
基于双源IR-UWB生物雷达的强反射杂波抑制
2017-01-19 07:47:20张芫蓓王帅杰王昊祁富贵王健琪李钊
中国医疗设备 2016年11期
张芫蓓,王帅杰,王昊,祁富贵,王健琪,李钊
第四军医大学 生物医学工程系,陕西西安 710032
基于双源IR-UWB生物雷达的强反射杂波抑制
张芫蓓,王帅杰,王昊,祁富贵,王健琪,李钊
第四军医大学 生物医学工程系,陕西西安 710032
在基于生物雷达的生命探测技术研究中,强反射杂波干扰对雷达回波的信噪比影响十分重要,普通的信号处理方法很难将其去除,从而使雷达系统发生误判或者漏判。本文在现有超宽带生物雷达技术的基础上,提出了一种基于双源IR-UWB生物雷达的强反射杂波抑制方法。利用两种不同中心频率的天线同时进行探测,首先对不同频率雷达回波信号分别进行通道内处理,实现人体微弱生命信号的增强;然后进行通道间处理,并采用自适应杂波消除技术抑制雷达回波中的强反射杂波干扰。在穿透砖墙和废墟两种不同场景下进行实验,结果表明本文所提出的方法可以明显提高雷达探测的准确率。
超宽带;生物雷达;生命探测;自适应杂波消除技术;杂波抑制
引言
超宽带(Ultra-Wide Band,UWB)生物雷达融合了雷达技术和生物医学工程技术,通过发射出的电磁波穿透非金属介质(木板、墙壁、废墟等),检测到生命体目标的体动,或者呼吸、心跳等生命体征引起的体表微动,并以此为依据探测和识别生命体目标。与基于红外、光学和超声的探测技术相比,UWB生物雷达因其具有非接触、穿透性强、能够获得目标距离信息、抗干扰能力强等特点,可广泛应用于医学、军事、反恐等领域,特别是在地震、塌方等灾害发生后的应急救援中,具有不可替代的优势[1-5]。
目前的UWB生物雷达技术多采用冲激脉冲(Impulse Radio,IR)雷达,它是以固定的脉冲重复频率发射超短脉冲来实现超宽带的[6-7]。IR-UWB生物雷达在地震、塌方等灾后应急救援场景中,通常采用小时窗分段探测技术来提高雷达的探测精度和回波信噪比[8]。但当目标压埋较深,距离雷达较远时,使用这种技术就会增加探测时间,影响探测效率。因此,为了能够更加快速准确地发现幸存人员,应当使用大时窗探测技术。
但是当生物雷达进行大时窗探测时,由于探测环境十分复杂,雷达发射的电磁波通常需要穿透多种不同介质才能照射到被压埋的人体目标。当IR-UWB生物雷达发射的电磁波穿过两种介电常数不同的介质(如砖和空气)时,由于雷达硬件电路不可能工作在理想条件下,发射脉冲必然会产生细微抖动,原本应该静止的不同介质交界面处的雷达回波,将会随时间不断变化,产生强反射杂波[9-10]。有时这种强反射杂波和人体的呼吸信号十分相近,普通的雷达回波信号处理方法很难将其去除,从而导致雷达系统发生误判或者漏判,浪费宝贵的救援时间和资源,影响对幸存人员的搜救[11]。
在以往的IR-UWB生物雷达探测研究中,为了消除这种由强反射障碍物引起的非静态杂波,有研究通过在人体目标身后放置吸波材料来消除砖墙、地面等带来的强杂波干扰[12-13],但是这种方法只能在实验研究中运用,无法应用在实际的灾后搜救场景中;还有研究通过改变雷达回波的起始位置将这种非静态杂波干扰调整到雷达接收时窗之外[14],但这种方法会导致探测时出现盲区,影响雷达系统的实用性;还有些研究利用特殊的雷达回波信号处理算法,对这种非静态杂波的消除具有一定的效果,但是当障碍物距离人体目标非常近时(如人体靠墙站立或平躺在地面上),由障碍物发射产生的非静态杂波和人体目标的呼吸信号就变得更加难以区分[15-16]。
本文提出了一种基于双源IR-UWB生物雷达的强反射杂波抑制方法,利用两种不同中心频率的天线,通过等效时间采样和分时复用技术同时对目标进行探测,再配合自适应杂波消除算法,能够有效地抑制这种强反射杂波干扰,提高雷达判断的准确率。
1 基于双源IR-UWB生物雷达的通道内处理算法
双源IR-UWB生物雷达的发射天线发射雷达脉冲,雷达脉冲被人体目标反射,再通过双源IR-UWB生物雷达的接收天线接收到被人体目标反射后的雷达脉冲,即雷达原始回波信号。双源IR-UWB生物雷达包含两对具有不同中心频率的天线,每对天线均包括一个发射天线和一个接收天线,两个接收天线接收到两个具有不同中心频率的雷达原始回波信号R1和R2。分别对这两个通道的回波信号做通道内处理,具体步骤如下:
1.1 距离累积
用R表示任意一个通道内的雷达原始回波信号,R可以表示为二维矩阵R(m,n)。雷达原始回波信号二维矩阵示意图,见图1。图 中横轴表示探测时间,称为“慢时间”,沿着探测时间的方向为慢时间方向,单位是s;纵轴表示探测距离,称为“快时间”,沿着探测距离的方向为快时间方向,单位是ns。在某一时刻,沿着快时间方向的信号,即二维矩阵的列向量,叫做“道信号”;在某一距离点上,沿着慢时间方向的信号,即二维矩阵的行向量,叫做“点信号”。由于快时间方向上邻近距离点处的雷达回波的调制方式大致相同,且具有一定的相关性,因此,在不影响有用信息的前提下,首先对二维矩阵R(m,n)在空间域沿着快时间方向进行距离累积,即:

式中,R1(l,n) (l=1,2,...,L)为距离累积后的雷达回波数据,Q为沿着快时间方向累积的窗宽,L为累积后在快时间方向的距离点数,且其中表示向下取整,设定窗宽Q=40,采样点数M为8192,则L为200,从而大大降低了雷达数据处理的运算量,减少了探测所需的运算时间,提高了废墟搜救幸存人员的工作效率。

图1 雷达原始回波信号二维矩阵示意图
1.2 归一化
距离累积后的雷达回波信号R1在时间域沿着慢时间方向进行归一化处理,得到归一化后的雷达回波信号R2。为了增强距离雷达较远处目标信号的幅度,补偿信号在穿透和传播过程中的衰减,提高雷达回波信号的信噪比,对距离累积后的信号R1,在时间域沿着慢时间方向进行点信号的归一化处理,即:

式中,R2(l,n)为归一化后的雷达回波数据,N为R1中包含的道信号的个数。雷达回波数据R1(l,n)经过归一化处理后,每个距离上的点信号的幅值范围都在-1到1之间。
1.3 线性趋势消除
对雷达回波信号R2进行线性趋势消除,得到雷达回波信号R3。由于IR-UWB生物雷达的硬件不可能在理想条件下工作,采集数据过程中往往伴随着回波基线的漂移。因此,本文采用线性趋势消除(Linear Trend Subtraction,LTS)来去除雷达回波信号R2中的静态杂波以及线性漂移,LTS通过线性最小二乘拟合估计出雷达回波信号R2在慢时间方向上的直流分量和线性趋势后,再从回波数据中减去,即:

式中,R3表示LTS后的雷达回波信号,
y = [n/N,IN],n = [0,1,2,...,N-1]T,IN为一个长度是N且元素都是1的列向量,N为R2中包含的道信号的个数。
1.4 低通滤波
对雷达回波信号R3进行低通滤波,得到滤波后的雷达回波信号R4。由于IR-UWB生物雷达的硬件在工作过程中不可避免的会产生高频噪声,而且人体目标的呼吸信号又是一个窄带的准周期信号,因此,为了进一步提高雷达回波的信噪比,就需要在慢时间方向上对雷达回波信号R3的点信号进行低通滤波:

式中,R4(l,n)为滤波后的雷达回波数据,“*”表示卷积运算,h(t)为有限冲击响应(Finite Impulse Response, FIR)滤波器的冲击函数。根据人体的呼吸频率,该算法中低通滤波器的截止频率为0.5 Hz。
按照上述4个步骤,分别对两个通道内的雷达原始回波信号R1和R2进行通道内处理,得到处理后的雷达回波信号R41和R42。
2 基于双源IR-UWB生物雷达的通道间处理算法
本文中双源IR-UWB生物雷达包含中心频率分别为270 MHz和400 MHz的两对蝶型天线,采用等效时间采样、多通道分时复用技术,实现不同中心频率天线每发射出一道信号后交替工作,从而使两种中心频率的天线在工作时相互不产生干扰。由于两对不同中心频率的天线分时复用交替探测,且交替时间间隔非常短,可近似认为两对天线同时对目标进行探测,两对不同频率的雷达回波中人体呼吸信号具有一定的相关性;但是两对天线的脉冲发射源是相互独立的,因此产生的脉冲抖动是随机的,不具有相关性。
R41和R42分别是中心频率为270 MHz和400 MHz通道内处理后的雷达回波信号。对R41和R42进行自适应杂波消除,得到人体呼吸信号的估计值S(k)。基于双源IRUWB生物雷达的通道间处理具体算法的原理,见图2。主输入信号y(k)为提取的雷达回波信号R41的点信号,由人体目标的呼吸信号S1(k)和非静态杂波n1(k)组成,而参考信号x(k)为提取的雷达回波信号R42的点信号,由人体目标的呼吸信号S2(k)和非静态杂波n2(k)组成。由于两对不同中心频率的天线同时对人体目标进行探测,因此呼吸信号S1(k)和S2(k)具有一定的相关性,又由于两对天线的脉冲发射源是相互独立的,因此产生的脉冲抖动是随机的,非静态杂波n1(k)和n2(k)不具有相关性。利用误差信号e(k),通过最小均方算法调整FIR滤波器的参数,使滤波器的输出信号S(k)为相关的人体呼吸信号的估计值,将雷达回波信号中的强反射杂波等非静态杂波去除,计算步骤如下:

其中,FIR滤波器的阶数L=50,步长因子μ=10-5,权系数向量ωi(k)的初始值全是0,k表示输出信号S(k)中的数据序号。
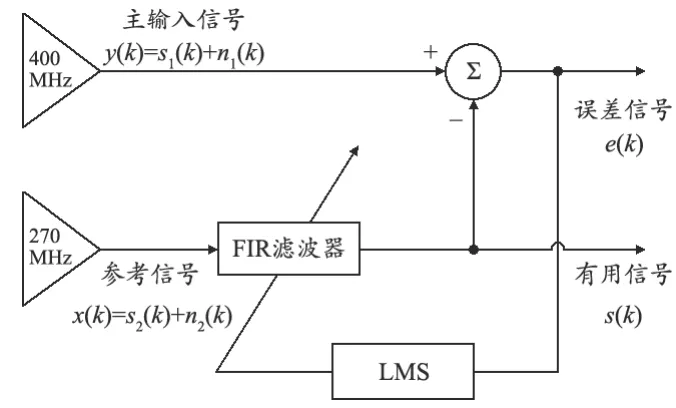
图2 自适应杂波消除算法的原理框图
3 双源IR-UWB生物雷达探测实验
3.1 穿墙实验
穿墙探测场景,见图3。房间内两堵平行的砖墙厚度均为24 cm,将双源IR-UWB生物雷达系统摆放在其中一堵墙后,对无人的房间进行探测。探测完成后,一名健康成年男子紧靠另一堵墙且正对雷达站立,平静呼吸,身体保持静止,雷达与人体目标之间的距离约为3 m,对其进行探测。

图3 穿墙探测场景示意图
为了能够更加直观地识别人体目标的呼吸信号及其所在位置,对处理后的雷达回波数据沿慢时间方向计算每个距离上的点信号的方差,得到雷达回波信号的能量谱。在有人体目标和无人体目标两种情况时,采用普通IR-UWB生物雷达处理方法(基于单源IR-UWB生物雷达的常规处理算法[16])得到的雷达回波数据能量谱,见图4。从图4(a)中可以看出,3 m附近的能量值明显大于其余位置的能量值,这正是由人体目标的呼吸引起的。而图4(b)中,3 m附近也出现了很明显的能量峰值,这是因为IR-UWB雷达在探测过程中,人体身后的墙产生了强反射杂波干扰,它与人体目标的呼吸信号十分相似,无法通过普通的IRUWB生物雷达处理方法滤除。因此,通过普通的生物雷达探测技术,有人体目标和无人体目标两种情况的雷达回波数据都被判断为探测区域内有人体目标,且目标距离都约为3 m,图4(b)的回波数据产生误判。
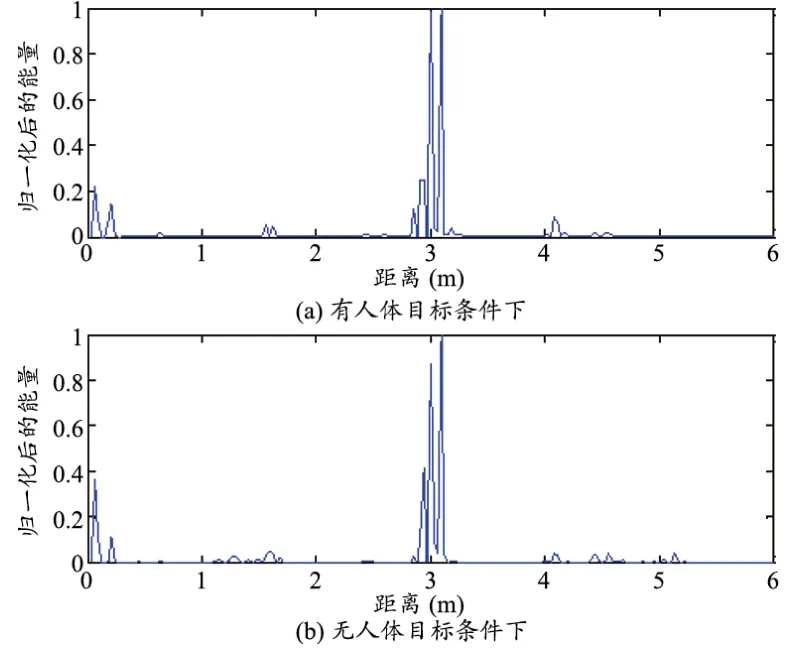
图4 穿墙场景采用普通方法处理的雷达回波数据能量谱
在有人体目标和无人体目标两种情况时,采用基于双源IR-UWB生物雷达的强反射杂波抑制方法得到的雷达回波数据能量谱,见图5。从图5(a)中可以看出,只有3 m附近的能量峰值较强,其最大值在2.88 m处,正好是人体目标所站的位置。而图5(b)中有多处较强的能量峰值,这是由于能量谱进行归一化后,原本很小的峰值都变得比较明显。实际上,出现在图4(b)中近似呼吸的强反射杂波已经被较好的抑制。因此,图5(b)中雷达回波数据的判断结果为探测区域内无人体目标,与实际情况相符。

图5 穿墙场景采用基于双源IR-UWB生物雷达的强反射杂波抑制方法处理的雷达回波数据能量谱
3.2 穿废墟实验
穿废墟探测场景,见图6。模拟废墟高度约为3 m,包括两个10 cm厚的混凝土预制板,两段厚度约为1 m的砖块堆,还有一个高度约为80 cm的废墟空洞。IR-UWB雷达系统放置在模拟废墟顶端,方向朝下进行探测。探测完成后,一名健康成年男子平躺在废墟空洞中,胸壁正对雷达,平静呼吸,身体保持静止,雷达与人体目标之间的距离接近3 m,对其进行探测。
在有人体目标和无人体目标两种情况时,采用普通IRUWB生物雷达处理方法得到的雷达回波数据能量谱,见图7。两幅图的能量波形很相似,都存在多处较强的能量峰值,这主要是因为IR-UWB雷达系统在穿透模拟废墟探测过程中,由于雷达脉冲的抖动,在两种介质(预制板和空气、砖和空气)的交界面处原本应该静止的雷达回波却随慢时间不停变化,产生近似呼吸的强反射杂波干扰。因此,两幅图的雷达回波数据判断结果都是探测区域内无人体目标,图7(b)的探测结果发生了漏判。

图6 穿废墟探测场景示意图
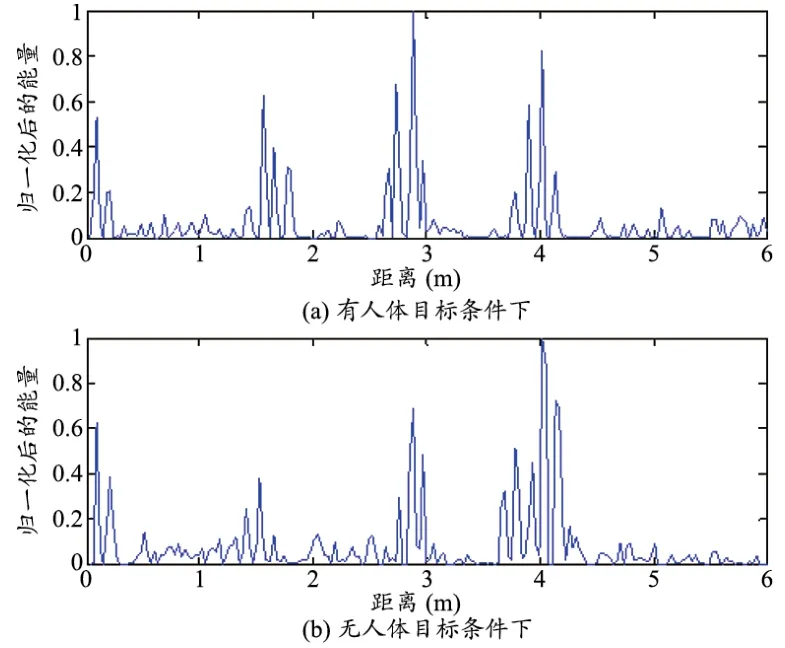
图7 穿废墟场景采用普通方法处理的雷达回波能量谱
在有人体目标和无人体目标两种情况时,采用基于双源IR-UWB生物雷达的强反射杂波抑制方法得到的雷达回波数据能量谱,见图8。虽然图8(a)中仍存在多处较强的能量峰值,但实际上由废墟交界面产生的近似呼吸的强反射杂波已经被大大的削弱了,只是能量归一化使得原本幅度很小的能量峰值又变得比较明显。因此,这幅图的回波数据判别结果为探测区域内无人体目标,与实际情况相符。图8(b)中只剩下一处较强的能量峰值,这正是人体目标的呼吸能量,其能量最大值在4.05 m处。由于该坐标距离计算的是电磁波在空气中的传播距离,而电磁波在该模拟废墟中的衰减很大,经过距离校准后的实际位置约为2.83 m,与人体目标所躺的位置相符。
4 结语
在基于IR-UWB生物雷达的生命探测技术研究中,强反射杂波干扰对雷达回波的信噪比影响十分重要。本文采用一种双源IR-UWB生物雷达配合自适应杂波消除方法能够较好地抑制不同场景中的强反射杂波干扰,提高了生物雷达系统判断的准确率,为该领域的进一步发展提供了新的研究思路和方法。
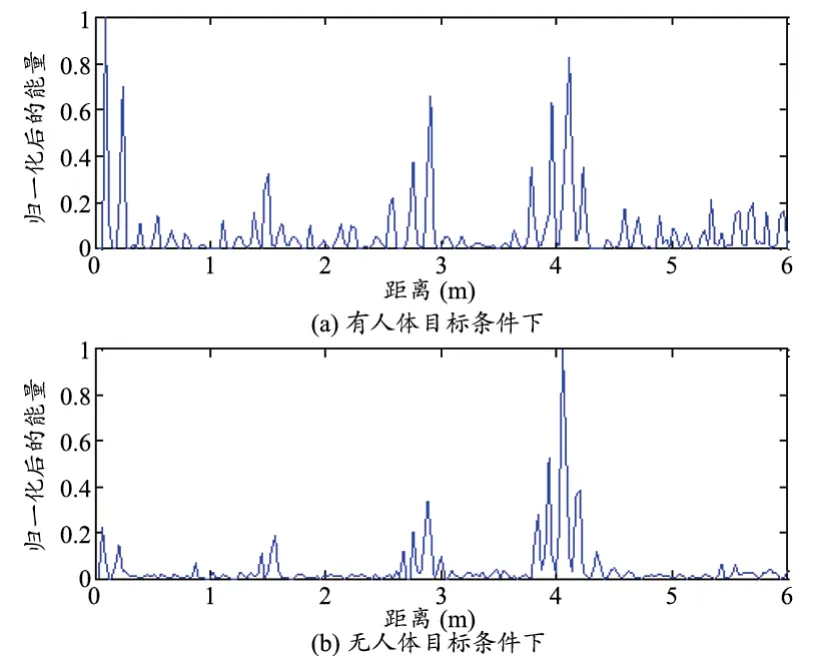
图8 穿废墟场景采用基于双源IR-UWB生物雷达的强反射杂波抑制方法处理的雷达回波能量谱
[1] Kumar A,Li Z,Liang Q,et al.Experimental study of throughwall human detection using ultra wideband radar sensors[J]. Measurement,2014,47(1):869-879.
[2] Lou J,Wang Y.Implement of UWB Radar for Human Life Detection[J].Appl Mech Mater,2012,239-240:348-352.
[3] Liu L,Liu Z,Xie H,et al.Numerical simulation of UWB impulse radar vital sign detection at an earthquake disaster site[J].Ad Hoc Networks,2014,13(1):34-41.
[4] Wang Y,Yu X,Zhang Y,et al.Detecting and monitoring the micro-motions of trapped people hidden by obstacles based on wavelet entropy with low centre-frequency UWB radar[J].Int J Remote Sens,2015,36(5):1349-1366.
[5] Ren L,Yun SK,Wang H,et al.Noncontact Multiple Heartbeats Detection and Subject Localization Using UWB Impulse Doppler Radar[J].IEEE Microw Wireless Compon Lett,2015, 25(10):690-692.
[6] Gezici S.Theoretical Limits for Estimation of Periodic Movements in Pulse-Based UWB Systems[J].IEEE J Sel Top Signal Process,2007,1(3):405-417.
[7] Lazaro A,Girbau D,Villarino R.Analysis of Vital Signs Monitoring Using an Ir-UWB Radar[J].Prog Electromagn Res, 2010,100(1):265-284.
[8] 安强,李钊,吕昊,等.UWB搜救生物雷达分段时窗探测系统的实现[J].中国医疗设备,2015,30(11):18-21.
[9] Nezirovic A.Stationary clutter-and linear-trend suppression in impulse-radar-based respiratory motion detection[A].Ultra-Wideband (ICUWB),2011 IEEE International Conference on[C].New York:IEEE,2011:331-335.
[10] Crabbe S.Detection and localization of persons behind obstacles using M-sequence through-the-wall radar[J].Proc Spie,2006(6201):62010I-62010I-12.
[11] 梁福来,李钊,安强,等.脉冲式超宽带生命探测雷达时间抖动抑制[J].雷达学报,2015,4(4):439-444.
[12] Nezirovic A,Yarovoy AG,Ligthart LP.Experimental study on human being detection using UWB radar[A].2006 International Radar Symposium[C].New York:IEEE,2006:1-4.
[13] Kiriazi JE,Boric-Lubecke O,Lubecke VM.Dual-Frequency Technique for Assessment of Cardiopulmonary Effective RCS and Displacement[J].IEEE Sensors J,2012,12(3):574-582.
[14] Tenenbaum B,Karshan M,Ziskin D,et al.Adaptive Ground Clutter Removal Algorithm for Ground Penetrating Radar Applications in Harsh Environments[J].Sens Imag Int J,2006, 7(3):71-89.
[15] Singh S,Liang Q,Chen D,et al.Sense through wall human detection using UWB radar[J].EURASIP JWCN,2011,(1):1-11.
[16] Lv H,Lu GH,Jing XJ,et al.A new ultra-wideband radar for detecting survivors buried under earthquake rubbles[J].Microw Opt Technol Lett,2010,52(11):2621-2624.
Suppression of Strong Clutter Based on the Dual-Frequency IR-UWB Bioradar
ZHANG Yuan-bei, WANG Shuai-jie, WANG Hao, QI Fu-gui, WANG Jian-qi, LI Zhao
Faculty of Biomedical Engineering, the Fourth Military Medical University, Xi'an Shaanxi 710032, China
In the study of life detection based on bioradar, strong clutter has a very important influence on the signal-to-noise ratio of radar echo. And it is difficult to be removed by using traditional signal processing methods, so that false alarm or missing result usually occurs in the complex environment. In the light of existing ultra-wideband (UWB) radar technology, this paper put forward a suppression method of strong clutter based on the dual-frequency IR-UWB radar, which could detect target at the same time by using two pairs of antennas with different center frequencies. At first, the radar echo signal was respectively processed in different channels to enhance the weak vital signal of human. Then in order to suppress the interference of strong clutters, the data of two channels were processed together with adaptive clutter elimination technology. Experiments were conducted in two different scenarios of brick wall and simulation ruins, and the results showed that the accuracy of radar detection could be significantly improved by using the method proposed in this paper.
ultra-wide band; bioradar; life detection; adaptive clutter elimination technology; clutter suppression
R318;TN957.51
A
10.3969/j.issn.1674-1633.2016.11.006
1674-1633(2016)11-0028-05
2016-09-18
2016-09-23
陕西省自然科学基础研究计划青年人才项目(2014JQ2-6034)。
作者邮箱:lizhaofmmu@fmmu.edu.cn
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
自动化学报(2018年2期)2018-04-12 05:46:16
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
西北工业大学学报(2015年3期)2015-12-14 13:08:44
导航定位学报(2015年2期)2015-06-05 09:27:38
遥测遥控(2015年2期)2015-04-23 08:15:22
现代防御技术(2014年6期)2014-02-28 18:26:39
现代防御技术(2014年6期)2014-02-28 18:26:38
