
下肢康复机器人的设计
2017-02-10 16:31周曲韦宇炜何汉武王俊华曾科学
中国高新技术企业 2016年35期
周曲+韦宇炜+何汉武+王俊华+曾科学
摘要:脑卒中和脊髓损伤是导致下肢运动功能障碍的两个主要的原因。脑卒中的致残率一直相对较高,随之带来的就是偏瘫等后遗症,而偏瘫就是其中最常见的一种。随着现代康复医疗器械的普及和推广,康复医疗师的工作量有明显下降。文章研究设计了一种成本低、在理论上有更好的训练效果的针对下肢步态康复机器人。
关键词:康复机器人;下肢训练;脑卒中;脊髓损伤;康复医疗器械 文献标识码:A
中图分类号:R496 文章编号:1009-2374(2016)35-0003-02 DOI:10.13535/j.cnki.11-4406/n.2016.35.002
脑卒中和脊髓损伤是导致下肢运动功能障碍的两个主要原因。脑卒中的致残率一直相对较高,随之带来的就是偏瘫等后遗症,而偏瘫就是其中最常见的一种。25年来,我国脑卒中患病率以每年8.7%的速度增加,现在面临着严峻的脑卒中患病发展形势。我国社会对于康复医疗的需求急剧增加,然而现有的医疗资源并不能满足大幅增长的康复患者需求,康复专业人才十分匮乏,人才缺口达10.09万人。一个康复医疗师需同时负责多个康复患者的训练,传统的康复训练对于他们来说是一个难以承受的负荷。随着现代康复医疗器械的普及和推广,康复医疗师的工作量有明显下降,但是市场上针对下肢步态的康复机器人主要都是由国外厂商生产,成本十分昂贵,而且某些功能实际训练效果并不是特别理想,所以本课题自主研发了一种成本低、在理论上有更好的训练效果的针对下肢步态康复机器人。
1 机器人总体设计方案
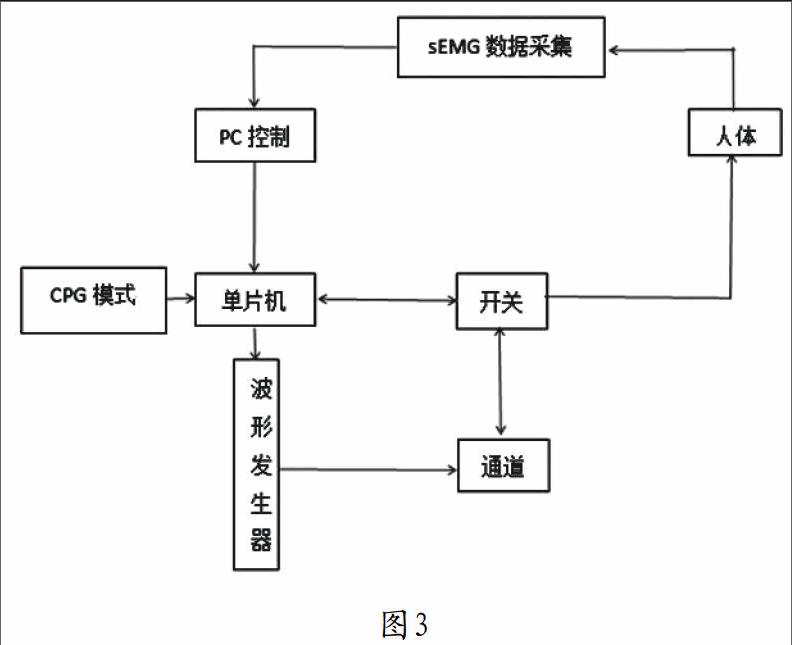
该机器人主要分为机械结构部分和电控制系统部分。机械结构部分是实现运动的主载体,患者必须依托机械结构来实现康复运动,而电控制系统部分是实现运动的动力。该机器人为站立式,电控制系统部分包括电机控制、减重系统、功能性电刺激系统、表面肌电采集系统及电子硬件部分。电机控制主要实现相关运动电机的转动,以带动机械结构执行相关的运动。减重系统帮助患者减少自身负重,以更好地、更轻松地完成康复训练,并减少机械结构和相关电子硬件的承重,延长机器人的寿命。在无功能性电刺激系统的训练下,患者完成的是纯被动训练,而功能性电刺激系统帮助患者完成半主动的训练,能够在情况严重的患者有所好转时对其进行功能性电刺激辅助训练,更好地调动其运动机能,有关实验表明,如电刺激的半主动训练比纯被动训练具有更好的康复效果。表面肌电采集系统能够采集到患者运动时的生理电信号,为其运动的生理特性分析提供信息。
2 机械结构部分
本课题的康复机器人主要作用于脚踝,通过脚踏板运动角度的改变带动患者的脚踝在x-o-y平面的旋转和平移,进而带动患者小腿和大腿运动,实现患者整个下肢的步态训练。
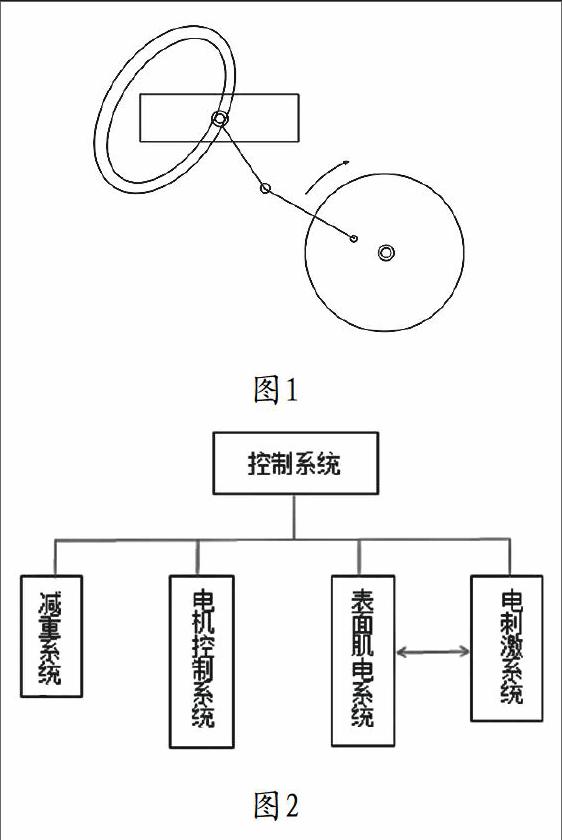
脚踏板的运动是通过曲柄—连杆机构加上圆盘转动来实现的。二连杆的一端铰接在圆盘的非圆心点上,二连杆的另一端连接在脚踏板侧面。通过圆盘的转动,依次带动二连杆、脚踏板运动来使脚踏板改变x-o-y平面上的位移,从而使固定在脚踏板上的患者的脚跟随着脚踏板做被动式康复训练。其中最主要的部分就是利用圆盘的转动,使固定在圆盘上的连杆做一个往复式的运动,进而能够达到模拟人步行的效果。脚踏板的一个侧面和连杆通过转动副连接,另外一个侧面通过一个滑动副固定在一个具有一定轨迹的滑槽内来固定脚踏板滑动时的轨迹,更好地拟合人步行的轨迹。
3 电控制系统部分
在电控制系统方面,本系统采用了伺服电机、压力传感器、光电角度传感器、光电限位开关等设备来完成智能化的功能。
在脚踏板的底部,封装有两个压力传感器,脚掌和脚跟各一个,来监控脚步压力的变化,根据压力变化的情况,系统能够有相对应的响应。
伺服电机放置在圆盘中心、脚踏板侧面。其中放置在圆盘中心的伺服电机带动圆盘转动,放置在脚踏板侧面的伺服电机带动脚踏板旋转,使踝关节的角度发生变化,配合连杆带动的平移运动,就完成了平面的平移——旋转运动。而两个伺服电机又是由一个智能的控制系统控制的,就是电控制系统的下位机部分,控制伺服电机在不同的步行时间点旋转相应的角度,完成整个步行周期时间序列的脚部位置要求。光电角度传感器用来监控伺服电机转动的角度,保障了该控制系统的精度。
由于大部分的偏瘫患者运动损伤程度较为严重,对于正常的站立都无法靠自己正常地完成,更不用说让其独立完成整个康复训练,因此设计了一个减重系统来帮助患者保持训练过程中的平衡,更容易地完成训练。该减重机构能够根据患者的身高,上下调动手支架的高度,满足不同患者的需求。主要的承重部分由一个拉力绳来承担,拉力绳通过一系列的滑轮组来实现将患者升高和降低。
功能性电刺激系统让该机器人摆脱了纯被动式的康复训练。功能性电刺激系统的作用原理主要是通过施加的电流的作用,神经细胞能够产生一个与自然激发引起的动作电位完全一样的神经冲动,使其支配的肌肉纤维产生收缩,从而获得运动的效果。这样通过对患者的下肢使用功能性电刺激,患者下肢的肌肉和神经运动单元进行刺激,产生自主性的运动,能够达到和正常人相同的步行效果。
髋关节的相关运动肌群有单关节髋部屈肌,单关节髋部伸肌;膝关节的相关运动肌群有腿筋、股二头肌、股直肌和股骨肌等;踝关节的相关运动肌群有单关节踝部趾屈肌群和踝部脚背伸肌群等。利用功能性电刺激系统刺激相应的肌肉或者肌群,就会产生相应的动作。
本电刺激系统采用中枢模式发生器(Central Pattern Generator)来实现刺激系统的控制。人类的行走基本模式由脊髓系统产生,并不需要大脑皮层的运动指令,节律性的运动可以随时开始或停止,一旦运动发起,不再需要意识的参与而自主地进行。这种触发方式更适合于步态的运动模式。
表面肌电(sEMG)系统采集人体的动作电位,和传统的肌电采集相比,表面肌电采集设备的贴片电极是放置在皮肤表面的,而传统的肌电采集设备是用有创的针电极来测量人体的肌电信号,所以表面肌电设备具有无创性、可大量重复性等优点。人体的各种动作都是由大脑的中枢神经系统发送一个指令给神经运动单元,神经运动单元的细胞内外电势差产生动作电位,进而刺激肌肉纤维和肌腱产生激发和收缩,从而完成一系列指令所对应的动作。通过表面肌电设备,我们能够检测到人体内这些动作电位。这些动作电位包含有丰富的动作——电位信息,对人体的步态分析、上肢的运动、手势识别等具有相当大的研究价值。sEMG方法越来越多地应用到了临床诊断当中,在康复运动领域是一种比较流行的运动能力评判标准。
4 结语
在本课题中的康复机器人中,sEMG采集系统采集到患者康复运动过程中的sEMG信号,将其作为输入参数传递给功能性电刺激系统,功能性电刺激系统将会根据sEMG信号里面包含的运动信息,调整功能性电刺激中电流大小及电流脉冲宽度等参数,更好地适应不同患者的不同程度的运动损伤,为患者提供一个个性化的治疗方案。
参考文献
[1] 胡进,侯增广,陈翼熊,张峰,王卫群.下肢康复机器人及其交互控制方法[J].自动化学报,2014,40(11).
[2] 黄东锋.重症患者早期康复医疗的现状与进展[J].中国康复医学杂志,2002,17(2).
[3] 谢欲晓,白伟,张羽.下肢康复训练机器人的研究现状与趋势[J].中国医疗器械信息,2010,16(2).
[4] 徐敏.功能性电刺激治疗系统的研制[D].北京交通大学,2009.
[5] 蔚二文,陈维毅.表面肌电图在肌肉功能评价中的应用[J].大众科技,2007,(1).
[6] 王颖.基于中暑模式发生器的下肢功能性电刺激康复系统设计与应用[D].上海交通大学,2012.
[7] 刘程.下肢表面肌电信号采集与处理系统设计与实现[D].武汉理工大学,2012.
[8] Delcomyn F.Nueral basis of rhythmic behavior in animals[J].Science,1980,210.
[9] Grillner S.Neurobiological bases of rhythmic motor acts in vertebrates[J].Science,1985,228.
[10] 李成龙.表面肌电信号在下肢康复训练中的应用研究[D].武汉理工大学,2013.
[11] Bogey R,Perry J,Gitter A.An EMG-to-force processing approach for determining ankle muscle forces during normal human gait[J].IEEE Trans Nueral Syst Rehab Eng,2005.
[12] Carlo J.De Luca. The use of surface electromyography in biomechanics[J].Journal of Applied Biomechanics,1994,13(2).
基金项目:广东省科技计划项目,项目编号:2013B010102010;国家青年基金项目,项目编号:61300106。
(责任编辑:黄银芳)
猜你喜欢
中国实用医药(2016年27期)2016-11-30
中国实用医药(2016年26期)2016-11-07
中国实用医药(2016年24期)2016-10-17
中国实用医药(2016年24期)2016-10-17
中国实用医药(2016年24期)2016-10-17
中国实用医药(2016年24期)2016-10-17
中国实用医药(2016年14期)2016-05-20
中国实用医药(2016年8期)2016-03-30
中国实用医药(2016年5期)2016-02-20
