
无线传感器网络中的被动式目标定位系统设计
2017-01-13 07:23唐幸儿1辉2
计算机测量与控制 2016年8期
唐幸儿1,黄 辉2
(1.江门职业技术学院电子与信息技术系,广东江门 529000;2.五邑大学信息工程学院,广东江门 529020)
无线传感器网络中的被动式目标定位系统设计
唐幸儿1,黄 辉2
(1.江门职业技术学院电子与信息技术系,广东江门 529000;2.五邑大学信息工程学院,广东江门 529020)
针对采用传统的被动式目标定位系统进行定位时,存在定位精度低的问题;设计了一种新的无线传感网络中被动式目标定位系统;无线传感网络中被动式目标定位系统主芯片CC2430、电源模块、调试模块、串口模块及复位电路模块;主芯片主要对整个系统的运行情况进行控制,电源模块为整个系统提供必要的电源,调试模块及复位模块主要是对整个系统进行调试和复位;并对被动式目标定位系统软件进行了设计;实验结果证明,设计的定位系统在定位精度方面具有一定的优越性。
无线传感网络;被动式目标;定位系统;设计
0 引言
无线传感网络(wireless sensor networks,WSN)是很多传感节点在特定范围里随机分布产生的。随着信息技术的快速发展,无线传感网络被广泛应用在军事、医疗、商业、环境、工业等领域。这些应用领域和相关系统经常需要知道被监测对象发生时间的具体位置,才能做到及时做出对应提醒和解决方案。所以,对无线传感网络中的目标进行定位是该领域亟待解决的问题,而设计一种无线传感网络中的被动式目标定位系统,是解决无线传感网络中目标定位问题最有效的方法,也具有很强的现实意义及实用价值[1]。
传统方法中,对无线传感网络中的目标进行定位时,通常采用能量波束形成方法进行定位,在信号波束聚焦过程中受到的干扰较大,定位精度不高[2 3]。对此相关文献进行了系统的改进设计,其中,文献[4]设计了一种基于自然对数变换的无线传感网络中被动式目标定位系统,通过对目标信号进行检测和滤波处理,提高定位的抗干扰性能,然后采用频域展宽检测方法实现目标信号的自主定位,然而该算法计算量大,且随着定位目标的径向运动导致定位误差增大。文献[5]设计了一种基于z域上的无线传感网络中被动式目标定位系统,将系统引起的误差经过二维扫描实现补偿,提高了定位精度,但是该方法在目标定位过程中会产生空间谱增益,导致定位目标偏离[6],定位误差较大。
针对上述问题,本文设计了一种新的无线传感网络中被动式目标定位系统。无线传感网络中被动式目标定位系统主芯片CC2430、电源模块、调试模块、串口模块及复位电路模块;主芯片主要对整个系统的运行情况进行控制,电源模块为整个系统提供必要的电源,调试模块及复位模块主要是对整个系统进行调试和复位。并对被动式目标定位系统软件进行了设计。实验结果证明,设计的定位系统在定位精度方面具有一定的优越性。
1 无线传感网络中被动式目标定位系统网络拓扑模型分析
设计的定位系统主要由ZigBee无线定位网络和上位机监控中心构成,使用4个目标参考节点、1台笔记本和1个目标盲节点建立实验平台,协调器和PC用RS232接口进行连接,其网络拓扑模型如图1所示。

图1 被动式目标定位系统网络拓扑模型
其中:目标参考节点的功能是供应一个稳定的坐标值及一个与距离有关的RSSI值;协调器的作用是负责整个无线传感网络的维护及与PC机的通信;目标盲节点的作用是接受目标参考节点的坐标、RSSI值,计算出自身的坐标位置;PC机的作用是为用户供应一个查看、管理及配置的接口。
2 被动式目标定位系统硬件设计
2.1 被动式目标定位系统硬件整体结构
整体的被动式目标定位系统主要由主芯片、电源模块、调试模块、串口模块及复位模块组成,结构如图2所示。

图2 被动式目标定位系统整体结构
2.2 复位电路模块设计
复位电路结构如图3所示。
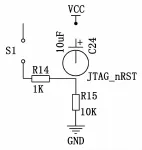
图3 复位电路模块
VCC上通电时,若松开复位键S1时,表示是电容在充电,在R15上出现电压,能使系统复位;几毫秒后电容就会充满电,R15上的电流、电压均为0,让系统快速进入工作状态;若按下复位键S1时,电容开始往外放点,JTAG-n RST直接与VCC连接,此时系统进入复位状态。
2.3 串口模块设计
新设计的系统使用串口对协调器和PC机进行连接,达到信息交互的目的。但是从串口输出的电平为CMOS电平,存在和PC机的串口电平不匹配的问题,需要另一个电平转换电路把两种电平进行匹配,则设计的串口模块如图4所示。

图4 串口模块
2.4 调试模块设计
设计的新系统采用JTAG调试电路,电路如图5所示。

图5 JTAG调试电路
通过20针标准JTAG调试口插座和CC2530进行连接,CC2530还支持SWD调试,JTAG调试需要占用5个I/O接口,用SWD调试只要有2个I/O接口即可,大大节约了I/O接口数量,在调试时主要用到调试数据SWDIO,调试时钟SWCLK和复位引脚,JTAG是低电平有效的目标复位信号,接口连接仿真器就能对主芯片进行调节。
2.5 电源模块设计
电源模块是为其它模块供应工作所需电能的主要模块,是保证系统正常工作的重要条件。由于无线传感网络中被动式目标节点存在的可移动性,使得电源使用干电池进行供电的方式。整个系统使用5 V,2 A的开关,为了维持稳定,ZigBee模块同样使用5 V电源,使用SPX1117当作稳压器把不稳定的5 V电压转化为稳定的3.3 V电压。

图6 电源模块
2.6 参考电路模块设计
参考电路使用CC2430芯片为主芯片,电路如图7所示。

图7 参考电路模块
系统外接32 MHz时钟振荡电路及32.768 k Hz时钟振荡电路。C27和C28为去耦合电容,用于滤除电源的干扰;R1、R2为偏置电阻,电容C11和能量传输线组成了平衡变压器,整个设计满足了RF输入/输出匹配电阻的要求[7]。
3 被动式目标定位系统软件设计
在无线传感网络中被动式目标定位中,需要通过对被动式目标信号进行定位,提高定位的精准度。假设在无线传感网络被动式目标定位中,目标原信号x(t)为:

对信号按照从强到弱的顺序逐个估计出目标信号分量的强度,因此可依据目标信号的调频率和目标最大的速度范围计算目标信号的固有模态函数,在变尺度压缩长度范围来确定定位的区间范围,通过时间尺度与多普勒压缩因子联合估计,得到无线传感网络中被动式目标信号自然对数自燃分解结果为:

在进行被动式目标定位过程中,对m个虚假分量rk进行目标信号还原,测试目标信号的自相关函数功率谱峰值,并与调频斜率k0的值作比较,得到GPS信号的群延迟空间波束形成满足:

其中:k为根据局部正交分解的变化得到无线传感网络中被动式目标信号的检测门限,k0为发射信号的调频斜率,假设第i个定位标定点,τi为第i个定位目标点的时延,f0为被动式目标发射信号的初始频率,由式可得目标信号定位频率和方位信息估计值为:

通过上述处理,实现了无线传感网络中被动式目标的定位,定位过程可描述为:
1)使观测信号数据X的均值为0;
2)数据白化处理,X→Z;
3)设估计分量个数为n,迭代次数k←1;
4)随机选择初始权矢量Wk;
7)令Wk=Wk/‖Wk‖;
8)假如Wk不收敛的话,进行第(5)步;
9)令k=k+1,若k≤n,进行第(4)步。
则软件实现流程如图8所示。

图8 软件实现流程图
4 仿真实验与结果分析
为了本文设计的无线传感网络中被动式目标定位系统的性能,进行仿真实验[8]。实验中首先建立系统测试平台,采用低功耗16位定点DSP构建被动式目标信号处理器,目标信号采样的时钟频率为低频1024 Hz和高频144 MHz,采用128 K× 16 Bit片选RAM进行输入输出口GPIO设计,输入信噪比为SNR=-8 dB的干扰条件下,进行无线传感网络中目标信号采集,得到信号的时域采样波形如图9所示。

图9 被动式目标信号时域采样
以上述目标信号采样结果为测试样本,进行了无线传感网络中目标信号的信号定位仿真,首先进行目标信号的抗干扰滤波预处理,采用滤波算法,得到原始目标信号解混后的输出信号如图10所示。

图10 GPS信号解混抗干扰滤波处理后的输出
然后采用群延迟空间波束形成方法进行目标信号的频谱分解和特征扫描,实现信号定位,得到无线传感网络中被动式目标信号而定位输出结果如图11所示,从图可见,采用本文算法进行无线传感网络中被动式目标信号定位,能准确反映被动式目标的位置特征和方位信息,定位精度较高,比传统方法提高了14.21%,展示了本文方法在提高定位精度中的优越性能。

图11 被动式目标信号定位输出
5 结论
本文设计的无线传感网络中被动式目标定位系统主要由主芯片CC2430、电源模块、调试模块、串口模块及复位电路模块组成;主芯片主要对整个系统的运行情况进行控制,电源模块为整个系统提供必要的电源,调试模块及复位模块主要是对整个系统进行调试和复位。并对被动式目标定位系统软件进行了设计。实验结果证明,设计的定位系统在定位精度方面具有一定的优越性。
[1]蒋华勤,李 静.基于LANDMARC的RFID室内定位算法优化[J].科技通报,2013,29(6):206-208.
[2]吕 慧,赵跃华.基于掩码的AES算法抗二阶DPA攻击方法研究[J].电子设计工程,2015,(20):31-33.
[3]张立民,闫文君,凌 青,等.一种单接收天线下的空时分组码识别方法[J].电子与信息学报,2015,37(11):2621-2627.
[4]Marey M,Dobre O A,Liao B.Classification of STBC system over frequency-selective channels[J].IEEE Transactions on Vehicular Technology,2015,64(5):2159-2164.
[5]Marey M,Dobre OA.Blind modulation classification algorithm for single and multiple-antenna systems over frequency-selective channels[J].IEEE Signal Processing Letters,2014,21(9):1098-1102.
[6]Karami E,Dobre OA.Identification of SM-OFDM and ALOFDM signals based on their second-order cyclostationarity[J].IEEE Transactions on Vehicular Technology,2015,64(3):942 -953.
[7]赵知劲,谢少萍,王海泉.OSTBC信号累积量特征分析 [J].电路与系统学报,2013,18(1):150-155.
[8]Mohammadkarimi M,Dobre OA.Blind identification of spatial multiplexing and Alamouti sp ace-time block code via Kolmogorov -Smirnov(K-S)test[J].IEEECommunications Letters,2014,18(10):1711-1714.
Optimization of GPSSignal Location Technology in Road Engineering Survey
Tang Xinger1,Huang Hui2
(1.Department of Electronic and Information Technology Jiangmen Polytechnic,Jiangmen 529000,China;2.School of Information Engineering Wuyi University,Jiangmen 529020,China)
In view of the traditional passive positioning,target positioning system has the problem of low positioning precision.We design a new system of passive target localization in wireless sensor networks.Passive target localization in wireless sensor network system is the main chip CC2430,power supply module,debugging module,serial port module and reset circuit module;Main chip is mainly to control the operation of the whole system,power supply module for the entire system to provide the necessary power,debugging module and reset module is mainly to debug and reset the whole system.And the passive targeting systems software design.The experimental results show that the design of positioning system has certain advantages in terms of positioning accuracy.
wireless sensor network;passive targets;positioning system;design
1671-4598(2016)08-0263-04
10.16526/j.cnki.11-4762/tp.2016.08.072
:TN911.7
:A
2016-05-27;
:2016-06-29。
唐幸儿(1964-),女,广东江门人,讲师,主要从事电子科学与技术方向的研究。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
老年医学研究(2021年5期)2022-01-19
建材发展导向(2021年24期)2021-02-12
电子制作(2018年23期)2018-12-26
电子制作(2018年12期)2018-08-01
江西建材(2018年2期)2018-04-14
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年19期)2017-02-02
制冷技术(2016年4期)2016-08-21
