
直流电机组开/闭环控制实验系统设计
2017-02-10 08:54吕淑平胡健军
实验技术与管理 2017年1期
吕淑平, 许 红, 胡健军
(哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001)
仪器设备研制与应用
直流电机组开/闭环控制实验系统设计
吕淑平, 许 红, 胡健军
(哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001)
根据“自动控制元件”实验课程需求,在研究驱动控制电路、电机控制方法以及恒速控制原理基础上,基于飞思卡尔单片机设计并实现了直流电机组开/闭环控制实验系统,给出系统整体设计方案、主要硬件电路设计以及嵌入式软件设计方法。设计的双闭环控制系统不仅很好地实现了直流伺服力矩电动机、直流测速发电机工作特性测试和电机恒速控制等实验项目,还有效地解决了电机驱动发热问题。经反复实验测试,系统可靠性高,适合学生实验。
实验系统; 直流电机; 恒速控制
控制元件是自动控制系统重要的组成部分,设计一套性能优良的自动控制系统必须熟练掌握控制元件的工作特性、工作原理和使用方法[1]。自动控制元件课程是工科高等院校自动化类专业普遍开设的一门专业基础课。课程通过相关实验,使学生掌握自动控制系统中典型控制元件的工作特性和使用方法,为今后学生正确选用控制元件,进行控制系统设计打下基础[2]。直流电机作为执行元件和测量元件被广泛应用于自动控制系统中[1]。
本文根据自动控制元件实验课程需求,设计开发了一套直流电机组开/闭环控制实验系统。该系统可以完成永磁式直流测速发电机(以下简称测速发电机)、永磁式直流伺服力矩电动机(以下简称电动机)以及电机恒速控制等实验项目。
1 系统总体方案
1.1 实验系统组成
实验系统包括控制箱和实验台架两部分,实验台架由测速发电机、电动机和摩擦力矩测试部件组成。实验时控制箱在开环工作状态下为电动机提供0~24 V控制电压、为测速发电机提供不同的负载电阻;控制箱在闭环工作状态下,将测速发电机作为反馈元件与电动机组成有差闭环控制系统,完成电动机恒速控制。为提高电动机在实验过程中的可靠性和安全性,实验系统采用全数字双闭环控制结构。闭环控制系统框图见图1。
控制系统硬件设计主要包括:单片机最小系统模块、电动机驱动模块、转速测量电路、电流传感器电路、电动机驱动接口、测速发电机接口、电位器接口、开/闭环控制电路和串口液晶屏显示电路等;控制系统软件设计主要包括:开/闭环选择程序、电动机驱动程序、转速调节程序、转速采集程序、恒速控制算法程序、电流检测程序和串口液晶显示程序等。
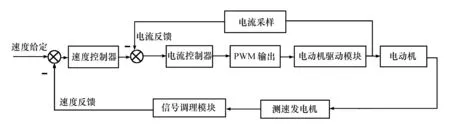
图1 闭环控制系统框图
1.2 恒速控制原理分析
根据课程要求,采用比例控制器构建有差闭环系统,稳速调节过程如图2所示。


图2 稳速调节过程
2 控制系统硬件设计
2.1 单片机最小系统
控制系统采用Freescale公司K60最小系统板,主要由主芯片、复位电路、晶振电路和I/O端口等组成,其引脚多且功能模块齐全[3]。该最小系统主要完成对外部各类数据的采集,并根据系统当前工作状态进行相应的数据处理和显示,发出可改变占空比的PWM波[4-5],控制电动机转速等。K60最小系统见图3。
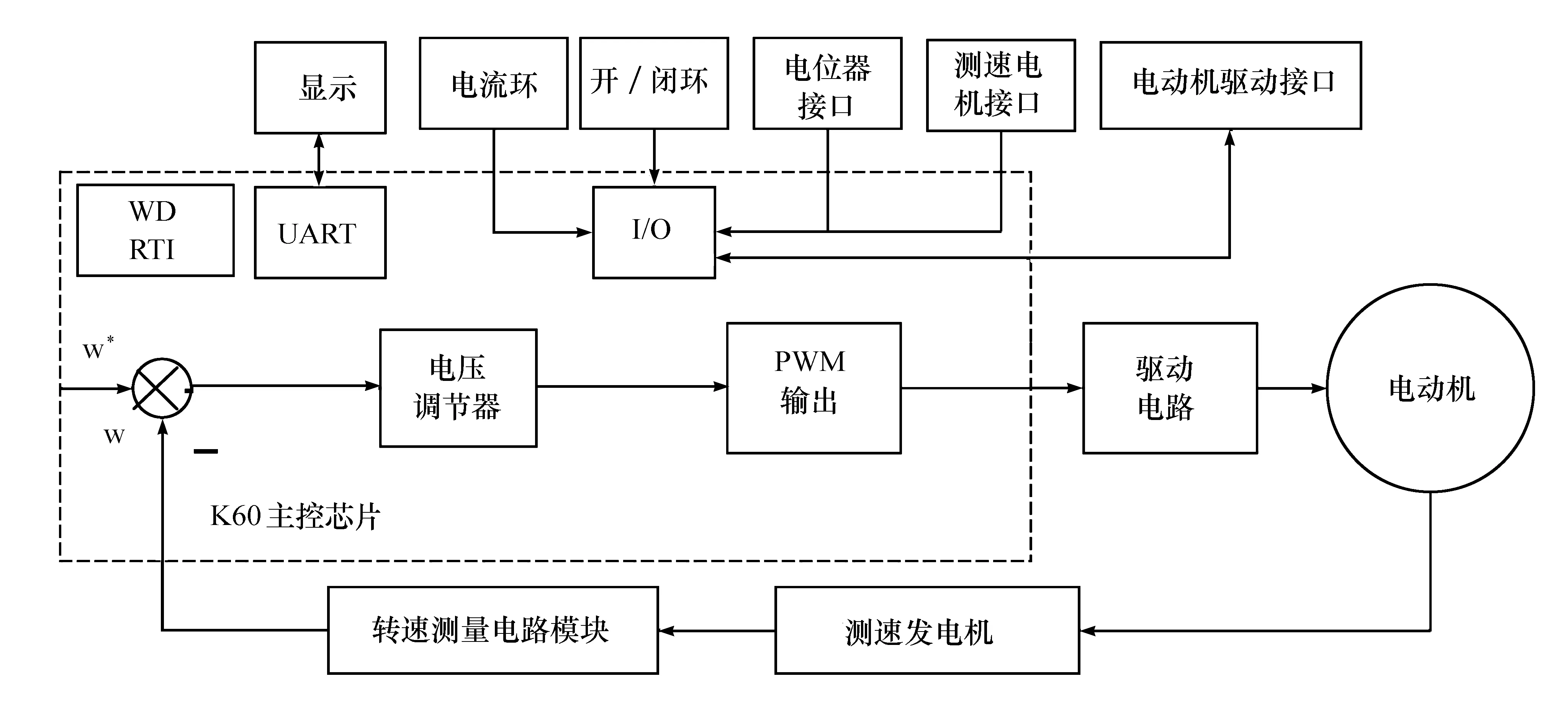
图3 K60最小系统
2.2 电源分配
根据实验系统需求,设计了多种直流电源模块,电源分配见图4。开关电源将交流220 V输入转换为36 V直流电,为电动机供电;LM2576稳压芯片将36 V电压转化为5 V[6](电路见图5(a)),为串口液晶屏以及控制板上的一些电路提供5 V电源;TPS76833稳压芯片将5 V电压转化为3.3V[7](电路见图5(b)),为K60核心系统板和控制板中一些电路提供3.3 V电源;BO512S电源转换芯片将5 V转换为12 V[8],为驱动电路提供12 V使能电压。

图4 系统电源分配

图5 5 V与3.3 V电源电路
2.3 电动机驱动模块
电动机驱动控制电路由光电隔离电路TLP512-4、门极驱动芯片MC33883、H型桥式驱动电路组成[9],其结构如图6所示。
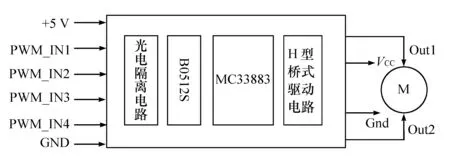
图6 电动机驱动控制电路结构
本设计采用门极驱动芯片MC33883和4个相同的N沟道功率场效应管IRF1404组成H桥电路,具备较好的性能和较高的可靠性,并具有较大的驱动电流[10]。图7为H桥驱动模块电路原理图。
3 控制系统软件设计
控制系统软件主要包含两大部分,一是开环,二是闭环。在开环状态下,根据实验要求主要完成电动机控制特性和机械特性的测试以及测速发电机输出特性的测试;在闭环状态下,通过采集测速发电机转速与给定转速进行比较得到偏差,通过比例控制器实现对电动机恒速控制[11]。控制系统程序整体流程见图8。由于篇幅有限,本文只给出闭环状态下相关程序设计方法。

图7 H桥驱动电路原理图

图8 控制系统程序整体流程图
3.1 速度采集程序
系统输出转速是由反馈元件,即直流测速电机得到的,首先采集测速发电机的输出电压,根据比例关系再转化为相应的速度。速度采集流程图见图9。
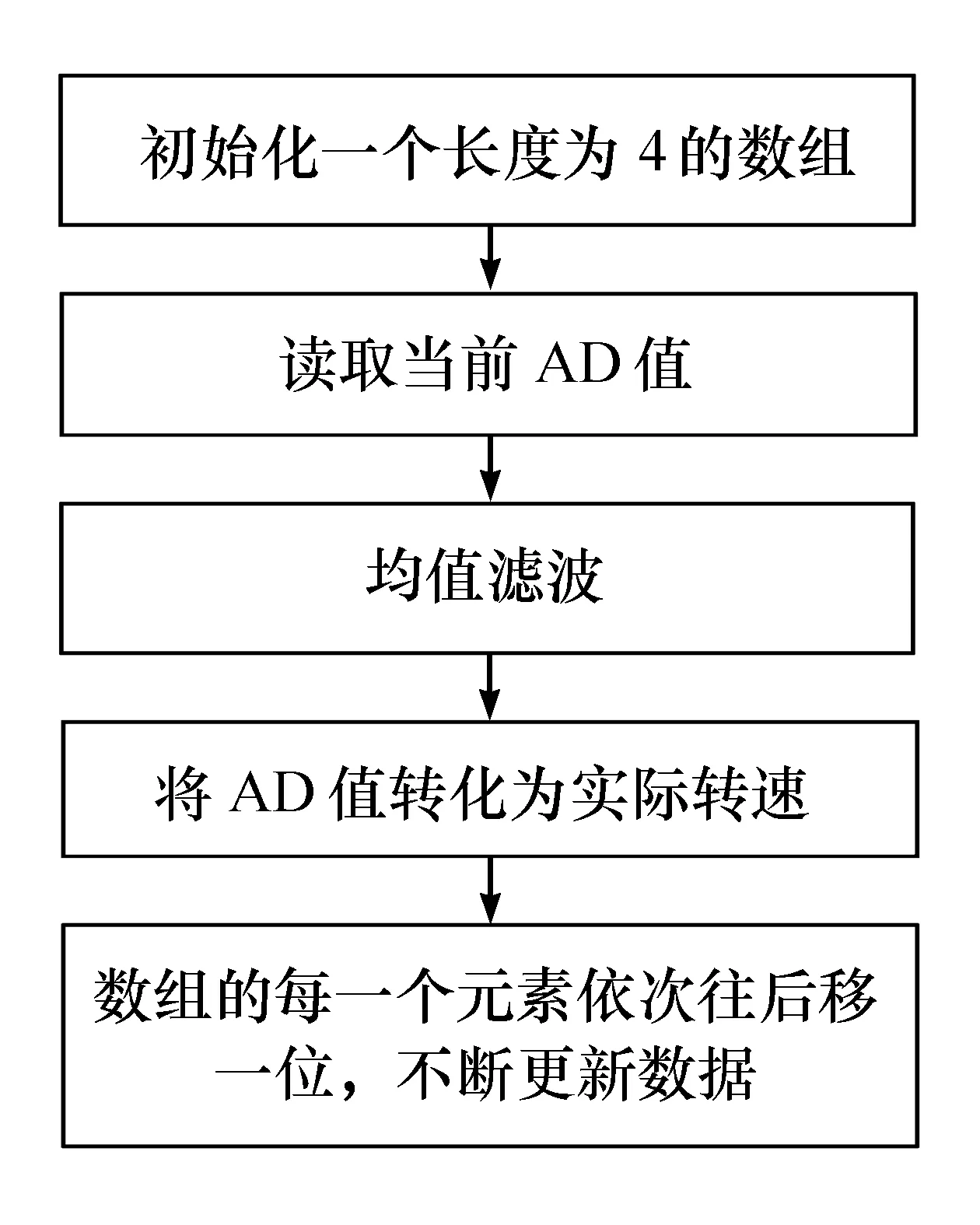
图9 速度采集流程图
3.2 恒速控制程序
要保证系统输出速度不随负载变化而变化,就必须加上速度环,构成闭环系统。为使控制效果更好,本文采用分段控制方法,即在不同时间段内施加不同的比例系数。当偏差较大时,需要比例环节作用强以快速减少误差;但比例系数过大会使系统出现振荡现象,因此当偏差较小时,将比例系数降下来确保系统稳定。恒速控制流程图见图10。
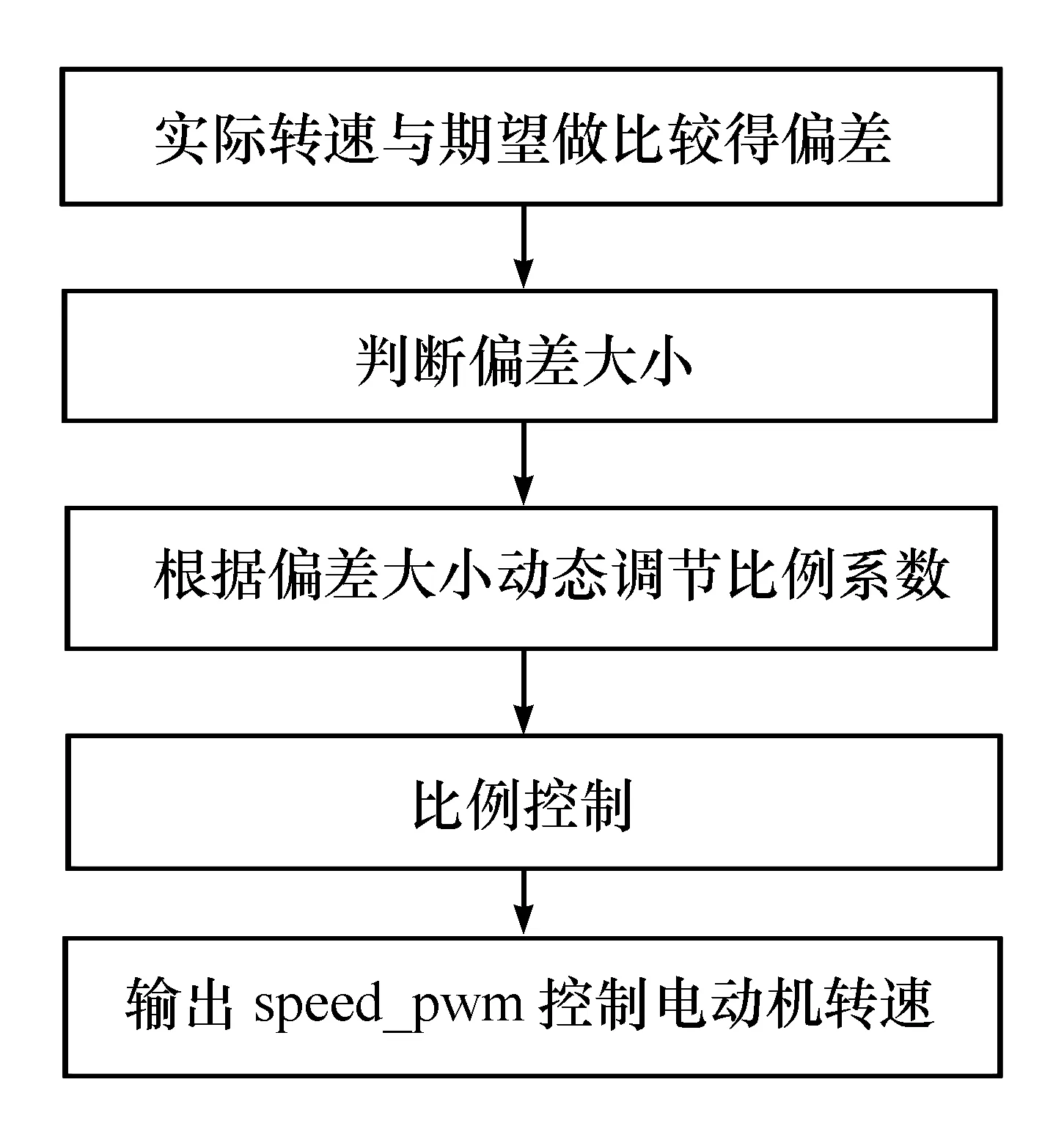
图10 恒速控制流程图
3.3 电流检测程序
电流检测模块是为了提高实验设备的可靠性和安全性,避免电动机在较长时间堵转时,绕组内电流过大,烧毁电动机。采用电流传感器ACS712构成电流检测模块[12],串联到电路中作为系统的电流环。当检测到电动机绕组内电流超过一定范围且持续一段时间后,使PWM占空比为0,电动机停止工作,保护电动机不受损坏。使用时,一端的两个引脚串联到电路中,另一端引脚输出与电流成比例的AD值。程序设置一个5 ms定时中断,5 ms一到就进入定时中断服务程序,读取电流AD值,均值滤波后,根据比例关系得到实际电流的大小。
4 实验项目测试
研制的控制箱外观如图11所示。

图11 控制箱外观
4.1 直流测速发电机实验
实验内容:直流测速发电机的空载(RL=Inf)、负载输出特性测试。首先将控制箱闭环/开环选择开关置于开环位置,用皮带将电动机和直流测速发电机连接起来,通过调节加载在电动机电枢两端的控制电压,使测速发电机输出不同转速。测得的测速发电机的空、负载输出特性见图12。

图12 测速发电机空、负载输出特性
由图12可知,有负载的情况下,电枢回路中会产生电流,内阻Ra上也会产生一部分压降,导致测得的输出电压略小于感应电动势,从而造成空、负载输出特性不同;当负载RL不同,电枢回路中产生的电流不同,Ra上产生的电压降不同,会导致输出特性的斜率Kef(即灵敏度)不同,负载RL越大,灵敏度Kef越大。
4.2 直流伺服力矩电动机实验
实验内容:电动机的机械特性和控制特性测试。首先将控制箱闭环/开环选择开关置于开环位置,拆下电动机和测速发电机之间连接皮带。测得的电动机机械特性和控制特性见图13和图14所示。

图13 电动机机械特性
由图13可知,在控制电压Ua一定条件下,由n=Ua/CeØ-TemRa/CeCmØ2(Ce为电动机电势系数,Cm为电动机转矩系数,Ø为主磁场每极下磁通)可知:随着负载转矩Tem的增大,转速n降低;在负载相同的情况下,随着控制电压Ua的增大,转速n增大。

图14 电动机控制特性
由图14可知,负载一定条件下,根据n=Ua/CeØ-TemRa/CeCmØ2可知:随着控制电压Ua的增大,转速n增大;在相同控制电压下随着负载转矩Tem的增大,转速n降低。
4.3 恒速控制实验
实验内容:闭环控制状态下,电动机机械特性测试。首先将控制箱闭环/开环选择开关和负载选择开关置于闭环位置,用皮带将电动机和测速发电机连接起来,组成闭环控制系统。给定期望转速n0恒定不变,电动机稳态转速随负载转矩变化。得到的电动机恒速控制特性见图15。

图15 直流伺服力矩电动机恒速控制特性
由图15可知,给定的期望转速是1 540 r/min,当负载转矩改变时,电动机的转速变化不是很好,可以看出闭环状态下电动机的机械特性硬度明显提高了。图15效果不是很明显的原因是纵坐标不是从0开始的。由于系统采用的是比例控制器必然会有静差存在,用静差去平衡那个变化的负载转矩。
5 结论
本文基于实验课程需求,自行研制了直流电机组开/闭环控制实验系统。该系统可以完成直流测速发电机空、负载输出特性的测试、直流伺服力矩电动机机械特性和控制特性的测试以及电动机恒速控制等实验项目。经反复实验测试,系统可靠性高,适合学生大规模实验,达到了预期的设计效果。
References)
[1] 池海红,单蔓红. 自动控制元件[M]. 北京:中国电力出版社, 2009.
[2] 史震,张鹏,巩冰.自动控制元件[M].北京:国防工业出版社,2013.
[3] 汪玉珍. 基于 32 位微控制器与线性 CCD 避障的智能车设计[J]. 中国新通信, 2015,17(17):97.
[4] 吕娣. 基于单片机生成 SPWM 信号控制电机实现变频调速的设计[J]. 电脑知识与技术, 2014(12):8320-8321.
[5] 高远, 祝玲, 钟坤芳. 无线倒车雷达的设计与实现[J]. 电子世界, 2015(20):55-58.
[6] 王恒. 基于 LM2576 的高可靠 MCU 电源设计[J]. 中国西部科技, 2006(29):22-23.
[7] 欧阳磊. 基于自整定 PID 控制器的温度控制系统研究[D].合肥:安徽理工大学, 2009.
[8] 刘毅, 王聪. 基于单片机的升压电路设计与仿真[J]. 科技信息, 2011(7):66-67.
[9] 袁涛. H 桥功率驱动电路的设计研究[D].成都:电子科技大学,2005.
[10] 徐灏, 郑逸璇, 鄢博. 基于北斗二代的铁路沉降实时监测系统设计[J]. 科技信息, 2012(20):148-149.
[11] 吕淑平,王潇.水温控制实验系统设计[J].实验室研究与探索. 2013,32(1):60-63.
[12] 董建怀. 电流传感器 ACS712 的原理与应用[J]. 中国科技信息, 2010(5):92-93.
Design of experimental system of open and closed loop control for DC motor set
Lü Shuping, Xu Hong, Hu Jianjun
(College of Automation, Harbin Engineering University, Harbin 150001, China)
According to the needs of the experimental course of Automatic Control Component, on the basis of the research on the drive control circuit, motor control method and principle of constant speed control, and based on Freescale MCU, the experimental system of open and closed loop control for the DC motor set is designed and realized. The overall design plan for this system, the design method of the main hardware circuit and the embedded software design method are presented. The designed double loop control system not only realizes the experimental projects such as working characteristic test of DC servo torque motor and DC speed-measuring generator, and the motor constant speed control, but also effectively solves the motor driven heating problem. After repeated experimental tests, the system has high reliability and is suitable for the large-scale experiments for the students.
experimental system; DC motor; constant speed control
10.16791/j.cnki.sjg.2017.01.017
2016-07-28 修改日期:2016-08-30
黑龙江省高等教育教学改革项目(JG2014010671);哈尔滨工程大学2016年本科教学改革研究项目(JG2016BZD09)
吕淑平(1963—),女,黑龙江哈尔滨,博士,教授,实验教学中心主任,主要研究方向为实验室建设与管理.
TP273;G484
A
1002-4956(2017)1-0069-05
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
装备制造技术(2017年6期)2017-07-31
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
电测与仪表(2015年3期)2015-04-09
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
实验技术与管理(2014年9期)2014-03-11
