基于SolidWorks的存码垛机械手结构设计
2017-01-17 19:55刘慧梅陈艳张荣
东方教育 2016年20期
刘慧梅+陈艳+张荣
摘要:本文利用SolidWorks对用于箱类和袋类物品取放的存码垛工业机器人本体进行结构设计。存码垛工业机器人本体主要有基座、腰部、大臂、小臂、末端执行器、等部件组成。本设计对工业机器人的研究有一定的参考价值。
关键词:应用型本科;创新能力;机械制造基础;教学改革
1 Solidworks软件简介
SolidWorks是法国达索公司最先在Windows系统上开发的一款三维设计软件。其CAD功能方面涵盖了所有的设计类型,实体建模、曲面设计、二维工程图、装配、运动仿真、结构分析等功能一应俱全。创新的自顶向下设计过程使得设计工作一目了然,实时的更新功能使得工程师可以随时对产品特征参数进行动态修改。除此之外,SolidWorks还为不同的设计人群提供不同的功能模块,包括钣金、管道布线、电气设计等,使得设计过程简洁而丰富。
2 码垛机器人的发展
国外,最早将工业机器人技术用于物体的码放和搬运是日本和瑞典。1968年,日本第一次将机器人技术用于码垛作业。1974年,瑞典ABB公司研发了全球第一台全电控式工业机器人IRB6,主要应用于物品的取放和物料的搬运。随着计算机技术、工业机器人技术以及人工智能控制等技术的发展和日趋成熟,日本、意大利、德国、美国、瑞典、韩国等国家在码垛机器人的研究上做了大量工作,相应推出了自己的码垛机器人,如日本的FANUC和OKURA以及FUJI系列,德国的KUKA系列,瑞典的ABB系列等。工业机器人技术的飞速发展,使得码垛机器人在各个行业都得到了广泛的应用。
3 码垛机器人的工作对象
本文设计的码垛机器人的工作对象及其参数如下:
(1)码垛物品:箱类物品(如一箱纸巾)和袋类物品(如一袋洗衣粉)等。
(2)物品尺寸:长为200至500mm,宽为200至400mm,高为100至300mm。
(3)物品质量:每件物品为5至15kg。
(4)物品运动范围:以机器人为中心的,半径为3m,角度为90至180度。
4 码垛机器人结构设计
本文设计的码垛机器人为关节型机器人,这类机器人占地面积小、机构紧凑,工作空间大,还能穿过障碍物进行抓取,是机器人中使用最多的一种结构型式。码垛机器人的本体(即机械手)包括基座、腰部、大臂、小臂、末端执行器(俗称爪子),它的运动主要由码垛机械手手臂的俯仰运动和腰部的旋转运动组成。
4.1 手爪的结构设计
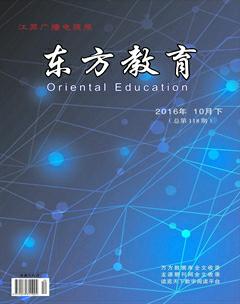
机械手臂末端抓取器大致可分为:夹钳式、专用操作式、吸附式、仿生多指式四类。由于工作对象为箱式或袋式物品,只需要设计能从不同角度抓取物品的夹钳式即可。其结构如图1所示,可以抓取不同大小多个种类的箱式或袋式货物。
4.2 臂部的结构设计
手臂部件(简称臂部)是机器人的重要执行部件,它的作用是支承腕部(关节)和手部(包括工件和工具),并带动它们在空间运动,臂部还安装一些传动驱动机构,从臂部的受力情况来看,它在工作中直接承受腕,手和工件的静动载荷,自身运动 又较多,所以受力情况复杂。
臂部主要是进行俯仰运动,这里采用铰接活塞缸实现臂部的俯仰运动。该机构的特点是,工作范围大、灵活性好。
4.2.1 大臂的结构设计
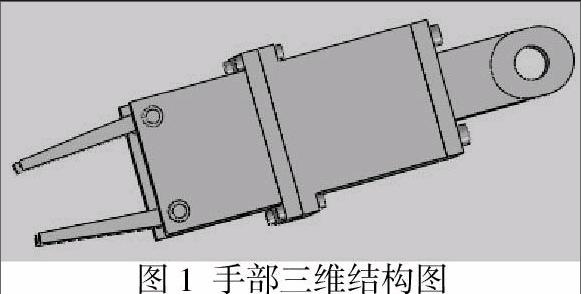
大臂是臂部的组成部分,它两端分别与小臂和立柱相连,它都是通过铰链连接。大臂的运动是通过与立柱相连的铰链活塞缸来进行运动传递的,它的运动轨迹就是一个圆弧形,通过活塞缸来进行俯仰运动,运动单一,结构简单。它较之小臂粗大,因为它是码垛机器人主要的受力部分之一。其三维结构如图2所示。
4.2.2 小臂的结构设计
小臂两端是与大臂和末端执行器连接,这里采用铰链连接,大臂与小臂之间的运动传递,采用铰接活塞缸来实现,其结构简单,运动性能好。小臂比之大臂在设计时材料消耗要比大臂少,体积也小,重量轻。其三维结构如图3.5所示。
4.3 立柱(腰部)的结构设计
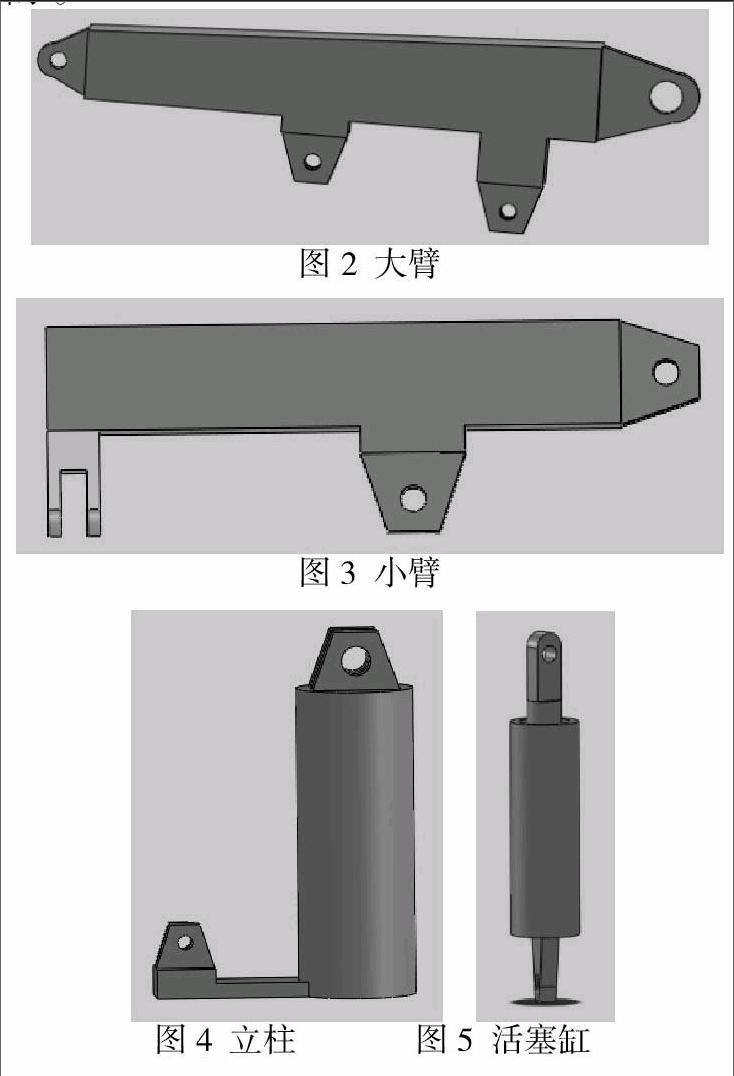
立柱主要是支撑大臂小臂的重量,连接大臂和底座,并且固定了活塞缸的运动范围。结合要求与设计过程,腰部的结构材料为合金结构钢,无经淬火与回火处理。其三维结构如图4所示。
4.4 活塞缸的设计
本次设计,我采用最多的动力传动方式就是活塞缸,因为它工作形式单一,只能进行伸缩运动,且结构简单,由缸体和活塞缸组成,并且它在机器人的设计中运用很广泛。其三维结构如图5所示。
4.5 底座的结构设计
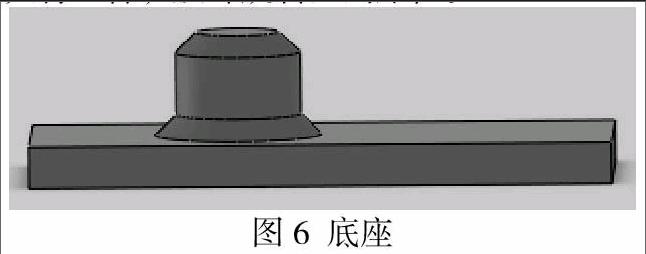
底座是承受码垛机器人整体重量的主要部件,且由于码垛机器人的手臂长,导致机器人整体重心并不在底座中线上,所以底座较为宽大。其三维结构如图6所示。基于底座在本次设计中的作用,选取底座的材料为铸铁,且设计底座尺寸为:长×宽×高= 280 mm×120 mm× 20 mm。
5 结论
码垛机械手的总体结构如图7所示,其运动是由腰部的旋转、手臂的俯仰、末端执行器的夹紧和放松组成。码垛机器人工作的全部流程:第一步,大臂处的活塞杆运动,带动小臂进行下伏运动,从而末端执行器接近物品,并通过夹紧缸将物品抓取;第二步,大臂进行上仰运动,带动物品上升;第三步,腰部回转缸进行回转运动,将物品移到堆放指定区域上空;第四步,大臂又下伏,将物品放在堆放台上,并且夹紧缸放松物品,最后大臂上仰,腰部旋转回到原位。
参考文献:
[1] 殷际英,何广平.关节型机器人[M].北京:化学工业出版社,2003.7.
[2] 侯国柱.关节型机器人的结构设计及其运动学分析[D].内蒙古工业大学,2007.
猜你喜欢
中学生学习报(2022年13期)2022-04-16
中学生学习报(2022年14期)2022-04-15
大学教育(2016年11期)2016-11-16
科教导刊(2016年25期)2016-11-15
企业导报(2016年20期)2016-11-05
中国市场(2016年36期)2016-10-19
成才之路(2016年25期)2016-10-08
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29