电子皮肤触觉传感器研究进展与发展趋势
2017-02-08 06:50曹建国周建辉缪存孝尹海斌李维奇
哈尔滨工业大学学报 2017年1期
曹建国 , 周建辉, 缪存孝, 尹海斌, 李维奇, 夏 飞
(1.北京科技大学 机械工程学院,北京 100083;2.加州大学圣地亚哥分校 雅各布斯工学院,圣地亚哥 92093;3.华北理工大学 迁安学院,河北 唐山 064400;4.武汉理工大学 机电工程学院,武汉 430070)
电子皮肤触觉传感器研究进展与发展趋势
曹建国1, 2, 周建辉1, 3, 缪存孝1, 尹海斌4, 李维奇1, 夏 飞1
(1.北京科技大学 机械工程学院,北京 100083;2.加州大学圣地亚哥分校 雅各布斯工学院,圣地亚哥 92093;3.华北理工大学 迁安学院,河北 唐山 064400;4.武汉理工大学 机电工程学院,武汉 430070)
从介绍人类皮肤的触觉感知性能出发,全面综述了国际上多学科领域模拟人类皮肤的电子皮肤触觉传感器研究进展与关键技术;分析讨论了电子皮肤触觉传感器的工作原理、新型材料和结构、先进设计制作方法、触觉传感特性和性能指标等方面内容;重点总结了国内外近年来在电子皮肤阵列触觉传感器柔性化、弹性化、空间分辨率、灵敏度、快速响应、透明化、轻量化和多功能化等方面的研究进展.指出了电子皮肤触觉传感器的研究依然存在着难以兼顾高柔性和高弹性、高灵敏度电子皮肤设计制作工艺复杂,可扩展性差和成本高等技术难题.电子皮肤触觉传感器可广泛应用于机器人、医疗健康、航空航天、军事、智能制造和汽车安全等领域,正朝着高柔弹性、宽量程的高灵敏度、多功能、自愈合与自清洁、自供电与透明化等方向发展.
电子皮肤;传感器;柔弹性;触觉; 仿生机器人
“随着信息化、工业化不断融合,以机器人科技为代表的智能产业蓬勃兴起”,人们期待未来能够研发出与人和生物更加接近的仿人仿生机器人[1-2].当前,机器人技术的发展特点和趋势是智能化以及人与机器人的交互共融[3].传感器技术是机器人智能化的先决条件,电子皮肤触觉传感器Tactile Sensor for E-Skin[4]作为非常重要的可穿戴设备之一,直接关系到下一代机器人、医疗设备、人体假肢和可穿戴设备等载体的智能化和多功能化,受到了多学科研究人员的高度重视,符合未来发展需求,近年受到《Science》等国际著名科学期刊的持续广泛关注和积极评价,成为当今国际学术研究的热点问题之一[4-7].
触觉是机器人等实现与环境直接作用的必需媒介,触觉本身有很强的敏感能力,可直接测量对象和环境的多种性质.触觉传感器的研究从严格的工业领域到与人、社会接触等多领域,根据传感器本身的软、硬包覆层和覆盖应用范围,触觉传感器通常可分为3类[8]:第1类是硬质皮肤(Hard skins)触觉传感器,主要有力/力矩传感器、力敏电阻传感器、加速度计和变形传感器等.这类硬质皮肤通常包含多个触觉传感器,通过多传感器的均值来提供比单一传感器更好的测量分辨率.如西班牙加泰罗尼亚技术大学的工业机器人,手臂上安装这种有触觉传感器的硬质皮肤可用来检测碰撞、测量接触力和接触位置等[9];哈尔滨工业大学蔡鹤皋院士等[10]在弧焊机器人上应用该类触觉系统可检测3个方向的力,完成三维空间焊缝的自我示教;日本早稻田大学的52-DoF仿人机器人WENDY手臂上安装了6轴力/力矩传感器(每个手臂6个)和力敏电阻传感器,可检查接触状态和位置,以及接触力的大小、方向和持续时间,并能同时测量多个接触[11],但空间分辨率受到限制,一般大于100 mm2.第2类是近年国际上重点研究的柔性皮肤(Soft Skins)[8]或人工皮肤(Artificial Skin)或电子皮肤(Electronic Skin)触觉传感器[4,12-22].电子皮肤触觉传感器[4,12-15]被定义为能够通过接触表征出被测物体的性质(表面形貌、重量等)或数值化接触参量(力、温度等)的设备或系统.电子皮肤触觉传感器,又名新型可穿戴仿生触觉传感器,是贴在“皮肤”上的电子设备,因而习惯性地被称为电子皮肤[18-19],或敏感皮肤(Sensitive Skin)、智能皮肤(Smart Skin)、仿生皮肤(Bionic Skin)等[4,13-19].电子皮肤触觉传感器大多被排列成矩阵组成阵列触觉传感器,电子皮肤阵列触觉传感器的空间分辨率可达到毫米级,接近人类的皮肤.由于电子皮肤触觉传感器可覆盖于机器人、医疗设备与人体假肢等复杂的三维载体表面,并准确感知周围环境的各种信息,成为机械、电子、仪器和医学等领域的研究热点之一.第3类是内接触式触觉传感器,用来检测机器人各部分的状态,而不是检测被测对象周围的外部信息,其表面没有任何的覆盖和皮肤保护,如工业机器人手臂关节/力矩传感器,在非人机交互领域如工业结构环境下已完善应用多年,其不足之处就是可提取的触觉信息相当有限,如空间分辨率相当低且接触位置难以确定[8].为了覆盖机器人等复杂的三维表面和活动的关节部位,电子皮肤阵列触觉传感器通常还必须具有高柔性与高弹性等,美日等发达国家和我国近年均投入了巨大的人力与物力,至今仍是研究的重点与难点[4-9],电子皮肤触觉传感器研发需要综合运用多学科知识,以满足机器人、医疗健康、航空航天、军事、智能制造、汽车安全和手机与电脑的触摸式显示屏等多领域需求,具有广泛应用前景.
1 人类皮肤与触觉感知性能
人类皮肤能感知触觉、痛觉、热觉等多种感觉,其中触觉的感知尤为重要[4,17].人的触觉主要通过分布在皮肤不同深度的大量机械刺激感受器中的4种触觉感受器(见图1(a))感知[23-25]:表层皮肤中的迈斯纳小体和皮肤深层的环层小体均为快速适应感受器,前者可快速响应3~40 Hz低频动态范围窄的外界刺激,实现低频振动和运动检测与握力控制等感觉功能;后者可快速响应40~500+Hz高频动态范围宽的外界刺激,实现高频振动和工具使用等感觉功能;与之相对的是,分布于全身表皮基底细胞之间的一种具短指状突起的默克尔细胞和位于真皮内的长梭形的鲁菲尼小体均是慢适应感受器,前者可慢响应0.4~3.0 Hz低频动态范围窄的空间变形、持续的压力,曲面、边缘甚或尖角等外界刺激,实现模式/形态检测与纹理感知等感觉功能;后者可慢响应100~500+Hz高频动态范围宽的持续向下的压力、横向皮肤拉伸和皮肤滑动等外界刺激,实现手指位置、稳定抓取、切向力和运动方向等感觉功能.
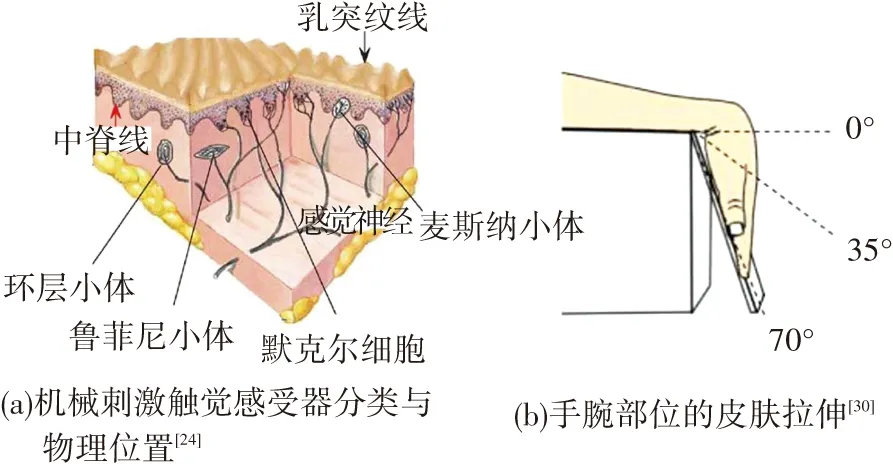
图1 人体皮肤
人类皮肤非常直观可见,人们往往易忽视其复杂性.如皮肤中默克尔细胞、迈斯纳小体、鲁菲尼小体和环层小体等4种触觉感受器的空间分辨率分别为0.5、3.0~4.0、7.0+和10.0+mm,且人体各部位触觉感受器分布密度差异大.比如成年人的指尖和手掌心分别分布了241和58 cm-2触觉感受器,使得人体各部位的空间分辨率差异显著,自指尖、面部和脚趾等到大腿、腹部的空间分辨率由最高下降到最低,比如指尖和腹部的空间分辨率分别接近1 mm和大于30 mm[24].英国曼彻斯特大学Cody等[26]通过心理物理学实验量化发现:手腕背表面的空间分辨率高于手和前臂的其它部位,肢体轴线横向比纵向的空间分辨率更高,这种效应可能来自于一阶触觉感觉单元及其高阶投射神经元的感受场的不对称性;美国约翰霍普金斯大学Bensmaïa等[27]通过1~8 mm的空间分辨率和5~80 Hz的振动频率变化物体的静态和振动光栅试验发现,空间分辨率随着振动触觉的振动频率增加而下降.快速响应方面,人类触觉最高动态检测到700 Hz的振动频率,即响应时间仅约为1.4 ms;美国印第安纳大学Craig和我国杭州大学XU Baihua[28]通过同一手指、同一手上的不同手指和不同手的手指上触觉传感试验发现,人类皮肤指尖上不同位置的两个事件的临界感触响应时间为30~50 ms级.可控的压力灵敏度研究表明:男性手掌和指尖的法向压力阈值平均分别约为0.158 g和0.055 g,女性的相应值分别为0.032 g和0.019 g[29].
人类皮肤自然状态下不仅具有高柔性,英国Cody课题组[30]和美国佐治亚理工学院Bhattacharjee课题组[31]的研究结果显示,作为人体体表最富柔弹性的手腕部位的皮肤能够在手腕弯曲时还能经受最大20.4%的拉伸率,如图1(b)所示,可贴合于三维复杂静/动态表面同时完成触觉感知,卸载后皮肤具有的高弹性使其能够恢复原来的形状.
2 电子皮肤触觉传感器研究进展
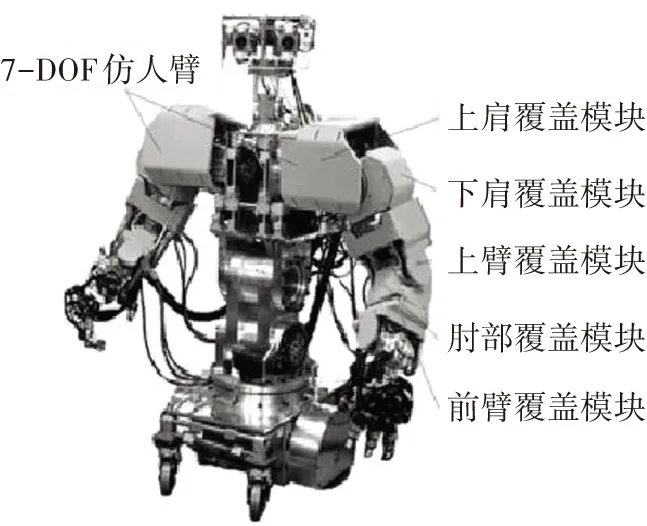
图2 覆盖电子皮肤柔性触觉传感器的WENDY机器人[33]
Fig.2 WENDY robot covered with the electronic skin flexible tactile sensor
相对于听觉、视觉而言,触觉感官的模仿十分困难[32].相较于第1类刚性触觉传感器,电子皮肤更加轻薄柔软,可被加工成各种形状,像衣服一样附着在人体或者机器人等载体的身体表面,以便模仿甚或超越人类皮肤感觉功能[23],实现人体生理状态检测、医疗健康服务与机器人的智能化.早在20世纪70年代,国际上就已开始对电子皮肤触觉传感器的探索与研究,但进展缓慢[24].80年代触觉研究增长迅速,压阻式、电容式、光电式等原理均得到应用,但精度低且对于微小作用力更是束手无策.90年代触觉传感技术研究继续增长并多方向发展.本世纪以来尤其是近几年,电子皮肤触觉传感器柔性化、弹性化、透明化、可扩展性、轻量化和多功能化等方面[4,5,16-19,33-39]取得显著进展,如日本早稻田大学Iwata课题组采用柔性皮肤[33]代替硬质皮肤[11]的触觉传感器厚度为3 mm,肩和臂部空间分辨率为20 mm,分布于WENDY机器人全身,识别人机交互的触觉信息,如图2;Bhattacharjee课题组[31](2013)研发了由弹性针织物制作的电子皮肤触觉传感器,并设计制作了具有25个传感单元的弹性袖套电子皮肤,分别覆盖于仿人机器人的前臂和2自由度腕关节等,验证了其功能;瑞士洛桑联邦理工学院的Gerrat等[39](2014)用有机硅泡沫材料作为介质薄膜,采用双层的5 nm Cr和30 nm Au薄膜蒸镀于PDMS(Ploydimethysiloxane)薄膜的方法制备了弹性电极,第一次将基于电容式的电子皮肤弹性触觉传感器成功应用于iCub仿人机器人手手套的背面上,完成了障碍物检测和表面重建任务[39].
目前,电子皮肤触觉传感器种类繁多,可广泛应用于工业生产与医疗设备中,其中用于接触压力测量的电子皮肤触觉传感器是最具挑战性且应用潜力最大的[4,5,12-19,29-33].大部分早期研制的触觉传感器多为采用硅作为主要材料的微传感器[40],其制造技术主要采用MEMS微机电系统技术实现良好的空间分辨率,形成微小阵列,体积小,成本低.由于硅微型压力传感器难以满足大面积覆盖的电子皮肤触觉传感器需要的柔性化和可扩展性等要求,东京大学Someya课题组[41](2004)基于有机场效应晶体管(OFETs)开发了压力测量的电子皮肤柔性压阻式阵列触觉传感器.除电极之外,此传感器的所有部件都由软性材料制作而成,所以即使包裹于半径2 mm的圆柱之上,仍可保证正常使用.如图3(a),此传感器在保证较低成本并可大面积制作的基础上,实现了柔性化;随后(2005)引入“渔网”结构[42],如图3(b),使得传感器能被拉伸25%同时测量接触压力.虽然依靠“渔网”结构实现的弹性附着在载体或活动关节时将会消失,但该工作明确了主要从材料和结构两方面着手开发电子皮肤触觉传感器的方法.
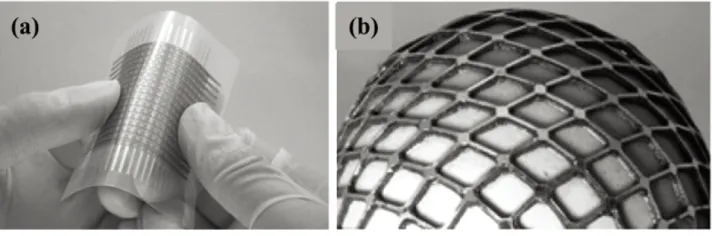
(a) 基于有机场效应管[41] (b) 基于“渔网”结构[42]
2.1 电子皮肤触觉传感器的柔性化与交互式
2.1.1 采用拼接式实现柔性化
采用拼接式是实现电子皮肤阵列触觉传感器柔性化的途径之一.东京大学Ohmura等[43](2006)利用多个包含微小压敏单元的独立模块分散布置于静态三维表面,模块之间通过串行总线连接并可扩展实现复杂曲面压力测量的柔性触觉传感器,如图4,但难以用于动态表面或活动关节,且空间分辨率低.Ohmura等从适形性、顺应性、测量范围和灵敏度、安装空间、覆盖面积、质量、能耗、尺寸、韧性和可制造性方面提出的电子皮肤触觉传感器设计要求已被国内外诸多研究者遵循和采用.
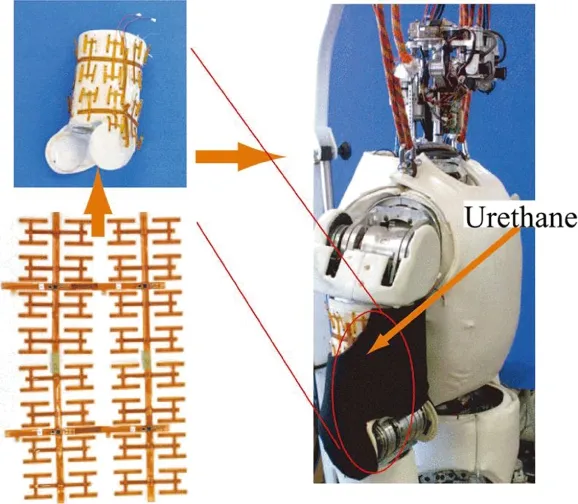
图4 独立传感单元通过串行总线连接形成柔性压力阵列触觉传感器[43]
Fig.4 Independent pressure sensing units to form flexible array tactile sensor via serial bus connection
我国东华大学的吕晓洲等[20,38,44]开发了一种能够实时测量三维界面应力的新型平板电容柔性压力触觉传感器,这种传感器基于PCB(printed circuit board)耦合电极和PDMS制作而成,由体积较小的单个传感器拼接成电子皮肤阵列触觉传感器,可用于检测截肢表面和假肢接口之间的应力分布以及人体足底应力分布,如图5.合肥工业大学的黄英等[45]利用有机硅导电银胶、金属膜和炭黑/硅橡胶复合材料等,采用可拼接的正六边形模块化的阵列结构设计出一种基于串行总线的电容式电子皮肤柔性阵列触觉传感器,兼顾可扩展性,实现可穿戴和大面积触觉感知.
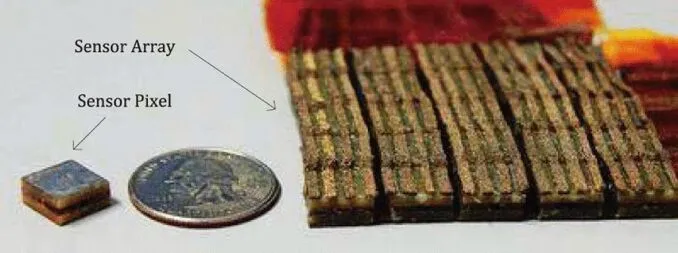
图5 基于平板电容的三维界面应力测量电子皮肤柔性阵列触觉传感器[44]
Fig.5 Three-dimensional interface stress measurement electronic skin flexible array tactile sensor based on plate capacitor
2.1.2 采用新材料和新结构实现柔性化
近年来,人们更多探索采用新材料和新结构实现触觉传感器柔性化.黄英等[13,17,46]基于柔性压力敏感导电橡胶开发了用于三维压力检测的电子皮肤压阻式柔性阵列触觉传感器.针对导电橡胶的体压阻效应和界面压阻效应分别设计了多层网状阵列式结构和单层阵列式结构,并对传感器阵列的信号处理电路和补偿电路进行了深入的研究[47-48].这种柔性触觉传感器在体育训练、康复医疗以及智能机器人等领域有广阔的应用前景.
加州大学伯克利分校Javey课题组的Takei等[49]使用接触印刷法将平行的半导体(Ge/Si)纳米线阵列附着于柔性的聚酰亚胺基底材料,制作了基于场效应晶体管的压力测量电子皮肤柔性触觉传感器,能够检测动态压力且在超过2 000次的弯曲半径为2.5 mm的弯曲试验中保持性能稳定,如图6(a),但难以实现可扩展性且缺乏弹性.西安交通大学张学锋等[50]利用薄层金属银电极、PET基底和压阻橡胶的良好柔性制作了基于压阻原理的电子皮肤柔性压力阵列触觉传感器,分散的圆形传感单元被布置在柔性的PET薄片上,实现了阵列传感器的柔性化.韩国工业技术研究院的Cho 课题组[40]利用导电油墨和硅弹性体合成材料借助成型工艺制作了电子皮肤压阻式柔性阵列力触觉传感器,传感单元尺寸为20 mm×20 mm×5 mm,最小分辨力为0.011 N,制造成本低,但在超薄(通常要求在1.5 mm以内)和轻量化等方面的不足限制了其应用.
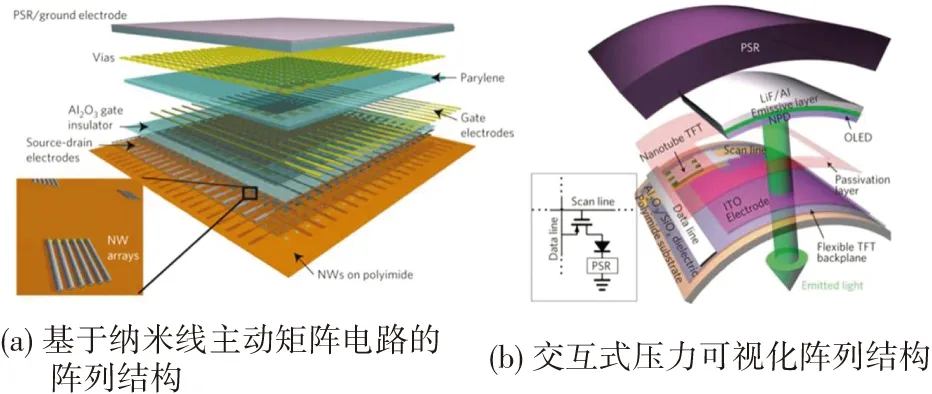
图6 压力测量的电子皮肤柔性触觉传感器[40]
Fig.6 Electronic skin flexible tactile sensor for pressure measurement
2.1.3 采用新材料和新制作技术实现柔性化、交互式
美国加利福尼亚大学Wang等[14](2013)将纳米管制作的薄膜晶体管、压敏橡胶和有机发光二极管阵列集成于聚酰亚胺基底材料,制作了第一款用户交互式电子皮肤柔性触觉传感器.该柔性触觉传感器通过发光二极管的光强瞬时地表示出施加外力的幅度,可广泛应用于交互式输入/控制设备、智能壁纸、机器人和医疗/健康监测设备,如图6(b).新材料结合新制作技术增加了电子皮肤触觉传感器的功能.2.2 电子皮肤触觉传感器的弹性化、透明化与柔弹性化2.2.1 采用新材料和新结构实现弹性化、透明化
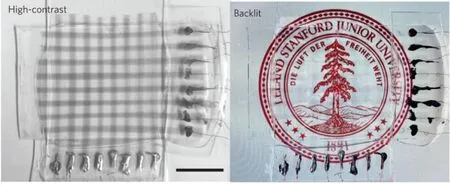
图7 基于PDMS和碳纳米管的压力/应变测量的电子皮肤阵列触觉传感器[12]
Fig.7 Pressure/strain measurement electronic skin array tactile sensor based on PDMS and carbon nanotubes
美国斯坦福大学Zhenan Bao课题组Lipomi等[12](2011)将碳纳米管喷涂于PDMS基底制作了具有良好透明度和弹性的电容式电子皮肤阵列触觉传感器,如图7.PDMS几乎完全透明且具有良好的弹性,拉伸率可达到100%以上.附着或埋于弹性材料中的蜷曲的碳纳米管以及由其形成的网状结构使宏观的导线能够随着弹性材料的拉伸而伸长同时保证导电性,从而实现了整体结构的弹性.此阵列传感器既能检测压力又能检测拉力,但是由于挤压和拉伸都会明显改变电容信号,所以只易于用来单独测量应变或者拉伸率不变的情况下测量压力.存在同样问题的还有Zhenan Bao课题组2012年选择PDMS作为光波导和基底材料,基于有机发光二极管和有机光敏二极管制作了一款光电压力传感器[15].该触觉传感器不但透明度好,易于大面积制作,并且具有良好的循环稳定性和耐弯曲特性.透明度对于用作电子皮肤的触觉传感器很重要,良好的透明化能够保证利用太阳能驱动的机械设备对光能的吸收.
美国伊利诺伊大学厄巴纳-香槟分校Rogers和西北大学Huang联合课题组[5,51]通过结构和形状设计,利用传统无机材料如金属、硅基材料等制成柔、弹性导电元件,采用三维“波”结构使得传统无机导电材料能够随着弹性基底的延展而伸长变形但不会发生断裂等破坏的方法,在2012年制作了一种可以穿带于手指上的压力测量的电子皮肤弹性阵列触觉传感器[51].这种结构在外界压力作用下“波”状导体各处的拉伸率不同,不会产生自然状态下的拉伸形态,也有破坏导体的可能,因而在压力触觉传感器研发应用上受到限制.
英国格拉斯哥大学的Yogeswaran课题组[52]基于CNT-PDMS纳米复合材料制作了压力测量的电阻式电子皮肤柔弹性触觉传感器,该传感器由叉指银的方式构建底部电极,连接由CNT-PDMS复合材料制成的顶部导电聚合物,可实现最小500 Pa的压力值的检测,能广泛应用于机器人、医疗假肢等领域.美国阿克伦大学Vatani等[53](2016)利用离子液体和碳纳米管新型纳米复合材料制作了5层结构的接触压力测量的电子皮肤弹性触觉传感器,中心压阻传感层测量面积为1×1 mm2,中间两层弹性电极板采用的碳纳米管/光致聚合物纳米复合材料的拉伸率可达30%,最外层为封装层,主要适用于小范围测量,可扩展性差.2.2.2 采用新材料、新结构和新加工制作技术实现柔弹性化、透明化
东京大学的Alirezaei等[54](2007)基于电阻抗断层成像技术开发了一款压力测量的电子皮肤触觉传感器,采用导电针织物取代了导线,实现了触觉传感器的柔性化和一定的弹性,可以很好地覆盖于像人脸这样复杂的三维表面以及活动的关节,并且具有超薄且可变形的特点.
北京科技大学曹建国课题组Wang等[55-56]充分利用银纳米线优良的导电性和纳米尺寸效应,提出了一种基于“多孔PDMS”和AgNWs/PDMS纳米复合材料电极的新型多层“三明治”式压力传感器阵列结构(图8),采用了纳米制造、电子束蒸镀、磁控溅射、氧等离子体处理、3D打印、仿生设计和有限元仿真等先进制造技术.首先,制作基于纳米复合材料的柔弹性导电薄膜电极层;其次,利用力敏导电压阻橡胶开发了柔性压阻式压力传感器阵列;然后,采用多孔PDMS及力敏导电压阻橡胶制作柔弹性中间传感层;随后,设计采用新型多层“三明治”式压力传感器阵列结构和金属薄层制作电子皮肤触觉阵列传感器;最后,实现传感器阵列的封装、拼合和裁剪实现其可扩展性.图8中,图8(a)为制备的新型银纳米线复合材料导电薄膜电极层的SEM扫描电镜表面形貌图像,图8(b)为电子皮肤触觉传感器新型多层“三明治”结构示意图,图8(c)为制作完成的电子皮肤触觉阵列传感器及其高柔弹性的展示.这种电子皮肤触觉传感器不仅具有高柔性、高弹性,还能在0~180 kPa大量程范围内实现高精度的测量,可扩展性好,性能稳定,可实现复杂表面或活动关节等的动态测量.为高柔弹性电子皮肤触觉传感器在医疗器械和智能机器人等复杂三维表面上的应用奠定了基础,为高柔弹性电子皮肤实现和机器人等载体智能化提供了新的方法[19,57].
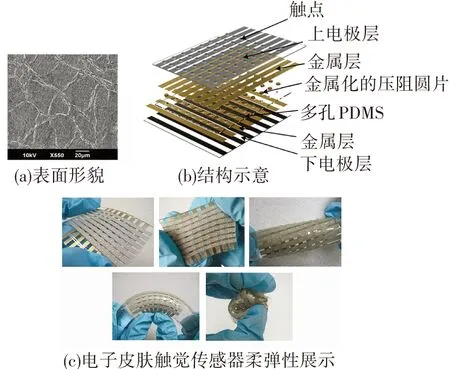
图8 基于纳米材料和新型“三明治”结构的柔弹性电子皮肤触觉传感器及其柔弹性展示[19]
Fig.8 Flexible and stretchable electronic skin tactile sensor and its soft impressions based on nanomaterials and new “sandwich” structure
德国比勒费尔德大学Gereon等[58](2015)利用导电针织物实现了良好柔弹性,将若干触觉传感单元嵌入到单一的传感器膜片,具有很好的扩展性可覆盖于各种形状的物体.
2.3 电子皮肤触觉传感器的传感特性与性能分析
2.3.1 电子皮肤触觉传感器的传感特性
为了模仿甚或超越人类皮肤的触觉感知特性,必须发展高空间分辨率、高灵敏度、快速响应、多功能、制造成本低、可扩展性强、可靠性高及其透明化的电子皮肤新型可穿戴柔弹性仿生触觉传感器.以最具挑战性且应用潜力最大的接触压力测量的英国利兹大学Dogramadzi[59]、日本东京大学Someya[42]、美国加州大学伯克利分校Takei等[49]和北京科技大学曹建国课题组[19,57]的电子皮肤触觉传感器为例,其空间分辨率分别为5.0 mm×60.0 mm、4.0 mm×4.0 mm、4.0 mm×4.0 mm和4.5 mm×6.0 mm,逐步接近人类皮肤;Dogramadzi课题组和Someya课题组未提供可测量动态压力频率,本课题组和Javy课题组传感单元均可>5 Hz,接近人类皮肤低频动态范围;Dogramadzi和Javey课题组分别采用铜电极和整片压阻橡胶制作的电子皮肤触觉传感器具有良好柔性,但缺乏弹性,Someya课题组拉伸率达到了25%,本课题组研发的触觉传感器具有高柔性、高弹性,其拉伸率可达到30%,均达到并超越了人类皮肤最大的拉伸率,这对覆盖机器人、医疗设备等复杂的三维表面和活动的关节部位非常重要.
下面讨论电子皮肤触觉传感器高灵敏度和多功能等性能.
2.3.2 电子皮肤触觉传感器的高灵敏度性能分析
灵敏度S是电子皮肤触觉传感器的重要性能参数,可表示为
(1)
ΔC=C-C0.
(2)
式中:C0为基准压力下的电导值,如电容值或电阻值;p为施加的压力;C为施加压力后的电导值.
以机器人、医疗和军事等领域广受关注的接触压力测量的电子皮肤触觉传感器为例,常见的压力范围为<1 Pa为超低压力区[19,34,39],大致相当于声波压力,可用于助听器、麦克风等;1~1 000 Pa为细微压力区,可用于触摸屏等;1~10 kPa为低压力区,大致相当于人类轻触压力,可用于人机交互、服务机器人等;10~100 kPa为中压力区,大致为手握操作对象的压力范围,可用于健康监测、足底压力分布测量等;>100 kPa的高压力区,可用于结肠镜、医疗假肢和工业机器人等.根据电子皮肤柔/弹性触觉传感器压力范围依序讨论其灵敏度性能.
Zhenan Bao课题组Tee等[60]和Benight等[61]探索利用自愈合的复合材料制作导电性能良好的电子皮肤.2014年,该课题组Pan等[34]从形状及性质上进行改进,利用具有空心球微结构的锯齿状压阻薄片开发了压阻式的电子皮肤压力触觉传感器.最小可检测<1 Pa的压力;在<30 Pa低压力区具有-56.0~133.1 kPa-1的超高灵敏度;在<100 Pa压力区依然具有7.7~41.9 kPa-1的很高灵敏度,其响应时间约为50 ms,可实现微小压力的检测(如图9).
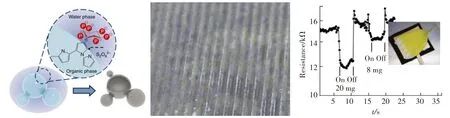
(a) 压阻材料空心球微结构示意 (b)固化成型的锯齿形结构 (c)传感器响应测试
Fig.9 Piezoresistive pressure sensor array based on self-healing conductive piezoresistive composite and hollow sphere microstructure[34]
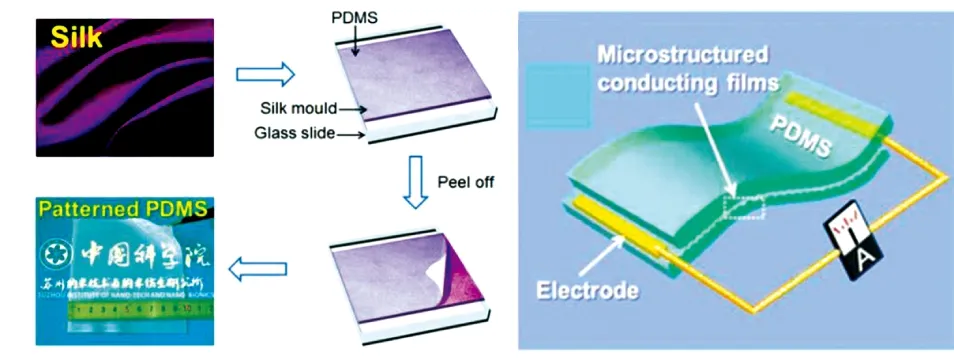
(a) 柔性图案化PDMS膜的 (b)典型的电子皮肤示意制造工艺示意
图10 基于PDMS的电子皮肤电容式高灵敏度触觉传感器[63]
Fig.10 Electronic skin highly sensitive capacitive tactile sensor based on PDMS
哈尔滨工业大学Wang和日本大阪大学Jiu等[62]填充有高浓度银纳米线-聚氨酯的弹性复合材料研发的电子皮肤柔性电容式压力触觉传感器,低压力区达到高灵敏度.在<30 Pa的低压力区为5.54 kPa-1,30~70 Pa低压力区为0.88 kPa-1.中国科学院苏州纳米技术与纳米仿生研究所张珽课题组的Wang等[63],基于单壁碳纳米管和超薄的PDMS薄膜制作了压力测量的电子皮肤柔性电容式阵列触觉传感器,如图10.这种电子皮肤触觉传感器的独特之处在于将制作PDMS的预聚体与交联剂混合物涂于丝绸模具之上,固化后将其剥脱,便在PDMS薄膜表面得到与丝绸织物微观表面反相的纹理.该电子皮肤触觉传感器最小可检测质量为0.01 g,相应最小可检测压力为0.6 Pa,在60~300 Pa小压力区具有高灵敏度为1.80 kPa-1,可监测不同质量小昆虫(如0.01 g蚂蚁和0.04 g蜜蜂)、人的声带振动以及脉搏跳动,稳定性好,可用于监测人体生理信号.中国科学院半导体所沈国震课题组Lou等[64]与中国人民解放军总医院姜凯教授合作研制出一种基于石墨烯材料的电子皮肤柔性触觉传感器,可快速感知微小压力变化,最小可检测压力为1.2 Pa,灵敏度为15.6 kPa-1,响应时间为5 ms,可实现脉搏和声音识别等.
国立首尔大学Joo等[65]基于PDMS嵌入银纳米线制作多尺度结构的弹性电极研发的电容式电子皮肤柔性压力触觉传感器,最小可检测0.04 g质量,相应压力为15 Pa,灵敏度高:在45~500 Pa的低压力区为3.80 kPa-1,0.5~2.5 kPa的中压力区为0.80 kPa-1,2.5 ~4.5 kPa的高压力区为0.35 kPa-1.台湾大学Lai等[66](2016)利用银纳米线作为电极材料在织物上固化形成的PDMS 薄膜制作了柔性电容式电子皮肤压力触觉传感器,最小检测压力为0.6 Pa,<3.0 kPa的小压力区具有超高灵敏度:1.04 × 104~6.57 × 106kPa-1,响应时间为20 ms.
意大利理工学院的Viry课题组[67]基于导电织物电极制作成柔性电极嵌入PDMS之中开发了一种全柔性电容式电子皮肤三轴力触觉传感器,其上层单电极与底层4个电极分别产生电容,通过测量4个电容值的相对变化能够实现对多维力的高灵敏度的探测,最小可检测质量为0.01 g,挑战并超越了人类皮肤轻触时约0.02 g水平.压力在0.5~2.0 kPa(32~130 mN)时,具有0.53 kPa-1的高灵敏度;压力在2.0~4.0 kPa时,具有0.30 kPa-1的高灵敏度;压力在4.0~10.0 kPa,具有0.20 kPa-1的高灵敏度.清华大学Tian等[68](2015)研究的基于激光划线石墨烯的电子皮肤柔性电阻式压力触觉传感器,在宽量程压力范围具有很高灵敏度,在<50 kPa的低压力区灵敏度为0.96 kPa-1,50~113 kPa的高压力区灵敏度为0.005 kPa-1.
韩国先进科技研究所(KAIST)的Park课题组Morteza等[69](2014)基于银纳米线和PDMS弹性体,采用PDMS-银纳米线-PDMS的三明治结构制作了一种可穿戴手套检测手指运动的电子皮肤弹性压阻式应变触觉传感器,可在0°~120°弯曲角度范围具有良好灵敏度,约为0.63 rad-1,并具有弹性好、性能稳定和制作成本低的特点.
2.3.3 电子皮肤触觉传感器的多功能性能
早在2005年,Someya课题组[42]就通过在“渔网”结构的压力传感器阵列中叠加温度传感器阵列,实现了压力和温度同时测量.日本精工株式会社的Ishikawa和Daisuke等[70-71]采用将敏感材料置于两片导电薄膜之间的夹层结构,提出一种利用超薄、柔性、轻量化的测量压力中心的电子皮肤触觉传感器实现滑觉检测的方法.该传感器可安装于机器人多指手上,在1 ms的时间内测量出分布载荷的中心位置和施加于传感器表面的总载荷.黄英[17]等(2011)采用三维力和温度传感器凹凸状交替排布的结构构建柔性多功能触觉传感器阵列,可应用于智能机器人电子皮肤对三维力和温度的检测.韩国蔚山国家科学技术研究所的Park等[72-73](2014)受启发于人类皮肤的表皮层与真皮层的互锁结构,基于碳纳米管和PDMS形成互相连锁的小型拱形结构,制作了可以感知压力方向的电子皮肤触觉传感器,如图11.这种电子皮肤触觉传感器灵敏度高,可感知较小的压力,甚至可以感知空气流的方向、位置及强烈程度.
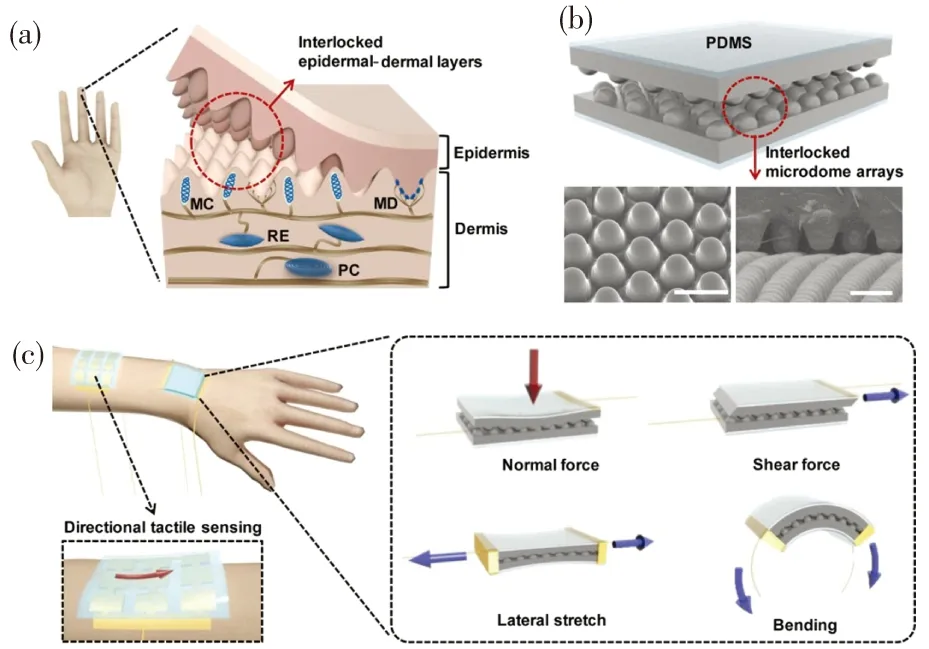
(a)人类皮肤的表层与真皮层的互锁结构(b)基于碳纳米管和PDMS形成互锁的小型拱形结构(c)可以感知的压力方向
图11 可感知压力方向的电子皮肤触觉传感器[72-73]
Fig.11 Electronic skin tactile sensor with a function of pressure direction sensing
3 电子皮肤触觉传感器研发存在的主要难题
电子皮肤触觉传感技术经过近年来的快速发展,已经取得了一系列的成果,尤其是以机器人科技为代表的智能产业蓬勃兴起,在制造业、医疗、国防安全和服务等领域为其显示出了广阔的应用前景[1-9,39],如日本福岛核电站在大地震后,部分辐射严重的地区不适于人类工作,日本政府已委托本田公司着力为他们已有的ASIMO机器人研制电子皮肤触觉传感器,以使其能够更好地感知周围环境,工作于大地震后福岛核电站部分辐射严重的区域;随着机器人参与的智能制造模式的发展,新一代机器人不再被固定在安全工作地点,灵活机器人与人类可以在智能工厂一起协同工作.通过感知智能和多传感器融合提高机器人的环境适应性,有利于机器人与人类建立起一种新型的人机共融模式[74-79],但其研究和开发依然存在诸多难题,现总结如下.
3.1 电子皮肤阵列触觉传感器兼顾高柔性和高弹性难题
人们期待新型的电子元件能够弯曲、延展、挤压、扭转或变形成复杂的曲面形状.电子皮肤阵列触觉传感器作为柔弹性电子元件的一种,为了模拟人类皮肤能够覆盖于机器人等载体复杂的三维表面和活动关节,必须具有很高的柔弹性[4-9].来自意大利技术研究所的研究结果表明,要想实现人类手腕部位的拉伸,仿生皮肤的弹性范围应该在30%左右.因此,优化仿生皮肤触觉传感器,实现其在大拉伸率状态下正常工作是研究的重点与难点之一.
阵列触觉传感器柔性化方面进展显著,研究人员主要从3个方面解决触觉传感器柔弹性的问题.首先,材料的选择对柔弹性的实现至关重要,PDMS由于其在化学惰性、温度稳定性、透明度等方面的优势,常被选作基底材料,而研究人员青睐的活性材料主要有碳纳米管(CNT)、石墨烯、纳米线、有机聚合物等; 其次,各课题组设计了不同的结构以实现柔弹性,如多层网状阵列式结构和单层阵列式结构,基于“多孔PDMS”设计了新型多层“三明治”结构和空心球微结构等; 再次,近些年聚合物微机械加工工艺等新型制作方法和3D打印技术逐步兴起,在部分领域颠覆了传统的设计和制造方式,为电子皮肤触觉传感器的柔弹性的实现创造了新的可能:哈佛大学的Muth等[80](2014)利用3D打印技术,将特殊导电材料注入高分子弹性材料中,制作了拉伸率达到400%的应变式触觉传感器.早稻田大学Pu 等[81](2014)利用二氧化钼特有的大带隙、高有效载流子迁移率及高机械强度的特点,并结合化学汽相沉积法制作了柔弹性薄膜晶体管,可用于制作电子皮肤触觉传感器与可穿戴计算机等柔弹性要求较高的电子元器件.Zucca等[82](2015)基于卷对卷加工技术开发了具有超顺应性的导电聚合物纳米薄膜.该纳米薄膜先从临时基底剥落,然后可以覆盖于任意形状的物体表面.这种可以自由站立且超薄的导电薄膜具有不易察觉、成本低的特点,非常适合用于制作电子皮肤触觉传感器的电极,并可应用于运动、健康及医疗保健领域.但是,能够贴合于复杂的三维静/动态表面,并能准确完成测量任务的电子皮肤触觉传感器目前还非常少.
3.2 大面积电子皮肤触觉传感器可扩展性难题
人类皮肤是人体面积最大的器官,一个成年人的皮肤展开面积约2 m2,质量约为人体质量的1/20,厚度因人或部位而异,为0.5(如眼皮皮肤)~4 mm(如足底部皮肤).为了模拟人类皮肤,电子皮肤触觉传感器需要能够任意剪裁和拼接同时保证正常工作,就必须具备良好的可扩展性[4,19,45,58].目前,经过各国研究人员的不断努力,单个传感单元的灵敏度、线性度、柔弹性等性能已经得到很大提升,但仿生机器人的表面积通常比较大,电子皮肤触觉传感器甚或传感服装通常都需要设计成阵列传感器的形式才能完成检测任务.单片面积为55 mm×50 mm~70 mm×70 mm扩展为大面积电子皮肤不仅要拼合电子皮肤触觉传感器的电极层、触点位置的布置,并根据实际形状对电子皮肤进行合理剪裁,还要求后续的信号处理电路相对简单、易于阵列化,并优化电极布线方式,解决传感器阵列相邻传感单元间的信号串扰问题.此外,仿生机器人连接部位的形状复杂,这对触觉传感器可扩展性提出了更高的要求.
3.3 高灵敏度电子皮肤触觉传感器制造成本高
高灵敏度电子皮肤触觉传感器的制作通常涉及聚合物微加工、氧等离子体处理、电子束蒸镀、磁控溅射等复杂的工艺和技术,相应的设备价格高昂; 另外制作电子皮肤触觉传感器的材料普遍比较昂贵,因而成本较高,还要考虑制作触觉传感器的时间成本,这也会大大增加触觉传感器的制作成本,从而限制了电子皮肤触觉传感器的大批量生产.最近,美国阿克伦大学Vatani等[83](2015)采用聚合物/纳米复合材料开发的压阻式的电子皮肤多层柔性触觉传感器,利用DP(Direct-Print)直接打印技术和层层软成型工艺等混合制造工艺,为电子皮肤触觉传感器开发提供了富有前途的工具.随着化学、材料科学和先进制造技术的进步,通过选取常见的和易于得到的材料,利用比较成熟的制作工艺和新颖先进制造技术,简化传感器阵列的结构等方法以降低电子皮肤的制造成本,使其大批量生产成为可能.
4 电子皮肤触觉传感器发展趋势
近年来,得益于新材料和新工艺的出现[4,5,84],电子皮肤触觉传感器发展迅速,其性能在多方面已能模仿甚或超越人类皮肤,其研究成果已逐渐应用于生产生活、康复医疗等多领域.未来,电子皮肤触觉传感器应结合多学科知识向高柔弹性、高灵敏度、多功能、自愈合和自供电等方向发展,达到与人类皮肤更加近似的综合感知触觉性能,以适应复杂的外部环境[1-4,74-86].
4.1 高柔弹性、宽量程的高灵敏度与多功能
目前,电子皮肤触觉传感器通过采用新型柔性材料、多种传感器阵列结构、新型制作工艺实现了柔性化,利用空心球微结构的锯齿状压阻薄片或采用石墨烯、单壁碳纳米管等材料可实现在较小量程压力范围内的高灵敏度,而兼具高柔弹性、宽量程的高灵敏度与多功能的电子皮肤可以更好地模仿人类皮肤,同时实现多维压力[46,87-88]、温度、湿度、表面粗糙度[89]等多种参数的实时检测[90].但现有的触觉传感器阵列大部分功能单一,主要集中在压力测量[19],只有少数具有可同时检测拉力或温度等参数的功能.因此,开发兼具高柔弹性、宽量程的高灵敏度与多功能的电子皮肤,使其更加接近甚至超越人类皮肤的性能是今后课题研究的重要努力方向,而触觉传感器都要求精简布线方式,那么如何从采集到的数据中区分不同的激励信号,是实现触觉传感器多功能的关键之一.
4.2 自愈合与自清洁
人类的皮肤具有自我修复机械损伤的能力,同样具有自愈合能力的电子皮肤触觉传感器在仿生机器人、医疗保健及其他领域具有很高的实用价值,通过自体修复,可以延长触觉传感器的使用寿命,这一功能主要通过将自愈合的特性引入弹性材料来实现[34,61].尽管目前已经有研究人员实现了电子皮肤触觉传感器的自愈合,但是其稳定性和灵敏度都有待提高.此外,电子皮肤触觉传感器的自清洁功能也具有重要的意义,在机器人、医疗设备等领域具有广阔的应用前景,但具有自清洁功能的电子皮肤触觉传感器目前还鲜有报道.
4.3 自供电与透明化
为电子皮肤触觉传感器提供便携、可移动、并经久耐用的电源是一个难点,目前,已经发现太阳能电池、超级电容器、机械能量收割机、无线天线等很多先进的技术可以实现发电,并能将电能传输或储存在弹性系统之中.未来,如何将这些技术应用于电子皮肤触觉传感器,实现能量自供给是一个巨大的挑战.采用高透明度的PDMS等材料可实现电子皮肤触觉传感器的透明化,进而保证利用太阳能驱动的机械设备对光能的吸收,因此,透明化设计也是电子皮肤触觉传感器今后发展的重要趋势.
电子皮肤触觉传感器还会不断面临新的挑战,如生物适应性、生物降解能力、神经接口控制、高度集成化、微型化等方面也会成为未来的研究热点.研制出性能优越,易于制作,成本低并能大批量生产的电子皮肤触觉传感器,使之有望走入人类生产生活各个领域,真正为人类服务,是今后的发展方向.
5 结 论
电子皮肤触觉传感器可应用于机器人、医疗健康、军事、智能制造、汽车安全和日常生活等领域,具有广泛应用前景.电子皮肤触觉传感器研究不仅要模拟人类皮肤的压力、温度、湿度、表面粗糙度等综合感知的多功能,还应具有高柔性、高弹性、高灵敏度、高分辨率、透明化和轻量化等多方面的特性.近年来,各种传感原理均已应用电子皮肤触觉传感器研究,并得益于新的敏感材料、新的传感器结构和微结构以及纳米制造、3D打印等先进技术的出现,电子皮肤触觉传感器在柔弹性化、透明化、高灵敏度以及多功能等方面已取得了突破性的研究进展,接近甚或超越了人类皮肤的部分特性.
电子皮肤触觉传感器的研究绝大部分还处在实验室阶段,并未真正投入应用服务人类社会.现有电子皮肤柔性触觉传感器的功能特性与人类皮肤的综合感知依然存在很大差距,电子皮肤阵列触觉传感器还存在着难以兼顾高柔性和高弹性,大面积电子皮肤触觉传感器可扩展性差、不易剪裁和拼接,高灵敏度电子皮肤触觉传感器制造工艺复杂,成本高,难以大批量生产等问题,这都大大限制了电子皮肤的发展.
接触压力测量电子皮肤触觉传感器系统是最具挑战性且应用潜力最大的领域,需要优先发展完善与应用,而多功能电子皮肤阵列触觉传感器可同时实现温度、湿度、灵敏度、表面粗糙度等多种参数的实时检测,需重点关注.未来,电子皮肤触觉传感器最重要的研究方向体现在兼具高柔弹性、宽量程的高灵敏度与多功能、自愈合与自清洁以及自供电与透明化.
[1] 王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51(13):27-44.DOI:10.3901/JME.2015.13.027.
WANG Guobiao, CHEN Diansheng, CHEN Kewei, et al.The current research status and development strategy on biomimetic robot[J].Journal of Mechanical Engineering, 2015,51(13):27-44.DOI:10.3901/JME.2015.13.027.
[2] 吴伟国.面向作业与人工智能的仿人机器人研究进展[J].哈尔滨工业大学学报,2015,47(7):1-19.DOI:10.11918 /j.issn.0367-6234.2015.07.001.
WU Weiguo.Research progress of humanoid robots for mobile operation and artificial intelligence[J].Journal of Harbin institute of technology,2015,47(7):1-19.DOI:10.11918 /j.issn.0367-6234.2015.07.001.
[3] 蔡鹤皋.对我国机器人产业发展的思考[J].集成技术,2015,4(5):1-4.
CAI Hegao.Reflections on the development of robot industry in china[J].Journal of integration technology,2015,4(5):1-4.
[4] MALLORY L, HAMMOCK A C,BENJAMIN C, et al.25th anniversary article: the evolution of electronic skin (E-Skin): A brief history, design considerations, and recent progress[J].Advanced Materials, 2013,25(42):5997-6038.DOI:10.1002/adma.201302240.
[5] ROGERS J A,SOMEYA T,HUANG Y G.Materials and mechanics for stretchable electronics[J].Science, 2010,327(26):1603-1607.DOI:10.1126/science.1182383.
[6] XU Sheng,ZHANG Yihui,CHO Jiong,et al.Stretchable batteries with self-similar serpentine interconnects and integrated wireless recharging systems[J].Nature Communications,2013,1543(2013-02-26)[2016-01-07].http://www.nature.com/articles/ncomms2553.DOI: 10.1038/ncomms2553.
[7] XU Sheng,ZHANG Yihui,JIA Lin, et al.Soft microfluidic assemblies of sensors, circuits, and radios for the skin[J].Science, 2014, 344(6179):70-74.DOI: 10.1126/science.1250169.
[8] ARGALL B D, BILLARD A G.A survey of tactile human-robot interactions[J].Robotics and Autonomous Systems,2010,58(10): 1159-1176.DOI:10.1016/j.robot.2010.07.002.
[9] FRIGOLA M,CASALS A,AMAT J.Human-robot interaction based on a sensitive bumper skin[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing: IEEE,2006:283-287.
[10]蔡鹤皋,王志孝,曲原.弧焊机器人触觉智能的研究[J].哈尔滨工业大学学报,1985,17(增):63-70.
CAI Hegao, WANG Zhixiao, QU Yuan.On the research for tactile sensing intelligence of arc-welding robots[J].Journal of Harbin institute of technology,1985,17(S):63-70.
[11]IWATA H, HOSHINO H,MORITA T,et al.Human-humanoid physical interaction realizing force following and task fulfillment[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Takamatsu: IEEE,2000:522-527.
[12]LIPOMI D J, VOSGUERITCHIAN M, TEE B C K,et al.Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes[J].Nature Nanotechnology,2011,6(12):788-792.DOI: 10.1038/NNANO.2011.184.
[13]黄英,葛运建.可连续检测三维力的人工皮肤简介[J].机器人技术与应用,2011(2):27-28.
HUANG Ying, GE Yunjian.Introduction of artificial skin with the function of continuous detection of three-dimensional force[J].Robot Technique and Application,2011(2):27-28.
[14]WANG Chuan,HWANG D,YU Zhibin,et al.User-interactive electronic skin for instantaneous pressure visualization[J].Nature Materials,2013,12(10):899-904.DOI: 10.1038/NMAT3711.
[15]RAMUZ M, TEE B C K, TOK J B H, et al.Transparent, optical, pressure-sensitive artificial skin for large-area stretchable electronics[J].Advanced Materials, 2012, 24(24):3223-3227.DOI: 10.1002/adma.201200523.
[16]丁俊香,葛运建,徐菲,等.基于导电橡胶的一种新型类皮肤触觉传感器阵列[J].传感技术学报,2010,23(3):315-321.
DING Junxiang, GE Yunjian, XU Fei,et al.Study of a new type skin liked arrayed tactile sensor based on conductive rubber[J].Chinese journal of sensors and actuators,2010,23(3):315-321.
[17]黄英,陆伟,赵小文,等.用于机器人皮肤的柔性多功能触觉传感器设计与实验[J].机器人,2011,33(3):347-353,359.DOI: 10.3724/SP.J.1218.2011.00347.
HUANG Ying,LU Wei,ZHAO Xiaowen, et al.Design and experiment of flexible multi-functional tactile sensors for robot skin[J].Robot,2011,33(3):347-353,359.DOI: 10.3724/SP.J.1218.2011.00347.
[18]张超然,刘婉姬,王立石,等.电子皮肤专利分析[J].中国发明与专利,2016(3):26-32.
ZHANG Chaoran, LIU Wanji, WANG Lishi, et al.Electronic skin patent analysis[J].China invention & patent, 2016(3):26-32.
[19]汪浩鹏.用于接触压力测量的新型高柔弹性电子皮肤研究[D].北京:北京科技大学,2015.
WANG Haopeng.Development of a skin-like pressure sensor array for e-skin application[D].Beijing:University of Science and Technology Beijing, 2015.
[20]吕晓洲,卢文科.用于电子皮肤的界面应力传感器的研究[J].电子学报,2013,41(2):340-345.DOI:10.3969/ j.issn.0372-2112.2013.02.021.
LÜ Xiaozhou, LU Wenke.Interfacial stress sensor for artificial skin application[J].Acta Electronica Sinica, 2013,41(2):340-345.DOI:10.3969/ j.issn.0372-2112.2013.02.021.
[21]石金进,吴海彬,马志举.一种新型机器人仿生皮肤的设计[J].机器人,2013,35(1):32-38.DOI:10.3724/SP.J.1218.2013.00032.
SHI Jinjin, WU Haibin, MA Zhiju.Design of a new robot skin[J].Robot, 2013, 35(1):32-38.DOI:10.3724/SP.J.1218.2013.00032.
[22]胡闻珊,黄英,王敏.机器人敏感皮肤的研究进展[J].合肥工业大学学报(自然科学版),2006,29(12):1624-1626.
HU Wenshan, HUANG Ying, WANG Min.Progress in the research on robot’s sensitive skin[J].Journal of Hefei University of Technology, 2006, 29(12):1624-1626.
[23]篠田 裕之.器用な手の皮膚と触覚[J].日本ロボット学会誌, 2000,18(6):767-771.
[24]DAHIYA R S, METTA G, VALLE M, et al.Tactile sensing-from humans to humanoids [J].IEEE Transactions on Robotics,2010,26(1):1-20.DOI:10.1109/TRO.2009.2033627.
[25]GIRAO P S, RAMOS P M P, POSTOLACHE O, et al.Tactile sensors for robotic applications[J].Measurement,2013,46(3):1257-1271.DOI:10.1016/j.measurement.2012.11.015.
[26]CODY F W J, GARSIDE R A D, LLOYD D,et al.Tactile spatial acuity varies with site and axis in the human upper limb[J].Neuroscience Letters, 2008, 433(2):103-108.DOI:10.1016/j.neulet.2007.12.054.
[27]BENSMAIA S J, CRAIG J C, JOHANSON K O.Temporal factors in tactile spatial acuity: evidence for RA interference in fine spatial processing[J].Journal of Neurophsiology, 2006, 95(3):1783-1791.DOI:10.1152/jn.00878.2005.
[28]CRAIG J C, XU Baihua.Temporal order and tactile patterns[J].Perception & Psychophysics, 1990,47(1):22-34.DOI: 10.3758/BF03208161.
[29]JONES L A,LEDERMAN S J.“Tactile sensing” in human hand function[M].Cambridge: Oxford University Press, 2006:44-74.
[30]CODY F W J, IDREESA R, SPILIOTI D X,et al.Tactile spatial acuity is reduced by skin stretch at the human wrist[J].Neuroscience Letters,2010, 484(1):71-75.DOI:10.1016/j.neulet.2010.08.022.
[31]BHATTACHARJEE T, JAIN A, VAISH S, et al.Tactile sensing over articulated joints with stretchable sensors[C]//World Haptics Conference (WHC).Daejeon:IEEE,2013:103-108.
[32]HARMON L D.Automated tactile sensing[J].The International Journal of Robotics Research,1982,1(2):3-32.DOI:10.1177/027836498200100201.
[33]IWATA H, SUGANO S.Human-robot-contact-state identification based on tactile recognition[J].IEEE Transactions on Industrial Electronics,2005,52 (6):1468-1477.DOI:10.1109/TIE.2005.858739.
[34]PAN L J, CHORTOS A, YU G H, et al.An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film[J].Nature Communications,2014,5:1-8.DOI:10.1038/ncomms4002.
[35]LEE M H,NICHOLLS H R.Review article tactile sensing for mechatronics-a state of the art survey[J].Mechatronics,1999,9(1):1-31.DOI:10.1016/S0957-4158(98)00045-2.
[36]刘少强,黄惟一,王爱民,等.机器人触觉传感技术研发的历史现状与趋势[J].机器人,2002,24(4): 362-366.
LIU Shaoqiang, HUANG Weiyi, WANG Aimin, et al.Overview and prospect of research and development on robot tactile sensory technology[J].Robot, 2002, 24(4): 363-366.
[37]黄英.基于压力敏感导电橡胶的柔性多维阵列触觉传感器研究[D].合肥:合肥工业大学,2008.
HUANG Ying.Research on flexible multi-dimensional array tactile sensor based on pressure sensitive conduetive rubber[D].Hefei:Hefei University of Technology, 2008.
[38]吕晓洲.用于电子皮肤的新型压力传感器的研究[D].上海:东华大学,2012.
LÜ Xiaozhou.Interfacial stress sensors for artificial skin application[D].Shanghai:Donghua University, 2012.
[39]GERRAT A P, SOMMER N, LACOUR S P, et al.Stretchable capacitive tactile skin on humanoid robot fingers-first experiments and results[C]//14th IEEE-RAS International Conference on Humanoid Robots.Madrid:IEEE,2014:238-245.
[40]CHO C, RYUH Y.Fabrication of flexible tactile force sensor using conductive ink and silicon elastomer[J].Sensors and Actuators A:Physical, 2016,237(1):72-80.DOI:10.1016/j.sna.2015.10.051.
[41]SOMEYA T, SEKITANI T, IBA S, et al.A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications[J].Proceedings of the National Academy of Sciences of the United States of America,2004,101(27):9966-9970.DOI:10.1073/pnas.0401918101.
[42]SOMEYA T, KATO Y, SEKITANI T, et al.Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor active matrixes[J].Proceedings of the National Academy of Sciences of the United States of America,2005, 102(35):12321-12325.DOI:10.1073/pnas.0502392102.
[43]OHMURA Y, KUNIYOSHI Y, NAGAKUBO A.Conformable and scalable tactile sensor skin for curved surfaces[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation.Orlando: IEEE Press,2006:1348-1353.
[44]LÜ X Z, KISHORE S R, ALEXANDER V M.Transfer function of interfacial stress sensor for artificial skin applications[J].IEEE Transactions on Electron Devices, 2013,60(8):2640-2647.DOI:10.1109/TED.2013.2270559.
[45]黄英,郭小辉,刘家俊,等.可拼接式全柔性电容触觉阵列传感器设计与实验[J].机器人,2015,37(2):136-141,151.DOI:10.13973/j.cnki.robot.2015.0136.
HUANG Ying, GUO Xiaohui, LIU Jiajun, et al.Expandable fully compliant capacitive tactile sensing array: design and experiment[J].Robot, 2015,37(2):136-141,151.DOI:10.13973/j.cnki.robot.2015.0136.
[46]黄英, 明小慧, 向蓓,等.一种新型机器人三维力柔性触觉传感器的设计[J].传感技术学报,2008,21(10):1696-1699.
HUANG Ying, MING Xiaohui, Xiang Bei, et al.A new design of flexible three-dimension force tactile sensor of robot[J].Chinese Journal of Sensors and Actuators, 2008, 21(10):1696-1699.
[47]董万成,黄英,明小慧,等.一种新型柔性触觉阵列传感器信号处理电路设计[J].传感器与微系统,2009,28(9):75-78.
DONG Wancheng, HUANG Ying, MING Xiaohui, et al.Design of signal processing circuit for new flexible tactile array sensor[J].Transducer and Microsystem Technologies, 2009,28(9):75-78.
[48]董万成.柔性触觉阵列传感器的信号处理及其补偿[D].合肥:合肥工业大学,2010.
DONG Wancheng.Flexible tactile sensor array signal processing and compensation[D].Hefei:Hefei University of Teehnology, 2010.
[49]TAKEI K,TAKAHASHI T,HO J C,et al.Nanowire active-matrix circuitry for low-voltage macroscale artificial skin[J].Nature Materials,2010,9(10):821-826.DOI:10.1038/NMAT2835.
[50]ZHANG X F,ZHAO Y L,ZHANG X L.Design and fabrication of a thin and soft tactile force sensor array based on conductive rubber[J].Sensor Review,2012,32(4):273-279.DOI 10.1108/02602281211257506.
[51]YING M, BONIFAS A P, LU N S, et al.Silicon nanomembranes for fingertip electronics[J].Nanotechnology,2012,23(34):1-7.DOI:10.1088/0957-4484/23/34/344004.
[52]YOGESWARAN N,TINKU S, KHAN S,et al.Stretchable resistive pressure sensor based on CNT-PDMS nanocomposites[C]//11th Conference on Ph.D.Research in Microelectronics and Electronics (PRIME).Glasgow:IEEE,2015:326-329.
[53]VATANI M, MOHAMAD V, CHOI J W.Multi-layer stretchable pressure sensors using ionic liquids and carbon nanotubes[J].Applied Physics Letters,2016,108(6):061908.1-5.
[54]ALIREZAEI H, NAGAKUBO A, KUNIYOSHI Y.A highly stretchable tactile distribution sensor for smooth surfaced humanoids[C]//7th IEEE-RAS International Conference on Humanoid Robots.Pittsburgh:IEEE Press,2007:167-173.
[55]WANG H P,ZHOU D B,CAO J G.Development of a stretchable conductor array with embedded metal nanowires[J].IEEE Transactions on Nanotechnology,2013,12(4):561-565.DOI:10.1109/TNANO.2013.2258172.
[56]WANG H P, ZHOU D B, CAO J G.Development of a skin-like tactile sensor array for curved surface[J].IEEE Sensors Journal, 2014,14(1):55-61.DOI:10.1109/JSEN.2013.2279394.
[57]孟军辉.基于银纳米线的弹性电极研究[D].北京:北京科技大学,2016.
MENG Junhui.Stretchable conductor based on silver nanowires[D].Beijing:University of Science and Technology Beijing,2016.
[58]GEREON H B, RISTO K, CARSTEN S,et al.Flexible and stretchable fabric-based tactile sensor[J].Robotics and Autonomous Systems,2015,63(P3):244-252.DOI:10.1016/j.robot.2014.09.007.
[59]DOGRAMADZI S, VIRK G, BELL G, et al.Recording forces exerted on the bowel wall during colonoscopy: in vitro evaluation[J].The International Journal of Medical Robotics and Computer Assisted Surgery, 2005,1(4):89-97.DOI: 10.1002/rcs.61.
[60]TEE B C, WANG C, ALLEN R,et al.An electrically and mechanically self-healing composite with pressure-and flexion-sensitive properties for electronic skin applications[J].Nature nanotechnology, 2012,7(12):825-832.DOI:10.1038/NNANO.2012.192.
[61]BENIGHT S J, WANG C, TOK J B, et al.Stretchable and self-healing polymers and devices for electronic skin[J].Progress in Polymer Science,2013,38(12):1961-1977.DOI:10.1016/j.progpolymsci.2013.08.001.
[62]WANG J, JIU J T, NOGI M,et al.A highly sensitive and flexible pressure sensor with electrodes and elastomeric interlayer containing silver nanowires[J].Nanoscale,2015,7(7):2926-2932.DOI: 10.1039/c4nr06494a.
[63]WANG X W, GU Y, XIONG Z P, et al.Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals[J].Advanced Materials, 2014,26(9):1336-1342.DOI: 10.1002/adma.201304248.
[64]LOU Z, CHEN S,WANG L L, et al.An ultra-sensitive and rapid response speed graphene pressure sensors for electronic skin and health monitoring[J].Nano Energy, 2016, 23:7-14.DOI:10.1016/j.nanoen.2016.02.053.
[65]JOO Y, BYUN J, SEONG N,et al.Silver nanowire-embedded PDMS with a multiscale structure for a highly sensitive and robust flexible pressure sensor[J].Nanoscale,2015,7(14):6208-6215.DOI: 10.1039/c5nr00313j.
[66]LAI Y C, YE B W, LU C F, et al.Extraordinarily sensitive and low-voltage operational cloth-based electronic skin for wearable sensing and multifunctional integration uses:a tactile-induced insulating-to-conducting transition[J].Advanced Functional Materials,2016,26(8):1286-1295.DOI:10.1002/adfm.201503606.
[67]VIRY L, LEVI A, TOTARO M, et al.Flexible three-axial force sensor for soft and highly sensitive artificial touch[J].Advanced Materials,2014,26(17):2659-2664.DOI: 10.1002/adma.201305064.
[68]TIAN H,SHU Y,WANG X F,et al.A graphene-based resistive pressure sensor with record-high sensitivity in a wide pressure range[J].Scientific Reports,2015,8603.(2015-02-27)[2016-01-07].http://www.nature.com/articles/srep08603.DOI: 10.1038/srep08603.
[69]MORTEZA A, AEKACHAN P, SANGJUN L, et al.Highly stretchable and sensitive strain sensor based on silver nanowire elastomer nanocomposite[J].ACS Nano, 2014,8(5):5154-5163.DOI:10.1021/nn501204t.
[70]ISHIKAWA M, SHIMOJO M.A method for measuring the center position of a two dimensional distributed load using pressure conductive rubber[J].The Society of Instrument and Control Engineers, 1982, 18(7):730-735.DOI: 10.9746/sicetr1965.18.730.
[71]DAISUKE G, YOSHITOMO M, SEIICHI T,et al.Grasping force control of multi-fingered robot hand based on slip detection using tactile sensor[C]//SICE Annual Conference.Tokyo:IEEE,2008:894-899.
[72]PARK J, LEE Y, HONG J, et al.Tactile-direction-sensitive and stretchable electronicskins based on Human-Skin-Inspired interlocked microstructures[J].ACS Nano, 2014,8(12):12020-12029.DOI:10.1021/nn505953t.
[73]PARK J, LEE Y, HONG J,et al.Giant tunneling piezoresistance of composite elastomers with interlocked microdome arrays for ultrasensitive and multimodal electronic skins[J].ACS Nano, 2014,8(5):4689-4697.DOI:10.1021/nn500441k.
[74]赵杰.我国工业机器人发展现状与面临的挑战[J].航空制造技术,2012(12):26-29.
ZHAO Jie.Development and challenge of chinese industrial robot[J].Aeronautical Manufacturing Technology,2012(12):26-29.
[75]曲道奎.中国机器人产业发展的机遇与挑战[J].科协论坛,2015,30(12):15-17.
QU Daokui.Opportunities and challenges of China's robot industry[J].Science & Technology Association Forum,2015,30(12):15-17.
[76]王田苗,陈殿生,陶永,等.改变世界的智能机器:智能机器人发展思考[J].科技导报,2015,33(21):16-22.
WANG Tianmiao, CHEN Diansheng, TAO Yong, et al.Intelligent machines that will change the world: Thinking on the development of intelligent robots[J].Science & Technology Review,2015,33(21):16-22.
[77]乔红, 尹沛劼, 李睿, 等.机器人与神经科学交叉的意义:关于智能机器人未来发展的思考[J].中国科学院院刊,2015,30(6):762-771.DOI:10.16418/j.issn.1000-3045.2015.06.007.
QIAO Hong, YIN Peijie, LI Rui,et al.What is the meaning for the interdisciplinary research of robot and neuroscience: thoughts on the future development of intelligent robot[J].Bulletin of Chinese Academy of Sciences,2015,30(6):762-771.DOI:10.16418/j.issn.1000-3045.2015.06.007.
[78]刘辛军,于靖军,王国彪,等.机器人研究进展与科学挑战[J].中国科学基金,2016(5):425-431.
LIU Xinjun, YU Jingjun, Wang Guobiao, et al.Research trend and scientific challenge of robotics[J].Bulletin of National Nature Science Foundation of China, 2016(5):425-431.
[79]ZHAO J D, JIANG L, CAI H G, et al.A five-fingered underactuated prosthetic hand:hardware and its control scheme[J].Journal of Harbin Institute of Technology,2008,15(2):228-234.
[80]MUTH J T, VOGT D M, TRUBY R L, et al.Embedded 3D printing of strain sensors within highly stretchable elastomers[J].Advanced Materials, 2014, 26(36):6307-6312.DOI:10.1002/adma.201400334.
[81]PU J, LI L J, TAKENOBU T.Flexible and stretchable thin-film transistors based on molybdenum disulphide[J].Physical Chemistry Chemical Physics,2014,16(29):14973-15718.DOI: 10.1039/c3cp55270e.
[82]ZUCCA A, YAMAGISHI K,FUJIE T, et al.Roll to roll processing of ultraconformable conducting polymer nanosheets[J].Journal of Materials Chemistry C,2015,3(25):6539-6548.DOI: 10.1039/C5TC00750J.
[83]VATANI M, ENGEBERG E D,CHOI J W.Conformal direct-print of piezoresistive polymer/nanocomposites forcompliant multi-layer tactile sensors [J].Additive Manufacturing, 2015,7(7):73-82.DOI:10.1016/j.addma.2014.12.009.
[84]XU Feng, ZHU Yong.Highly conductive and stretchable silver nanowire conductors[J].Advanced Materials, 2012,24(37):5117-5122.DOI:10.1002/adma.201201886.
[85]曹建国,廖然,杨利花.燃料电池电动汽车发展现状与前景[J].新材料产业,2015(4):58-63.
CAO Jianguo, LIAO Ran, YANG Lihua.Development situation and prospect of fuel cell electric vehicles[J].Advanced Materials Industry, 2015(4): 58-63.
[86]曹建国,唐慧,杨光辉,等.有高温相变的电工钢热轧起浪的有限元分析[J].哈尔滨工业大学学报, 2016,48(1):146-151.DOI:10.11918/j.issn.0367-6234.2016.01.022.
CAO Jianguo, TANG Hui, YANG Guanghui, et al.Finite element analysis of edge wave for non-oriented electrical strip with high temperature phase transition[J].Journal of Harbin institute of technology, 2016,48(1):146-151.DOI:10.11918/j.issn.0367-6234.2016.01.022.
[87]王菲露.基于神经网络方法的三维力柔性触觉传感器阵列解耦研究[D].合肥:中国科学技术大学, 2014.
WANG Feilu.Decoupling research of three-dimensional force flexible tactile sensor array based on neural network methods[D].Hefei:University of Science and Technology of China, 2014.
[88]许德成,郭小辉.用于仿生皮肤的电容式三维力触觉感知系统[J].吉林大学学报(信息科学版), 2015,33(6):652-657.
XU Decheng, GUO Xiaohui.Capacitive three-dimensional force tactile perception system for artificial skin[J].Journal of Jilin University ( Information Science Edition), 2015,33(6):652-657.
[89]陶镛汀,周俊,孟一猛,等.果蔬表面粗糙度特性检测触觉传感器设计与试验[J].农业机械学报, 2015,46(11):16-21.DOI:10.6041/j.issn.1000-1298.2015.11.003.
TAO Yongting, ZHOU Jun, MENG Yimeng, et al.Design and experiment of tactile sensors for testing surface roughness of fruits and vegetables[J].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(11):16-21.DOI:10.6041/j.issn.1000-1298.2015.11.003.
[90]张庭.仿人型假手指尖三维力触觉传感器及动态抓取研究[D].哈尔滨:哈尔滨工业大学, 2014.
ZHANG Ting.Research on fingertip three-dimensional force tactile sensor and dynamic grasp for anthropomorphic prosthetic hand[D].Harbin:Harbin Institute of Technology, 2014.
(编辑 杨 波)
封面图片说明
封面图片来自本期论文“电子皮肤触觉传感器研究进展与发展趋势”,是北京科技大学曹建国教授课题组制作完成的电子皮肤触觉阵列传感器及其高柔弹性的展示。该课题组提出了一种基于“多孔PDMS”和AgNWs/PDMS纳米复合材料导电薄膜电极层的新型多层“三明治”式压力传感器阵列结构.采用了纳米制造、电子束蒸镀、磁控溅射、氧等离子体处理、3D打印、仿生设计和有限元仿真等先进制造技术,研制出新型高柔弹性电子皮肤触觉阵列传感器.首先,制作基于纳米复合材料的柔弹性导电薄膜电极层;其次,利用力敏导电压阻橡胶开发了柔性压阻式压力传感器阵列;然后,采用多孔PDMS及力敏导电压阻橡胶制作柔弹性中间传感层;随后,设计采用新型多层"三明治"式压力传感器阵列结构等制作电子皮肤触觉阵列传感器;最后,实现传感器阵列的封装、拼合和裁剪,实现其可扩展性。这种电子皮肤触觉传感器空间分辨率达到4.5 mm×6.0 mm,可测量动态压力频率>5 Hz,具有高柔性、高弹性,其拉伸率可达到30%,超越了人类皮肤最大的拉伸率,还能在0~180 kPa大量程范围内实现高精度的测量,可扩展性好,性能稳定,可实现复杂表面或活动关节等的动态测量。
(图文提供: 曹建国, 周建辉, 缪存孝, 尹海斌, 李维奇, 夏 飞. 北京科技大学 机械工程学院)
Research progress and development strategy on tactile sensors for e-skin
CAO Jianguo1,2, ZHOU Jianhui1,3, MIAO Cunxiao1, YIN Haibin4, LI Weiqi1, XIA Fei1
(1.School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China;2.Jacobs School of Engineering, University of California-San Diego, San Diego 92093, USA;3.Qianan College, North China University of Science and Technology, Tangshan 064400, Hebei, China;4.School of Mechanical and Electrical Engineering, Wuhan University of Technology, Wuhan 430070, China)
Starting from the tactile sensing performance of human skin, the progress and key technologies of tactile sensors for e-skin (electronic skin) akin to human skin by multidisciplinary fields are comprehensively reviewed.The sensing principle, new materials and structures, advanced design and making methods, sensing characteristics and performance of tactile sensors are analyzed.The recent domestic and foreign research advances of electronic skin tactile sensor array in flexibility, elasticity, spatial resolution, sensitivity, fast response, transparency, lightweight, multifunction and other aspects are summarized.It is difficult to achieve the tactile sensors for e-skin with high stretchable and flexible, less complex production process for high sensitivity e-skin, strong extensibility and low cost.The tactile sensors for e-skin can be widely used in robotics, medical health, aeronautics and space military, intelligent manufacturing, automotive security and other fields.The development of tactile sensors for e-skin toward the direction of high stretchable and flexible, high sensitivity in wide range, multifunction, self-healing and self-cleaning, self-powered and transparent, has been pointed out.
e-skin; sensor; stretchable and flexible; tactile; bionic robot
10.11918/j.issn.0367-6234.2017.01.001
2016-03-02
国家留学基金委公派高级研究学者项目(201308110343); 中央高校基本科研业务费专项(FRF-BR-15-038A)
曹建国(1971—), 男, 教授, 博士生导师
曹建国, geocao@ustb.edu.cn
TP212
A
0367-6234(2017)01-0001-13
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
海外星云(2021年6期)2021-10-14
军事文摘·科学少年(2021年9期)2021-10-13
文化创新比较研究(2020年7期)2021-01-13
家庭影院技术(2020年2期)2020-03-25
模具制造(2019年4期)2019-06-24
特别健康(2018年3期)2018-07-04
小布老虎(2017年2期)2017-07-31