基于三维激光扫描的建筑物变形监测方法
2017-02-16 02:24许广青代侦勇徐朝树
地理空间信息 2017年1期
许广青,代侦勇,吴 浩,徐朝树
(1.武汉大学 资源与环境科学学院,湖北 武汉 430079; 2.武汉理工大学 资源与环境工程学院,湖北 武汉 430070;3.宁波市镇海规划勘测设计研究院,浙江 宁波 315200)
基于三维激光扫描的建筑物变形监测方法
许广青1,代侦勇1,吴 浩2,徐朝树3
(1.武汉大学 资源与环境科学学院,湖北 武汉 430079; 2.武汉理工大学 资源与环境工程学院,湖北 武汉 430070;3.宁波市镇海规划勘测设计研究院,浙江 宁波 315200)
首先介绍了运用激光点云技术进行变形监测的步骤;再利用NURBS法构建三维模型进行整体变形分析,同时利用重心法提取特征点坐标进行局部变形分析,突破了传统以点代面的分析方式;然后通过误差分析,论证了该方法可行性;最后与传统监测方法进行了比较。
激光点云;三维激光扫描系统;NURBS 曲面拟合;变形监测;精度分析

建筑物受荷载、环境等因素影响会产生变形现象(水平位移、沉降、弯曲等),当变形超过一定限度,会影响建筑物自身的安全及人们的生命财产安全,因而定期对建筑物进行变形监测和分析是确保安全的重要环节。建筑物多表现为整体变形,传统的变形监测方法局限于对离散监测点的位移分析[1],无法对建筑物进行整体监测和分析。
三维激光扫描技术是测绘领域出现的新技术,也是近年来研究的热点问题[2],它采用激光测距原理,对待测对象进行面探测,快速记录待测对象表面的空间点位信息,获取含有真彩色信息和纹理信息的点云监测数据[3]。该技术在古建筑保护、三维建模、建筑工程变形监测、智慧城市等领域有着广泛应用,但是缺少相应的技术及理论体系[4]。本文以某汽车生产车间的受力钢结构为研究对象,总结了基于激光点云技术进行变形监测的理论,提出了整体和局部两个方面相结合进行变形分析的方法,最后通过与传统监测方法的比较突显了激光点云变形监测的应用前景。
1 变形监测方案
结合相关研究和工程实践,利用激光点云进行变形监测的技术流程一般包括外业数据采集、内业数据预处理、监测数据变形分析等,如图1所示。
2 数据采集及处理
2.1 数据采集
本次实验选用Reigl VZ-1000三维激光扫描仪,它采用全波形回波技术,每秒可发射300 000点的纤细激光束,角分辨率高达0.000 5°,扫描视域为水平360°、垂直100°,100 m距离处扫描精度为5 mm,扫描距离最长为1 200 m、短距达1.5 m。三维激光扫描系统通过探测器记录激光发射和接收的时间差获得被测点和扫描仪间的距离,编码器根据水平向和垂直向的步进角距值[4],实时获取该点三维坐标,形成点云数据,同时对外业踏勘设定的标靶点、固定监测点(图 2)进行精细扫描。2015年6月和7月对该汽车生产车间的受力钢结构(图3)进行扫描,两次扫描分别获取668 394个和703 652个点数据(图4)。
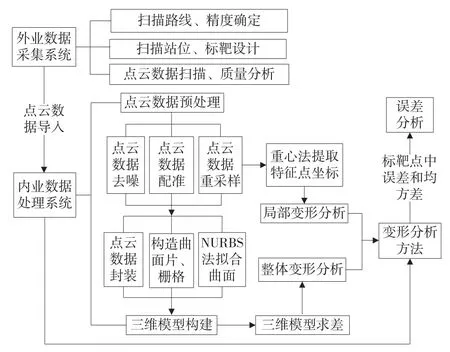
图1 激光点云变形监测方法流程图
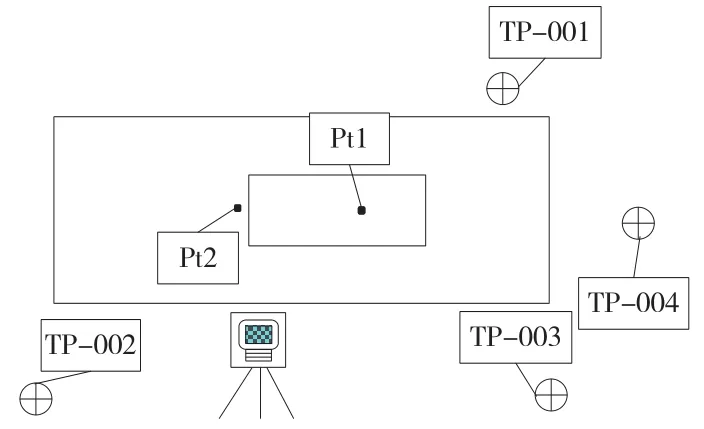
图2 标靶点、监测点布设
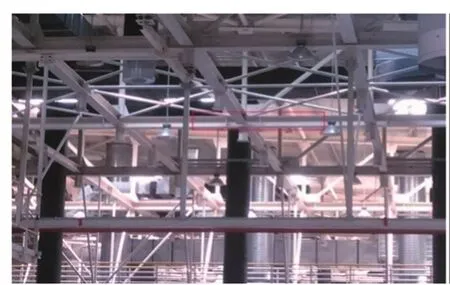
图3 支撑钢结构示意图
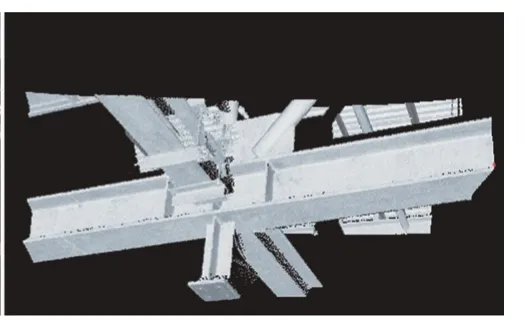
图4 支撑钢结构点云数据
2.2 点云数据预处理
三维激光扫描系统获取的点云数据散乱无序,不可直接应用于变形分析,要对其进行预处理,即利用Cyclone软件完成配准、去噪和重采样工作。点云数据配准是在数据采集时布设4处公共标靶点,通过计算转换参数将不同站点、不同视角下扫描的点云数据以最小误差拼接到统一的坐标系下,并利用最小二乘平差方法将点云数据转换到大地坐标系下。数据去噪是将数据中较明显的异常点和孤立点直接删除,对难区分噪点采用曲率滤波法,根据地形曲率变化取舍。重采样是基于点云多边形特点,选用等间距方法进行数据优化。
3 变形分析
变形分析是变形监测中最关键的环节之一[5],但三维激光扫描系统获取的是面探测数据,不能根据明确的变形监测点计算变形程度[6]。鉴于此,本文提出基于NURBS法拟合三维模型进行整体变形分析,同时利用重心法提取特征点坐标进行局部变形分析的方法,并通过精度分析论证该方法的可行性。
3.1 整体变形分析
3.1.1 NURBS法拟合模型
本文通过模型求差进行整体变形分析,而模型构建最重要的环节是点云数据的曲面重构,即根据点云数据获取几何拓扑信息,进而划分网格拟合出逼近被测对象的近似模型。根据生产车间支撑钢结构特征选用NURBS法拟合模型。
NURBS曲面的定义为[7-8]:

式中,0<u<1;Vij(i=0,1,2,…,m)为控制顶点;Wij为对应顶点的权因子;Ti,k(u)和Tj,l(u)分别为u向的k次和沿w向的l次B样条基函数,其中基函数递推公式为:
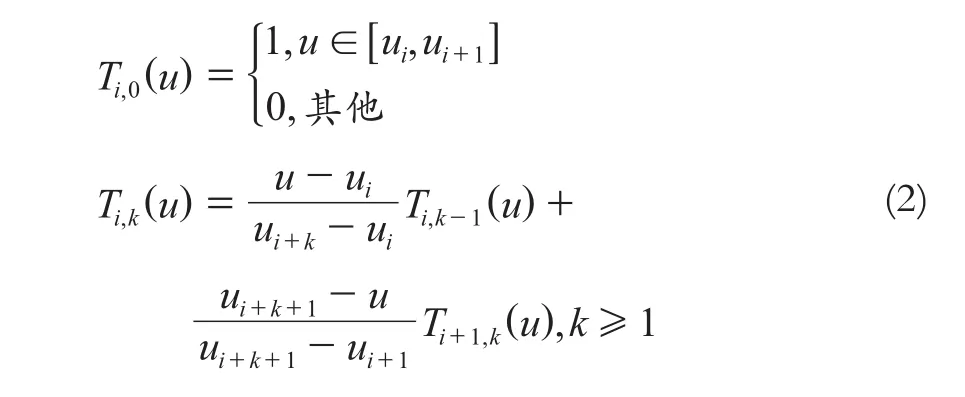
式中,k为幂次;ui(i=0,1,2,…,m)为节点,进而形成节点矢量。当节点数为m+1,幂次为k,控制顶点数为n+1时,节点矢量两端各有k+1个节点,且节点相同,以使曲线通过控制多边形的首末端点,并与首末两边相切,那么其u向和w向的节点矢量分别为:

该算法具有稳定性好、拟合速度快,对曲面规则性要求低的特点,由式(1)、(2)可知,NURBS曲面具备K次B样条基函数的性质,又加入了权因子,通过权因子和控制顶点的调控,可以更灵活地表示物体的自由曲面。
3.1.2 整体变形提取及分析
点云数据预处理后,采用NURBS法拟合模型,先将点云数据划分为网格,利用样条曲线进行拟合,组成特征曲线网格(图5);再将特征曲线拟合成NURBS曲面,拟合中引入权因子Wi>1,并调整相关几何参数,最终拟合结果见图6。
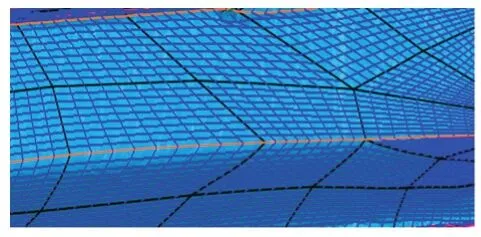
图5 建筑物局部点云特征曲线网格
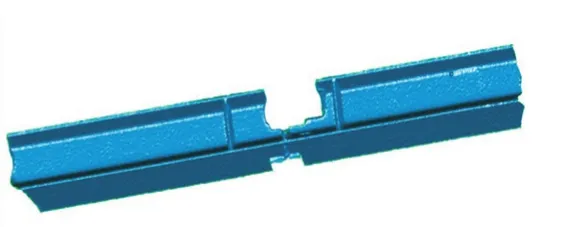
图6 NURBS法拟合模型结果
对两期模型进行数据配对和3D比较,获得模型差值,用不同颜色显示差值大小,进行整体变形分析。由图7可知,生产车间变形量集中在-0.020 8~+0.020 8 m,变形较大区域集中于钢结构交接处,整体变形处于稳定状态。基于点云技术进行整体变形监测,能得到建筑物整体变形信息,直观表达建筑物变形状态,同时对有变形的局部特征点做出判断,提高工作效率。

图7 整体变形监测结果图
3.2 局部变形分析
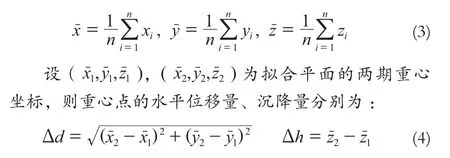
3.2.1 重心法拟合特征点
每个检测面由N个点组成,根据点云三维坐标,利用最小二乘法原理拟合回归平面,其方程为ax+by+运用微积分和矩阵的数学方法求得平面方程系数,进而求得回归平面重心坐标为:
3.2.2 局部变形提取及分析
利用重心法提取变形区域拟合点坐标值(图8);然后求得坐标差,提取变形量;再分析特征点水平位移和竖直位移变化,进行局部变形分析。Pt1、Pt2为固定观测点,Pt3、Pt4、Pt5为变形区域拟合中心点,其结果如表1所示。
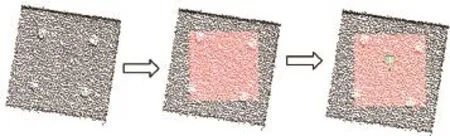
图8 重心法提取特征点坐标流程图
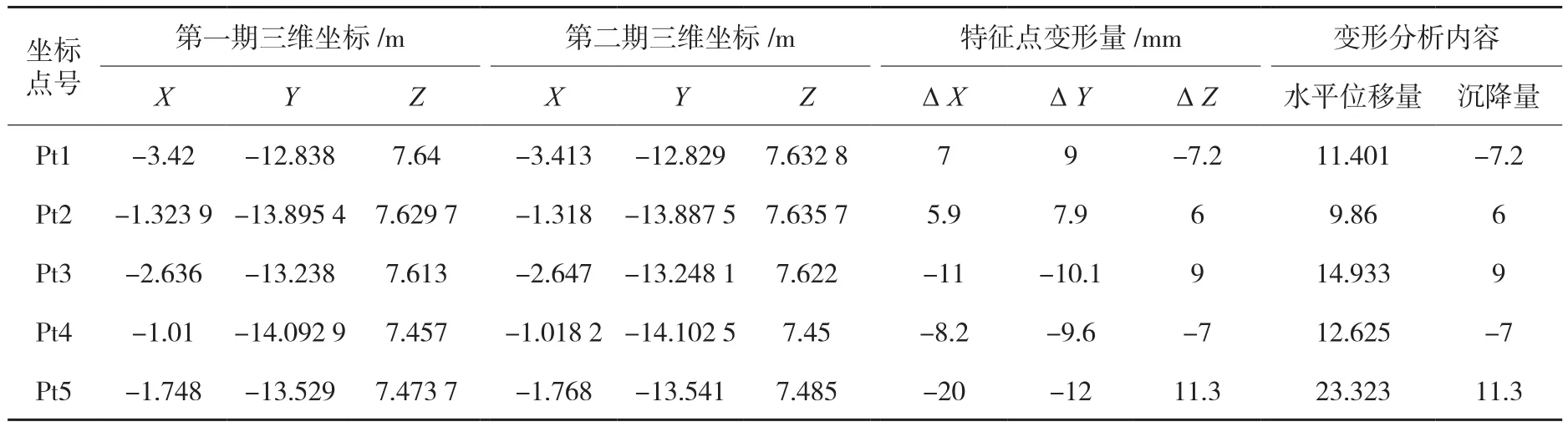
表1 特征点变形分析
由表1可知,特征点Z方向最大变化量为11.3 mm,X方向最大变化量为20 mm,Y方向最大变化量为-12 mm,水平位移量在9.86~23.323 mm之间,沉降量在-7.2~11.3 mm之间。
3.3 精度分析
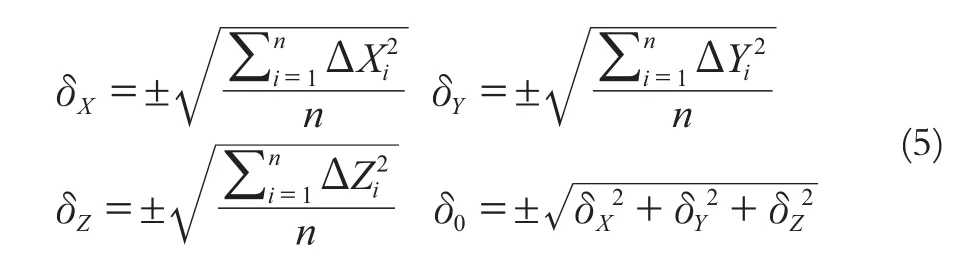
本文采用均方差和中误差两种方法对观测数据进行精度分析。均方差方法是在利用激光扫描获取标靶点三维坐标的同时,利用全站仪获得精度更高的标靶点坐标,通过坐标转换参数将两种测量方法获得的坐标进行统一,求取点云均方差。其公式为[9]:
两种测量方法获取的标靶点坐标差如表2所示。
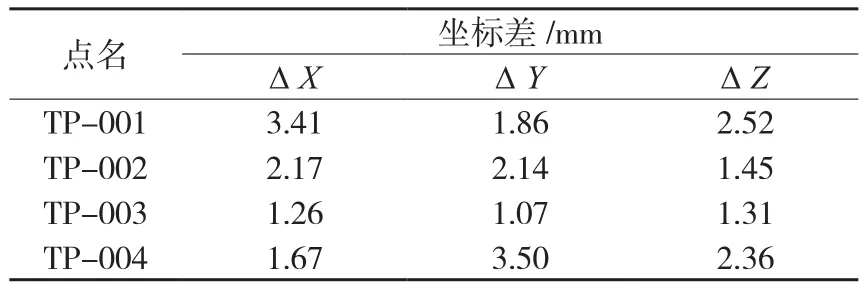
表2 标靶点坐标差值
由表2可知,测量坐标不符值最大为3.5 mm,标靶点均方差为±3.804 1 mm,X、Y、Z方向分别为δX=2.275 6,δY=2.314 8和δZ=1.983 5。
Reigl VZ-1000扫描仪在100 m内单点测量精度为±5 mm,特征点坐标由面内多个单点数据拟合得到,根据误差传播定律,特征点精度要远远小于±5 mm。由以上分析可知,激光点云的观测精度较高,可应用到变形监测领域。
4 与传统变形监测的对比
4.1 数据采集对比
传统的变形监测主要是利用全站仪、水准仪、GPS等基于单点测量方法获取少量变形数据;数据采集能力有限,外业工作量大,效率低。激光点云技术采集数据时具有不接触待测对象[10]、扫描速度快、点云数据信息量丰富且完整、效率高、可全天候作业的优势,更适合建筑物变形监测的不间断性和全面性要求。
4.2 分析模式对比
传统的变形监测多采用以点代面分析方法,数据处理模型和分析模式比较僵化,无法提取整体变形信息。基于激光点云技术的变形监测采用整体与局部相结合的全面分析模式,可快速建立变形物体的3D模型,进行整体变形分析。
由表3可知,激光点云监测方法更具优越性,一定程度上解决了传统变形监测方法监测难、分析不全面的问题。
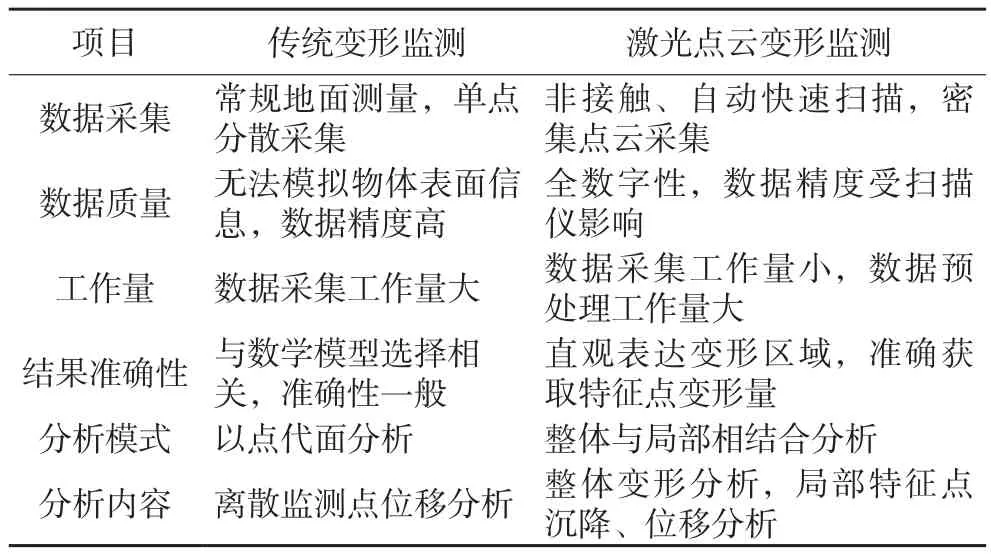
表3 传统变形监测和激光点云变形监测方法比较
5 结 语
鉴于传统测量模式的不足,本文采用激光点云技术进行变形监测,根据点云模型对单点和整体数据分别进行比较,结果表明运用激光点云技术对建筑物进行变形监测是可行的。该方法可以快速、全方位地获取建筑物空间三维数据,提取整体和局部变形信息,为改善建筑物地基强度参数提供了科学合理依据[11],在变形监测方面有广阔的应用前景。另外该方法也存在一些问题,如数据采集方面,受地形环境影响噪声过多、数据量大;数据建模方面,NURBS法局限于四边形区域等。
[1] 陶本藻.自由网平差与变形分析[M].北京:测绘出版社,1982
[2] 王建文,杜春梅.三维激光扫描系统的关键性技术研究[J].计算机工程与设计,2010,31(5):1 089-1 092
[3] 朱生涛.地面三维激光扫描技术在地形形变监测中的应用研究[D].西安:长安大学,2013
[4] 罗德安,朱光,陆立,等.基于三维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42
[5] 邱冬炜.穿越工程影响下既有地铁隧道变形监测与分析[D].北京:北京交通大学,2012
[6] 陈弘奕,胡晓斌,李崇瑞.地面三维激光扫描技术在变形监测中的应用[J].测绘通报,2014(12):74-77
[7] 朱心雄.自由曲线曲面造型技术[M].北京:科学出版社,2000: 152-154
[8] Riveiro B, Morer P, Arias P. Terrestrial Laser Scanning and Limit Analysis of Masonry Arch Bridges[J].Construction and Building Materials,2011,25(4):1 726-1 735
[9] 费业泰.误差理论与数据处理[M].北京:机械工业出版社,2005
[10] 张荣华,李俊峰,林昀.三维激光扫描技术在土方量算中的应用研究[J].测绘地理信息,2014,39(6):47-49
[11] 侯建国,王腾军.变形监测理论与应用[M].北京:测绘出版社,2008
P237
B
1672-4623(2017)01-0069-03
10.3969/j.issn.1672-4623.2017.01.021
许广青,硕士研究生,研究方向为地理空间数据处理和三维激光扫描技术应用。
2015-09-17。
项目来源:国家自然科学基金面上基金资助项目(41571344)。
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
流行色(2019年7期)2019-09-27
小学生学习指导(低年级)(2019年9期)2019-09-25
初中生世界·七年级(2019年8期)2019-08-29
测绘工程(2018年3期)2018-03-20
神州·下旬刊(2017年6期)2017-10-28
小天使·二年级语数英综合(2015年12期)2015-12-04
中国卫生(2015年7期)2015-11-08
测绘学报(2015年4期)2015-01-14
河南科技(2014年24期)2014-02-27