服务型机器人控制系统设计
2017-01-17 18:54齐凤争高圣伟姚景文李旭
东方教育 2016年21期
齐凤争+高圣伟+姚景文+李旭
摘要:随着社会的发展,科技的进步,机器人时代已经不知不觉地来到我们的身边。例如在一些公共场所(酒店、宾馆、餐厅)都可以看见机器人的身影,它们的到来减轻了服务人员的工作负担。相较于“传统”的机器人,在互联网的时代“服务机器人”的出现大大提高了机器人的“服务”能力。
关键词:服务;机器人;控制;科技
1.引言
随着社会的发展,科技水平的提高,机器人逐渐的走进我们的生活。生活中服务机器人备受人们喜爱。工厂巡检机器人的面孔,餐厅有送餐机器人,并且在一些大型的场所(商场、酒店、会所)也可以看到服务机器人的身影。服务型机器人在当前的社会是备受欢迎的。在互联网的时代下,机器人也可以受网络的控制进而提升它的功能,因此本文提出基于网络控制机器人设计思想。
2.总体方案的设计
本文提出利用网络控制系统来对机器人进行控制操作。其具有两种控制模式:一种是利用上位机的控制通过网络对机器人进行控制,另一种是利用语音模块通过语音识别算法来对机器人进行控制。而机器人的整体架构是基于总线控制思想进行设计的。
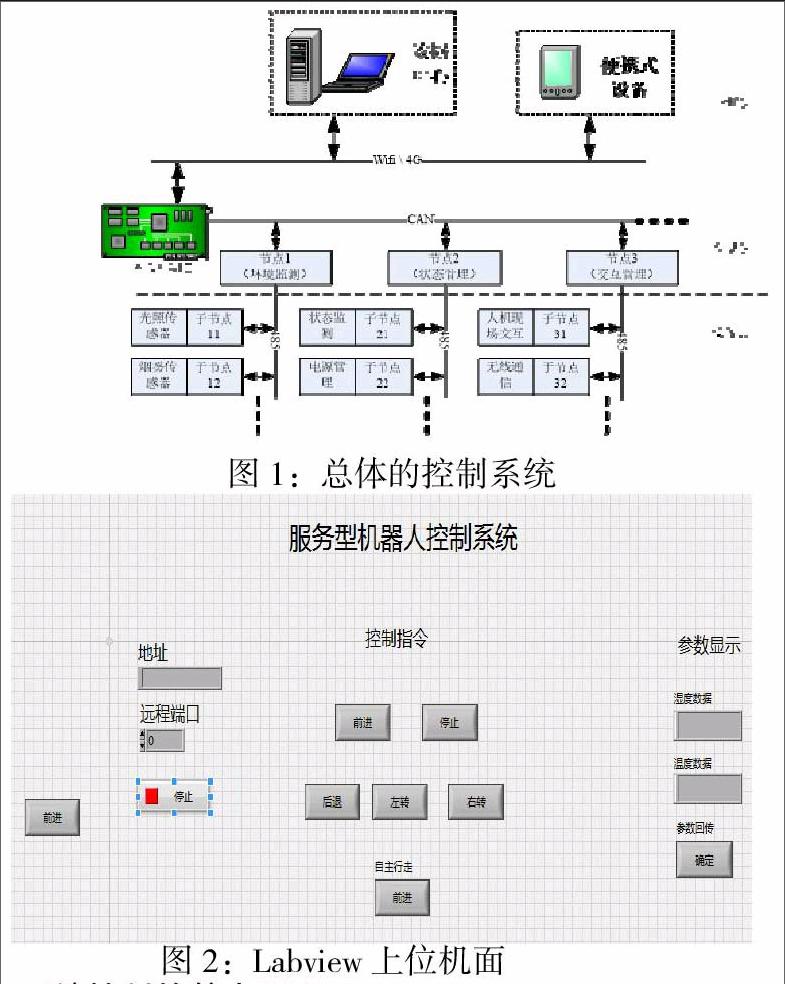
该控制系统架构采用设备、信息、控制三层总线控制模式,实现机器人控制系统功能设计,并利用相关的控制协议,分类、分级处理各种信息,满足模块化设计,简化系统结构和功能配置需求。
3.系统控制的基本原理
利用Labview上位机运用TCP/IP协议,通过局域网与主芯片进行数据传输,主芯片通过485的通讯协议对子芯片通信,实现对机器人的控制。机器人还可以检测当前环境信息,如温度、湿度等,并通过语音播报或直观的显示在该界面上。通过上位机的语音输入窗口,可以输入文字,并发送给机器人系统,使得机器人在紧急情况下可以通过控制人员的控制而说出相应的语句。在上位机的界面上有测试数据的输出窗口,可以得到下位机对上位机测试结果的反馈。
4.系统的软硬件组成
4.1硬件组成
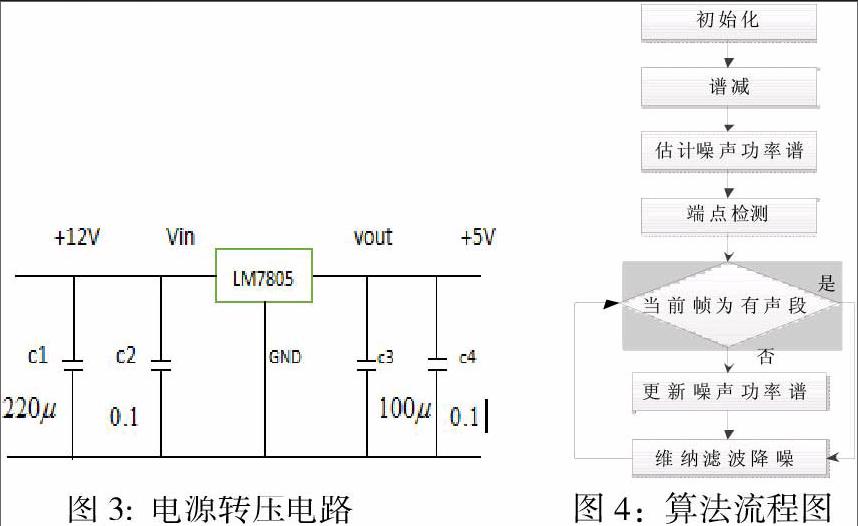
系统供电是利用12V电源通过稳压芯片LM7805转换为5V电源供电使用。按照DC/DC变换的原理来设计电路,其电路图如图3所示。
4.2软件组成
根据机器人控制原理,软件系统主要由主程序、语音辨识、电机驱动、传感器程序四部分组成。主程序进行系统初始化,包括I/O口的输入或输出设定,语音辨识运行进行语音算法处理,电机驱动负责整个机器人的运动控制,传感部分负责环境参数测量。
4.3语音识别算法
语音辨识算法是本设计的核心部分,通过对语音算法的改进,本机器人系统在人机交互功能上有明显提升,更适合服务环境的应用。以下对机器人语音辨识算法进行分析。
4.3.1改进的维纳滤波器算法
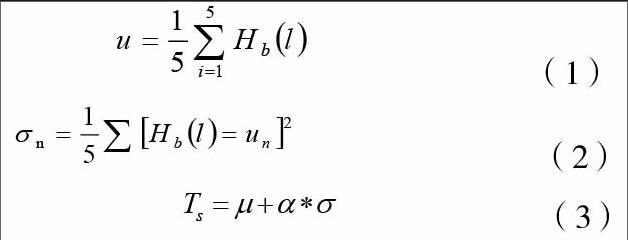
由于语音信号是随机信号,若用一个固定的噪声谱去估计先验信噪比是不合理的。为解决这一问题,本文采用基于谱嫡及先验信噪比估计的改进维纳滤波器算法,此算法对带噪语音信号通过谱墒进行端点检测,并根据检测结果对无声段的噪声功率谱进行动态更新,从而得到期望的先验信噪比,提高除噪性能。改进维纳滤波器的算法流程图如图4所示。
4.3.2算法步骤描述
(1)预处理
输入带噪语音信号,将输信号进行分帧与加窗处理,利用谱减法降低噪声,以提高输入语音信号的信噪比。在起始阶段,算出前帧信号的噪声功率谱,做为动态估算的初值。
(2)端点检测
将噪音信号利用谱墒法进行端点检测,记录语音信号有声段的起始点和结束点。该步从源头上抑制噪声对语音识别系统的干扰,降低噪声对语音信号端点检测的影响。端点检测的阈值(Ts)可以通过下面的方法获得,即:
式3中α是一个经验值,通常情况下约等于1.25。如果检测结果表明,当前的输入语音帧是在有声段,则进入图4中的步骤(3),进一步对该帧信号进行降噪处理。如果检测结果表明,当前输入语音帧处于无声段,则进入步骤(4),对该帧信号进行噪声功率谱的动态更新。
(3)维纳滤波降噪
先估算当前帧的先验信噪比,再通过公式计算维纳滤波器的增益。然后将当前帧的功率谱乘以滤波器增益。即输出降噪后的语音信号,可通过降噪后的语音信号功率谱通过傅里叶逆变换得到。
(4)噪声功率谱更新
将当前帧数据与上一帧无声片段的数据进行加权处理,即
式4中,第一项是由当前帧数据估计的噪声功率谱,并且是用于调整当前帧与前一帧功率谱加权时权重的调整因子。显然,无声片段噪声功率谱的动态更新可通过上式的加权平均实现。
5.结论
本文提出的基于网络控制的服务型机器人,在控制方法、语音辨识方面作了有益的设计和改进,更适合服务行业的特点,能更好发挥服务机器人的优势,具有巨大社会和经济价值。
参考文献:
[1].黄敦华,李勇,薛梅.校园内导游服务型自主移动机器人设计与实现[J].制造业自动化,2010,38(12).13-16
[2].刘海滨.鲁棒性语音识别的特征提取与模型自适应算法研究[D].东南大学博士学位论文,2004.
[3].徐玉华,张崇巍,徐海琴.基于激光测距仪的移动机器人新方法[J].机器人,2010,32(2).25-28
[4].杨明,王宏.基于激光雷达的移动机器人的环境建模与避障[J].清华大学学报(自然科学版),2000,40(7).117-121
[5].侴维超,卢翔,于凯妍,刘潇潇,陈守良.室内场所自主服务型机器人系统实现[J].计算机应用,2009(9):46-49.
猜你喜欢
少儿科学周刊·儿童版(2017年9期)2018-03-15
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07