
非完整约束移动机器人综合实验平台研发与应用
2017-02-10 08:54孙玉玺蒙艳玫唐治宏
实验技术与管理 2017年1期
韦 锦, 孙玉玺, 蒙艳玫, 董 振, 唐治宏
(广西大学 机械工程学院, 广西 南宁 530004)
非完整约束移动机器人综合实验平台研发与应用
韦 锦, 孙玉玺, 蒙艳玫, 董 振, 唐治宏
(广西大学 机械工程学院, 广西 南宁 530004)
采用硬件模块化、软件组件化的开发方式,通过开放性的输入输出接口,用可反复重构的模块化硬件、组件式软件构成积木式完全开放的柔性综合教学平台,具有极高的灵活性和可扩充性。该实验平台为学生提供多门课程的基础性、综合性、设计性实验的学习,将课程学习及实验和实际工业应用联系起来,并进一步提升到工业机器人硬件设计、安装调试和软件开发等创新设计、研究性学习,提高了学生学习的兴趣和积极性,培养了学生实际应用和综合创新能力,满足现代工业企业对综合技能人才的需求。
移动机器人; 综合实验平台; 模块化设计
非完整约束移动机器人是操作手和移动平台的组合体, 具有操作和移动的功能[1-2]。与固定基座的机械手相比, 这种机器人具有更大、更灵活的工作空间, 特别适合遥控和远程操作, 主要应用在矿业、建筑、林业、空间探索和军事等方面。对于移动机器人, 移动平台使系统具有非完整约束性,移动平台和机械手之间具有很强的耦合作用, 使移动机器人的轨迹规划和运动控制变得复杂,两者的结合进一步增加了系统的复杂性[3-8]。移动机器人是一个集合环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合型智能系统[9],涉及机械设计技术、机器人技术、控制工程、测试技术、智能信息处理技术、嵌入式系统设计以及运动控制系统等多学科知识的学习和综合应用,是机械类学生开展机器人相关课程学习和创新性实践的良好平台。
本着融合多门课程知识的学习和综合运用,同时以展示产品研发过程为目标,结合课题组近年成功研发的机械手产品,设计开发了一套非完整约束移动机器人开放性综合实验平台,学生在实验平台上可以完成机械设计、机器人技术、控制工程、测试技术、智能信息处理技术、嵌入式系统设计以及运动控制系统等课程的一系列专题和综合实验,满足自动控制和机电一体化实验教学的需要。同时把一个产品的研发过程浓缩到实验里,让学生结合实际产品的研发过程,带着思考去亲手实践一个产品从无到有的过程,强化学生对所学知识的理解和掌握。通过设计一系列展示研发过程的实验课题,提高学生专业知识综合运用的能力,激发学生学习和研究兴趣。
1 综合实验平台的总体设计
非完整约束移动机器人综合实验平台包括六关节机械手、移动底盘以及控制系统3大部分。综合实验平台总体架构见图1。
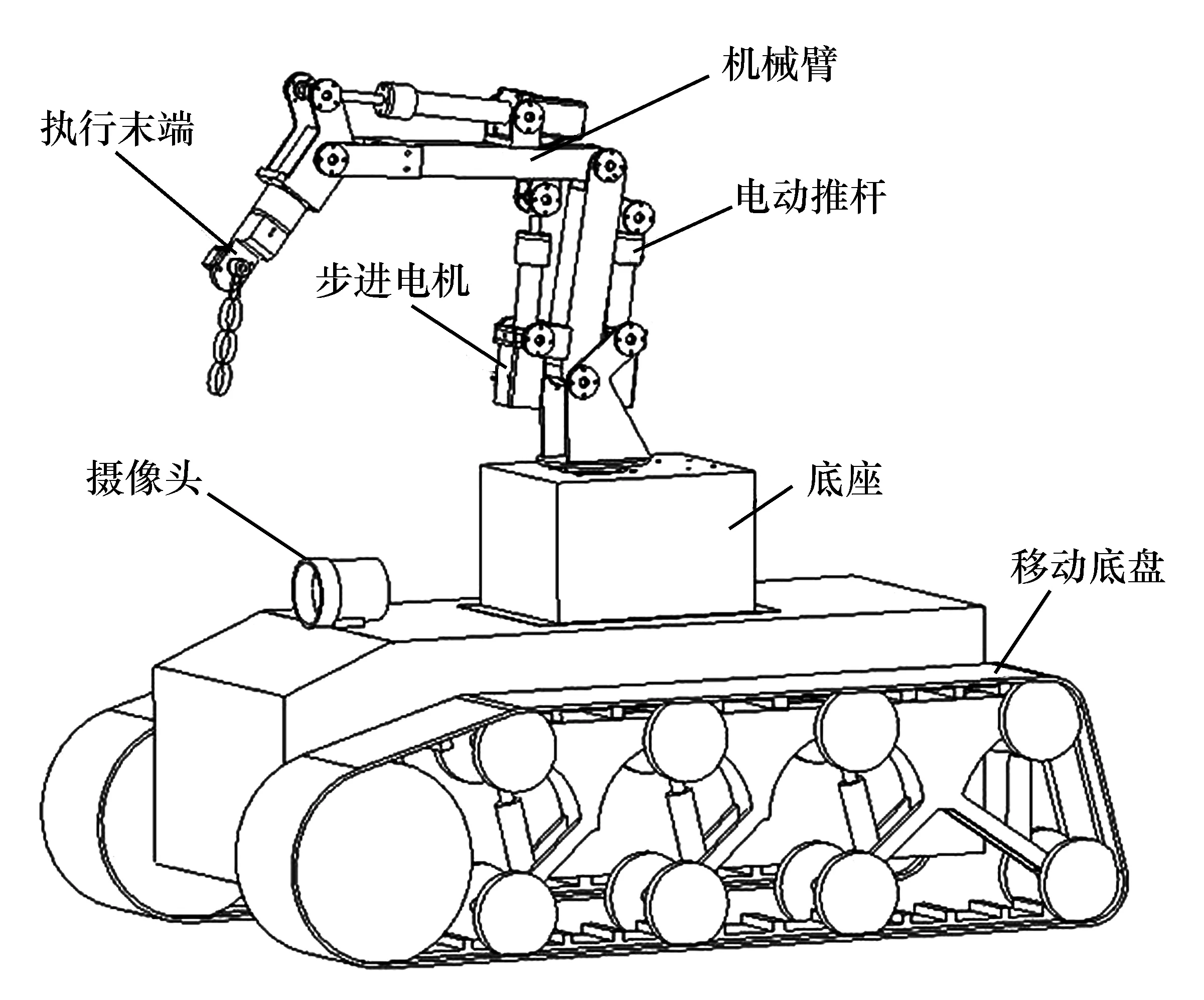
图1 综合实验平台总体架构
1.1 移动底盘
底盘由伺服电机驱动,内置锂电池为整机供电以减轻底盘的重力以及体积。底盘采用左右两侧的履带式机构,可以实现原地调头、攀越障碍物等功能,并为六自由度机械手提供承载平台。
1.2 六关节机械手
采用了自动搬运、装配、喷涂、焊接等工业现场常用的关节型串联机械手形式[10-12],拉近了教学现场与工业现场的距离。机械手通过底座安装在底盘上,由大、中、小3个臂以及转盘关节、第一肩关节、第二肩关节,肘关节、旋转关节、腕关节6个关节组成,由步进电机驱动各关节,并实现机械手的多种复杂轨迹运动。执行机构为手抓、喷枪、焊枪等,能够模拟工业机器人的物料抓取、装配、工业喷涂、焊接等作业。
1.3 控制系统
控制系统以STM32作为核心控制元件,包括车载式控制系统及手持式控制系统,并基于4G、WiFi等的无线通信技术实现与两控制系统的信息交换。设置开放式的数据输入输出接口,可自行配置接口的参数及功能定义,以方便传感器及执行器的后期拓展。
2 综合实验平台控制系统
2.1 控制系统总体架构
控制系统包括车载式控制系统及手持式控制系统,基于4G、WiFi等的无线通信技术实现对机械手及移动底盘的无线自动控制以及数据采集。基于模块化的控制系统软件设计包括操作与监测层、运动规划与控制层以及基础控制层的程序模块。程序源码完全开放,可以实现对各功能模块的编辑及调试。基于Matlab/Simulink开发的数据接口实现了非完整约束移动机器人与虚拟仿真实验教学平台的实时数据同步[13]。综合实验平台控制系统总体架构见图2。
操作与监测层采用基于ARM Cortex-M4内核的STM32为控制器,负责连接按键、摇杆等硬件设施,并通过无线通信的方式与车载控制系统交换信息。在操作与监测层中将实时采集机械手的位姿信息与底盘前置摄像头拍摄到的图像实现实时显示。摇杆与按键配合操作更加符合人机交互的需要。
运动控制与规划层主要由STM32主控制器完成整机的运动控制、机械手的轨迹规划与操作层信息传递等,并实时计算机械手当前位姿,对传感器信号进行响应。
基础控制层则由电机驱动器、电机、执行机构与限位传感器组成。机械手由步进电机及其配套的驱动器驱动,从而可以满足机械手的运动精度要求。履带底盘则由2个扭矩较大的直流电机相互配合通过差动方式驱动[14-15],且履带与地面接触面积比普通车轮更大,所以履带底盘的灵活性、机动性更强。3个部分相互联系、相互配合组成整机的控制系统。
2.2 综合实验平台操作控制器设计
实验平台操作控制器包括车载式控制器及手持式控制器。手持控制器即为操作与监测层的控制器,由STM32与摇杆、按键、机械手位姿显示屏、实时图像显示屏等外设连接,并通过无线通信的方式与车载控制器进行信息交换,可对整机进行操作与监测。车载控制器为本实验平台的下位机控制器,并跟随底盘一起移动,位于运动控制与规划层及基础控制层,其采用STM32作为核心控制单元,负责移动平台与机械手的运动规划与控制,可接收手持控制器的指令,并在执行相应动作的同时实时传输机械手位姿等信息。车载控制器也配备摇杆、按键与一块LCD触摸屏,可独立对本实验平台进行操作。图3所示为手持式控制器与车载式控制器面板。

图2 控制系统总体架构

图3 手持式控制器与车载式控制器面板
3 综合实验平台功能和实验教学内容设置
3.1 综合实验平台功能
本综合实验平台主要作为机械类、机电结合类专业的学生多门课程知识点学习和综合运用的平台。根据 “认知——实践——创新”的思想,将该综合实验平台的设计、仿真、制造、控制作为典型教学案例,贯穿于多门课程实践教学活动中,主要围绕基础课程、专业课程的实践、课程设计等3个环节展开,实现了机器人设计、制造、测控系列课程中的关联知识点有机衔接。主要开设课程实验有:
(1) 基础课程如机械原理、机械设计基础课程,依据该综合实验平台,使学生直观理解机器的组成、运动副的分类及定义(各关节的转动副、电动推杆的移动副等)、自由度的定义及运算、机械传动方法等内容,也易于提高学生学习兴趣。
(2) 专业课程如机器人学课程,要求学生根据给定的非完整约束移动机器人原始数据(机构工作空间、运动学/动力学参数),进行逆运动学分析、工作空间分析、刚体动力学分析、伺服电机参数预估、末端空间直线以及弧线轨迹规划等,建立相应的数学模型、编写计算机程序,并实现对关节机械手的实际运动控制,完成特定的抓取、搬运等功能。又如虚拟样机技术课程,根据非完整约束移动机械手的实际物理参数让学生建立其UG、PROE等三维几何模型,并导入虚拟样机软件(如ADAMS)中,构建运动学及动力学仿真模型,基于ADAMS/Matlab的控制器协同仿真技术,实现非完整约束移动机器人物理控制器与虚拟模型的联合仿真,直观体验设计方案的可行性及运行效果,也使学生能够学习到现代的设计手段。
3.2 综合实验平台教学内容的设置
(1) 验证类实验。为让学生了解机械手控制系统各硬件模块功能,设置各控制模块的开放接口,用以完成各类器件的基本性能测试,如六关节机械手的轨迹控制测试实验、基于4G的无线数据通信测试实验等。
(2) 拆装类实验。主要让学生依据技术标准进行机械手机械零部件的拆装实训、控制系统安装及连接实训等,熟悉该工业机械手的各项操作功能,了解各零部件的装配关系及安装参数要求,理解控制柜中各类器件的布局和走线设计所遵循的一般原则等。
(3) “模块填空”类实验。这类实验属于单项设计实验,学生掌握了该综合实验平台机械结构、控制系统硬件、软件的组成及工作原理之后,学生自选设计模块,充分展现各自的想象力和创造力,设计出充满个性的子系统控制功能。
(4) 综合设计联调类实验。整合设计、虚拟仿真及分析、程序调试验证的过程,学生逐步设计、调试各个软件模块,最后完成一个中等复杂程度的完整的系统软件的设计,如完成机器人排爆、机器人搬运、机器人灾难现场探测等综合性实验。让学生能从整体上把握系统软件各层次的设计思路,分析掌握各软件模块间的接口关系以及各软件模块设计的先后顺序和联调关系,获得进行综合联调类项目的设计和实践经验。
(5) 设计研发能力的培养。非完整约束移动机器人综合实验平台涉及机械类课程、机电类课程等知识的综合学习与应用。通过对机械工作原理认知、机械结构设计、机械系统仿真、控制模块单项设计,并提升到机器人机电联合系统的开发研究,能够让学生比较系统地梳理自己所学知识并加以应用,掌握产品设计研发的过程,熟悉规范的科学研究方法,提高学生的动手能力,增强了学生的自信心。
4 综合实验平台的教学特色与教学效果
综合实验平台是针对授课中出现的问题而设计的,与课程紧密结合,与课程的授课内容相关性高。综合实验平台能很好地贴近真实的机器人技术,让学生了解机器人的工作原理以及控制方法,树立科学意识,掌握科学方法和实验操作技能。该实验平台具有以下鲜明的教学特色:
(1) 从技术先进性看,平台的技术方案结合了当代热门的机器人技术及智能化技术,容易引起学生的学习兴趣,从而激励学生深入探究机器人结构、机器人运动控制、STM32控制系统开发、PLC控制系统开发、GPS定位、无线数据采集等知识和技能。
(2) 从结构灵活性角度看,平台可以根据功能需求自由拆装组合,组合后能产生不同的效果。如可以更换不同的机械手末端执行器,实现物体搬运、喷涂、路面清洁等功能;也可将移除部分机械手臂或关节,使机械手变成五自由度机械手或四自由度机械手等,教学灵活性高。
(3) 从控制系统学习角度看,控制系统中开放式的数据输入/输出接口易于实现设备功能的拓展,如增加超声波传感器,可实现自动避障;连接各种有害气体和物质的检测传感器,便可实现对事故现场的远程勘测等功能。以上均达到举一反三的效果,启发学生根据这一实验平台,去联想其他的应用以及相应的实现方案,并在此设备基础上进行功能拓展及验证。
(4) 从知识综合运用角度看,平台综合了机械原理、机械设计、虚拟仿真、制造工艺、机电一体化技术、机器人、程序设计、通信技术等知识,涵盖了大部分机械类、机电结合类专业学生的相关课程,将其作为典型案例,贯穿相关课程的课程实验,学生以小组为单位完成用于特定工作机构(或其变型)的设计、分析、仿真、制造、控制等工作,完整地体验产品的设计与制造全过程,引发学习兴趣和思考,有利于学生主动参与、合作交流,提高学生实际动手能力、分析和解决工程问题能力,以及合作学习和协同工作能力,对学生的知识的综合运用起到很好的启发作用。
我校以该综合实验平台为载体,整合设计、仿真、制造、测控4大系列课程的教学内容,创新基础课程及专业课程实验教学方法,应用于本科生课程设计、毕业设计以及学生课外创新实践和研究生的课题研究中,并精心编写了所需的实验教材、指导书等教辅材料。从学生的反应和实际操作来看,该综合实验平台使学生把有关机械原理、虚拟仿真、制造工艺、机电一体化技术、机器人、程序设计、通信技术等课程的知识有机的结合起来,极大地提高了学生学习的兴趣和积极性,培养了学生实际应用和综合创新能力。
5 结论
(1) 所研发的综合实验平台构思巧妙,通过开放性的输入输出接口,用可反复重构的模块化硬件、组件式软件构成积木式完全开放的柔性综合教学平台,实现一机多用的同时提高了教学效果。
(2) 综合实验平台基于ADAMS/Matlab开发的控制器协同仿真技术,能够在虚拟环境中测试控制器对虚拟机械手的运动控制过程,实现了虚拟仿真实验和实体实验的紧密结合和综合应用,教学内容新颖、教学方法先进。
(3) 综合实验平台可为学生提供基础性、综合性、设计性及研究性一系列实验的系统学习,使学生把有关机械原理、机械设计、虚拟仿真、制造工艺、机电一体化技术、机器人、程序设计、通信技术等课程的知识有机的结合起来,同时将课程学习及实验与实际工业应用联系起来,通过对工业机器人硬件设计、安装调试和软件开发等创新设计,实现研究性学习,极大地提高了学生学习的兴趣和积极性,培养了学生实际应用和综合创新能力,满足现代工业企业对综合技能人才的需求。
(4) 将具有自主产权的科研成果用于教学,增进了学生对学科前沿与发展动态的了解,激发了学生的学习兴趣。以该综合实验平台为载体,将培养学生创新能力和主动实践能力的理念贯穿于课程教学和实践教学的全过程,创新了教学模式。该成果目前共申请4 项国家发明专利,其中2项已获得授权。
References)
[1] 梅红. 移动机械手的逆运动学及滑模变结构轨迹跟踪控制研究[D].济南:山东大学, 2009.
[2] 张晓丽. 移动机械手系统运动学分析及动力学初探[D]. 天津:河北工业大学, 2006.
[3] 李新春. 基于运动学的移动机械手协调路径规划的研究[D]. 北京:中国科学院自动化研究所, 2006.
[4] 鞠升辉,李杨民.非完整约束移动机器人论域自调整模糊控制研究[J]. 电子设计工程,2016(5):103-106.
[5] 刘才山.分析动力学中的基本方程与非完整约束[J]. 北京大学学报(自然科学版),2016(4):756-766.
[6] 董文杰, 霍伟. 受非完整约束移动机器人的跟踪控制[J]. 自动化学报, 2000, 26(1):1-6.
[7] 刘磊, 向平, 王永骥,等. 非完整约束下的轮式移动机器人轨迹跟踪[J]. 清华大学学报(自然科学版),2007,47(增刊2):1884-1889.
[8] 师名林. 移动机械手动力学建模及其仿真研究[D]. 天津:天津理工大学, 2007.
[9] 许永华. 基于信息融合和多行为决策的自主机器人导航系统[D]. 武汉:中南大学, 2002.
[10] Craig J J.机器人学导论[M].贠超,译.3版.北京:机械工业出版社, 2006.
[11] Niku S B. 机器人学导论: 分析、控制及应用[M].孙富春,朱纪洪,列国栋,等译.2版.北京:电子工业出版社, 2013.
[12] Siciliano B, Sciavicco L, Vllani L, et al. Robotics: modelling, planning and control[M].Spriger Science & Business Media, 2010.
[13] 刘卫国. MATLAB程序设计与应用[M]. 北京:高等教育出版社, 2002.
[14] Rigelsford J. Introduction to Autonomous Mobile Robots[M]. MIT Press, 2005.
[15] 布劳恩. 嵌入式机器人学[M].西安:西安交通大学出版社, 2012.
Development and application of comprehensive experimental platform for mobile robot with nonholonomic constraint
Wei Jin, Sun Yuxi, Meng Yanmei, Dong Zhen, Tang Zhihong
(College ofMechanical Engineering, Guangxi University, Nanning 530004, China)
This comprehensive experimental platform adopts the development method of hardware modularization and software component. Through the open input and output interfaces, a block-type, entirely open and flexibly comprehensive teaching platform is built by using the modularized hardware and component software which can be repeatedly reconstructed, which has high flexibility and scalability. The experimental platform provides the learning of basic, comprehensive and designable experiments in many courses for the students. It links the course learning and experiments to the real industrial application, which further promotes the innovative design and research-oriented learning about the hardware design, installation and adjustment, and software development of the industrial robots, enhances the students’ learning interest and enthusiasm, cultivates their practical application and comprehensive innovation abilities, and meets the demand of the modern industrial enterprise for comprehensive skilled talents.
mobile robot;comprehensive experimental platform; modularized design
10.16791/j.cnki.sjg.2017.01.018
2016-07-18 修改日期:2016-09-01
新世纪广西高等教育教学改革工程资助项目(2015JGA124)
韦锦(1987—),男(壮族),广西南宁,硕士,讲师,研究方向为虚拟样机技术
E-mail:jixiegong@163.com
蒙艳玫(1963—),女,广西南宁,博士,教授,博士生导师,国家级广西大学机械工程虚拟仿真中心主任,主要研究方向为虚拟样机技术、机电系统智能检测与控制技术.
E-mail:gxumengyun@163.com
TP24;G484
A
1002-4956(2017)1-0074-05
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
