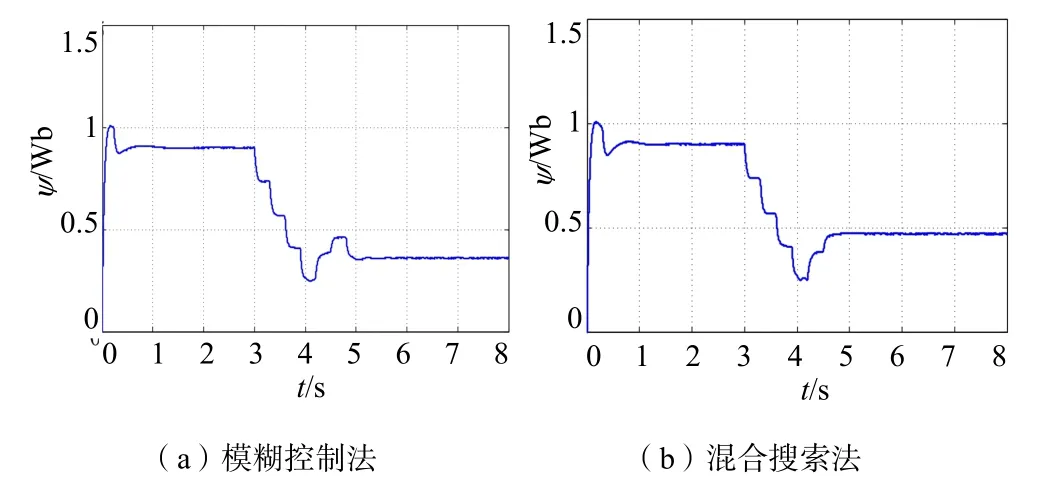
图6 T=20N·m,n=1480r/min搜索步数
通过上述分析可以看出,混合搜索方法将整个效率优化过程分为两部分,前一部分使用具有步长自适应的模糊搜索法,这样可以有效降低电磁转矩的不稳定性,在搜索后半段采用黄金分割法,消除在最优点振荡问题,缩短寻优时间,提高系统工作效率。两种方法优势互补,降低因为磁链的不稳定对系统造成的影响。仿真实验表明,混合控制结合了两种方法的优点,在搜索控制阶段的稳定性和快速性都有很大的提高。
4 结论
结合模糊搜索控制法和黄金分割法的优缺点,本文提出一种新型混合搜索方法,在效率优化初始阶段时使用模糊搜索控制,根据电机的运行工况调节搜索步长,降低电磁转矩波动,提高系统稳定性。当输入功率越过最低点时切入黄金分割法,提高收敛速度,解决了模糊搜索控制在最优点附近可能引起的振荡问题。同时引入动态电流分配策略,在动态过程中具有良好的转矩响应和速度跟踪性能,解决了异步电机效率优化控制动态响应速度慢的问题。仿真分析表明混合搜索方法的优化效果明显,提高了系统的效率,具有较高的实用价值。
[1]崔纳新,张承慧.变频调速异步电动机效率优化控制的研究进展[J].电工技术学报,2004,19(5): 36-42.
[2]常进,张曾科.感应电机恒功率因数控制的研究[J].中国电机工程学报,2002,22(11):70-74.
[3]Matsuse K,Taniguchi S,Yoshizumi T et al.A speed-sensorless vector control of induction motor operating at high efficiency taking core loss into account[J].IEEE Trans.On Ind,2001,37(3):548-57.
[4]Sheng M Y,Feng C L.Loss-Minimization control of vector-controlled induction motor drives[C]. Indonesia:IEEE 4th International Conference on Power Electronics and Drive Systems,2001.
[5]张立伟,温旭辉,郑琼林.异步电机用混合式模糊搜索效率优化控制研究[J].中国电机工程学报, 2007,27(27):83-87.
[6]Ta CM,HoriY.Convergence improvement of efficiency-optimization control of induction motor drives[J].IEEE Trans on Ind Applicat,2001,37(6): 1746-1753.
[7]刘小虎,谢顺依,郑力捷.一种改进的感应电机最大效率控制技术研究[J].中国电机工程学报, 2005,25(6):95-98.
[8]郭鹏义,杨耕,孙梅生,等.电动汽车驱动用感应电机在线效率最优控制的算法研究[J].电机与控制学报,2003,7(4):290-293.
[9]L.A.Zadeh.Outline of a new approach to the analysis of complex systems and decision processes [J].IEEE Trans.Syst,Man,cybern,vol.SMC,1973.
[10]Sousa G C D,Bose B K,Cleand J D.Fuzzy logic based on-line efficiency optimization control of an indirect vector-controlled induction motor drive[J]. IEEE Trans on Ind Electron,1995,42(2):192-198.
[11]Chuen Chien Lee.Fuzzy logic controller-part[J]. IEEE Trans.Syst.,Man,cybern.,1990.
[12]胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干问题[J].自动化学报,2006,24:567-584.
[13]刘涛,赵志忠.模糊PID控制在异步电机变频调速系统中的应用[J].全国电工理论与新技术,2009:27-30.
[14]李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨工业大学出版,2003.
[15]诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2007.
张鹏(1989-),中国矿业大学在读硕士研究生,主要研究方向为电力电子与电力传动。
审稿人:宫海龙
Study on Efficiency Optimization Control of Induction Motor and Dynamic Response
ZHANG Peng,FU Wenxuan
(School of Information and Electrical Engineering,China University of Mining and Technology, Xuzhou 221008,China)
In view of the efficiency optimization of induction motor,a newly hybrid control method is proposed on the basis of the golden section and fuzzy search control.This method sets the reasonable scale factor and membership functions in the fuzzy control to change the research step by the operating conditions,and then to suppress the electromagnetic torque ripple which caused by the large step in the golden section.Using golden section in the later part can suppress the shock near optimal point to decrease the convergence time,and then ensure the stability of the system.At the same time a dynamic current distribution method is put forward to improve the dynamic responses under the field weakening situation.The simulation results verify the effectiveness of the newly hybrid control and the dynamic current distribution strategy.
induction motor;efficiency optimization;golden section;fuzzy control;hybrid control
TM343
A
1000-3983(2016)0-0040-05
2015-10-08
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电测与仪表(2014年2期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01