
基于改进人工势场法的机器人路径规划
2017-02-03 05:04马晓璐张持健郑奎昂邹鹏飞
电子设计工程 2017年21期
马晓璐,张持健,郑奎昂,邹鹏飞
(安徽师范大学物理与电子信息学院,安徽芜湖241000)
在移动机器人研究领域,路径规划是一个主要组成部分[1],是机器人导航中最重要的任务之一。蒋新松在文献[2]中为路径规划下的定义为:路径规划是自治式移动机器人的一个重要构成部分,它的目的就是在具有障碍物的环境内凭据相应的评定准则,找到一条从初始状态(包含位置和姿态)抵达目标状态(包含位置和姿态)没有发生碰撞的路径。在过去的几十年里,路径规划在相关领域内取得越来越多的眷顾。按照机器人获取环境信息的不同情况,路径规划问题大致划分为两类,一是基于环境先验信息的全局路径规划,其方法主要有距离转换法,构型空间法、拓扑法等。二是传感器信息引导的局部路径规划,其主要有模糊逻辑法、启发式搜索法、人工势场法等方法。
人工势场法相对其他算法具有反应快、计算速度快、硬件要求低、易于理解等优势,但传统的势场法也容易出现陷入陷阱区域,无法完全在动态环境中适应等固有问题,在路径规划中大大的影响势场法的使用。针对人工势场法路径规划失败问题,一部分研究者将改进人工势场法结合遗传算法、模糊算法、稀疏搜索算法等规划出正确的路径,但此类算法计算量大且复杂耗时,作为后续的路径优化尚可,另一部分研究者通过调整算法策略,即在不改变参数的前提下,基于人工势场法采用相对简单的策略来解决,文献[3]提出一种带记忆功能的“沿边法”,通过沿着障碍物边缘行走来逃离局部最小值点,但会造成路径变长,不能实现最优路径;文献[4]中笔者对于局部最小值点的问题的解决是利用随机力的方法来构造新的人工势场法函数,所依据的环境信息是局部的,随机性较高,缺乏全局环境上的自我调节能力;文献[5]中作者通过采用入侵杂草法获得最优临时目的地,场区内的引力势的临时目的地将会被从新搭配,引导机器人走出局部最小值点,但此算法过于繁琐。文献[6]中作者采取作为最优解的先验知识来初始化蚁群的相关参考因数,单独蚁群算法的优化计算速度能够大大的提高,但容易出现早熟现象,且计算开销较大,对机器人运动的实时性会产生影响。
针对移动机器人无法抵达目标点的问题,本文将重新构建引力和斥力函数,使得斥力势函数取值不仅受到障碍物与移动机器人空间关系的影响,同时也受到目的地与移动机器人的空间相对位置影响,从而使得障碍物、移动机器人与目的地三者互相影响,当障碍物靠近目标点时,引力势与斥力势会按照一定的规则向着削弱的方向发生改变直到没有。仿真结果表明,经过对人工势场法的修改,机器人能够更好地克服目标不可达以及局部最小值点的不足,并且在最优路径选择方面提升了效率,在全局环境中具有较高的指导性。
1 传统与改进后的人工势场算法
1.1 传统的人工势场法
经过多年的发展由Khatib于1986年最先提出的人工势场法概念,已经成为路径规划中较为高效、成熟的规划方法,其方法是用势场来定义移动机器人当前所在环境,假设机器人在二维的区域里运动,定义人工势场法引力场和斥力场,引力场是由目标点产生,对机器人产生的引力随机器人与目标点间距离的减小而减小,方向指向目标点。斥力场是由障碍物产生的,对机器人产生的斥力随机器人与障碍物间距离的不断缩小而增大,方向背离障碍物,引力场和斥力场共同决定机器人的运动方向,合力为斥力引力之和。
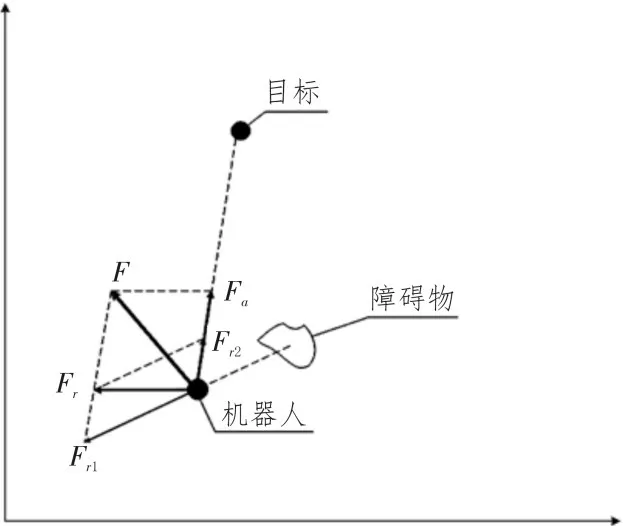
图1 传统人工势场示意图
1.2 改进后的人工势场法函数
本文使用的引力场函数模型为[8]为改进后的人工势场函数,依然包括引力场函数和斥力场函数。

式中,ka为引力场增益函数,X为移动机器人在当前所在的坐标,Xg是终点的坐标,
ρ(X-Xg)为移动机器人与终点的距离。
本文采用的斥力势函数模型为[9]

上式中,kr为斥力场增益系数,Xb是障碍物所在位置坐标是移动机器人与障碍物的之间的长度为移动机器人与终点位置之间的距离中的指数2的选择依照文献[9]中公式(3-9)对指数的要求,ρ0为障碍物的影响距离。
改进人工势场法中移动机器人的改合力势为

1.3 改进的人工势场法的路径规划分析
本文在移动机器人上均匀安装超声波探头,使用检测障碍物的相对位置来确定合力势从而确定移动机器人的下一时刻的方向。
1)超声波探头位置的确定

2)超声波探头引力场

3)超声波探头斥力场
4)超声波探头的合力势场

5)最小合力势场的探头角度

6)下一时刻到达的位置

2 仿真与结果分析
为了证明此算法的实用性,用传统人工势场法和本文改进的方法对复杂环境的机器人路径进行规划仿真测验,运动轨迹用matlab软件进行仿真,改进后的势场法运算步骤如下:
第1步:建立机器人定位坐标系;
第2步:给出障碍物点,移动机器人坐标点、终点的位置和事先定义的移动步长;
第3步:计算机器人与目标点之间的引力,以及引力在水平方向和竖直方向上的数值;
第4步:建立临时的目标点;
第5步:计算机器人与各障碍物之间的斥力,求出合力,以及在数轴X、Y方向上的分量;
第6步:计算引力与斥力共同产生的合力,以及合力与水平方向上存在夹角θ;
第8步:判断机器人与目标点距离是否能完成避障规划,若不能则转到第4步进行计算。
算法流程图,如图2所示。
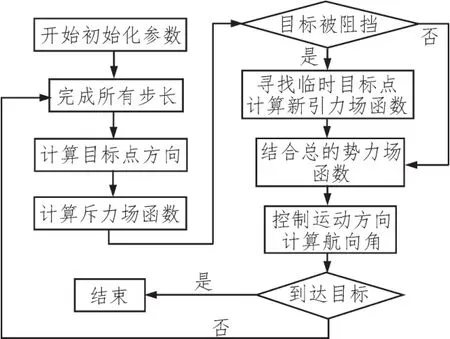
图2 流程图
分别采用传统的人工势场法和改进后的人工势场法对机器人无法达到目标点的问题进行仿真测验,得出的结果如图3~4所示,对比可以看到,当目标点周围有障碍物存在时,使用传统人工势场法无法使机器人抵达目标点,当采用本文提出的人工势场法时,机器人能够顺利躲避障碍物,精准无误地抵达最终位置。(图中无规则方块表示障碍物,五角星表示目标点的位置,三角形表示起始点位置,下图同)
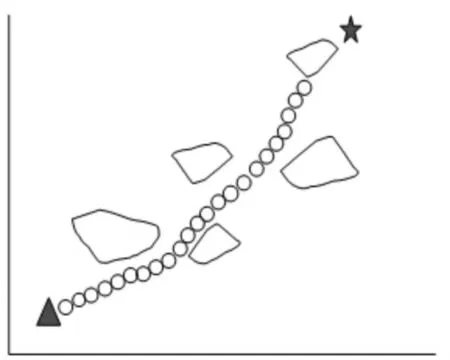
图3 传统人工势场法

图4 改进后的人工势场法
对于机器人存在局部极小值问题,运用传统人工势场法,运行结果的行走路线如图5所示,从图中不难看出,当机器人在运动中所受的合力为零时,使用传统的人工势场法,机器人会出现踟蹰不前,在小范围内来回移动,无法走出陷阱区域,陷入局部最小值点的困境。

图5 采用传统算法复杂环境下机器人陷入局部最小值点
采用文献[3]提出的算法,仿真结果的机器人行动路径如图6所示,机器人沿着边沿移动,跳出局部最小点,最终到达目标点。
通过实验可以看出,在本文中所采用的势场法对障碍物有一定的规避能力(如图7),从规划路径来看,机器人避开所有障碍物,并且跳出所遇到的局部最小值点,准确地到达目标点,对比文献[3]的算法,其路径长度相对更短,更能满足路径规划的实时性要求。
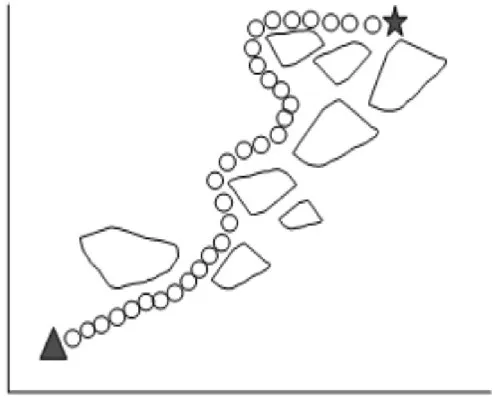
图6 采用文献[3]算法复杂环境下机器人的行动路径

图7 采用本文算法复杂环境下机器人的行动路径
3 结束语
在机器人路径规划方法中,人工势场法对于障碍物环境变化较快的情况具有很好的实时性,但也存在目标不可达和局部最小值点的问题。基于本文研究的传统人工势场法原理,对于这些存在的一些问题,重新定义势力场函数,并且增加入了运动因子,将算法编写了仿真程序,研究结果表明,相对于传统的人工势场法,改进后的人工势场法在复杂环境下进行避障规划时,机器人克服了势场法容易产生局部最优而找不到可行解缺陷,提高了算法效率以及适应性,满足避障路径规划的要求。但在现实应用中还要考虑路径规划的实时性,以及移动障碍物、多机器人运动存在的特殊碰撞问题。这些工作还需进一步研究。
[1]欧青力,何克忠.室外智能移动机器人的发展及其关键技术研究[J].机器人,2000,22(6):519-526.
[2]蒋新松.机器人学导论[M].辽宁科学技术出版社,1994.
[3]Huang Y ,Hu H,Liu X.Obstacles avoidance of artificialpotentialfield method with memory function in complex environment:proceedings of the 8thWorld Congress on Intelligent Control and Automation,Jinan,July 7-9,2010[C].[S.1.]:IEEE,2010.
[4]Lee,J(Lee,Jinseok),Nam,Y(Nam,Yunyoung),Hong,S(Hong,Sangjin),Cho,W(Cho,Weduke).New PotentialFunction swith Random Force Algorithms Using Potential Field Method[J].Journal of Intelligent&Robotic Systems,2012,66(3):303-319.
[5]李海峰,马斌等.基于人工势场法与入侵杂草法路径规划研究[J].控制工程,2015,22(1):38-44.
[6]李奕铭.基于人工势场法的移动机器人避障研究[D].合肥:合肥工业大学,2013.
[7]Khatib O.Real-time obstacle avoidance for manipulators and mobile robots[J].Internationgal Journal of Robotics Research,1986,5(1):90-98.
[8]于振中,闫继红.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50-55.
[9]刘亮.基于势场蚁群算法的移动机器人路径规划研究[D].广州:暨南大学,2009.
[10]王会丽,傅卫平.基于改进的势场函数的移动机器人路径规划[J].机床与液压,2002(6):67-68.
[11]丁家如,杜昌平,赵耀,等.基于改进人工势场法的无人机路径规划算法[J].计算机应用,2016,36(1):287-290.
[12]孙绍杰,齐晓慧,苏立军.基于人工势场-遗传算法的机械臂避障方法的研究[J].计算机测量与控制,2011,19(12):3078-3081.
[13]Yuanchang Liu,Rui Song,Richard Bucknall.A practical path planning and navigation algorithm for an unmanned surface vehicle using the fast marchinh algorithm[J].Oceans,2015:1-7.
[14]单宝明,周培培.基于改进人工势场法的机器人路径规划研究[J].信息技术,2014,1(4):170-173.
[15]王芳,李昆鹏,袁明新.一种人工势场导向的蚁群路径规划算法[J].计算机科学,2014,41(11A):47-50.
[16]罗乾又,张华,王妲,等.改进人工势场法在机器人路径轨划中的应用[J].计算机工程与设计,2011,32(4):1411-1418.
[17]Gómez J V,Lumbier A,Garrido S,et al.Planning robot formations with fast marching square including uncertainty conditions[J].Robotics and Autonomous Systems,2013,61(2):137-152.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
高技术通讯(2021年5期)2021-07-16
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
石油地球物理勘探(2017年4期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
系统工程与电子技术(2016年4期)2016-08-24
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
