
高精度星载点目标轨迹跟踪系统设计
2017-01-13 07:23付智红1王黎明2冰1
计算机测量与控制 2016年8期
付智红1,王黎明2,刘 冰1
(1.北京空间机电研究所,北京 100094;2.北京特种工程设计研究院,北京 100028)
高精度星载点目标轨迹跟踪系统设计
付智红1,王黎明2,刘 冰1
(1.北京空间机电研究所,北京 100094;2.北京特种工程设计研究院,北京 100028)
一种高精度星载点目标轨迹跟踪系统,利用拟合点目标轨迹曲线的方法将点目标位置数据简化成多项式系数的数据包,由地面测控系统发送至星上遥感器指向控制单元,指向控制单元与时间管理单元解析数据包中时间参数与系数参数,控制指向镜机构进行运动,对点目标轨迹进行自主跟踪;此方法提高了跟踪系统的跟踪精度,减轻了目标跟踪时总线通信压力;经过试验验证,系统的跟踪精度远优于传统的目标跟踪方法,可进行推广使用。
高精度;点目标轨迹跟踪;系统设计
0 引言
星载遥感器在随卫星飞行时采用推扫或凝视方式对景物目标的进行成像。在一些特定场合、特定用途,星载遥感器需要获得运动目标的数据,这些运动目标多为点目标。对预知的点目标进行跟踪成像,即事先知道点目标的运动轨迹,对其进行跟踪成像,需保证点目标在整个跟踪轨迹段均出现在星载遥感器有效视场内。影响点目标轨迹跟踪精度的因素主要有时间跟踪误差因素和角度跟踪误差因素。
本文将针对影响点目标轨迹跟踪精度的主要因素进行分析,设计一种新的星载点目标轨迹跟踪系统及方法。
1 现有技术及误差分析
现有技术点目标轨迹跟踪方法:卫星地面测控系统将包含点目标运动轨迹逐点位置信息的数据以指令形式依次上传至卫星,卫星通过侧摆来逐点调整星载遥感相机的视轴,保证点目标落在相机有效成像范围内,从而实现对点目标的连续跟踪;此方法依赖于卫星的侧摆,点目标的跟踪误差主要包括卫星侧摆误差和时统误差;通常卫星姿态控制系统的侧摆控制精度能达到0.5°(3δ),时统误差通常在500 ms,由该时间差导致的跟踪误差为0.05°,跟踪总误差为两种误差均方根合成,即总,得出总跟踪误差为0.5025°。由计算结果可见此方法跟踪精度主要由卫星侧摆精度决定。此外,完成点目标的轨迹跟踪需要上传大量的位置信息,长时间占用总线资源,给数据管理带来较大压力。

表1 点目标跟踪误差汇总
若遥感器视场角小于1°,通常要求跟踪误差小于1/3视场角,即为0.3°,上述方法将不能满足使用要求,因此,需对跟踪系统方案进行优化设计,以适应较小视场角的遥感器。
2 点目标轨迹跟踪系统
根据对现有技术的分析,点目标轨迹跟踪误差中以卫星侧摆的精度误差为最大,而通常星载遥感器指向镜的指向精度可以达到0.03°(3δ),因此设计一种新的点目标轨迹跟踪系统,卫星平台姿态稳定,不需要卫星平台参与侧摆,以相机指向镜为主要摆动机构,对点目标轨迹进行跟踪;同时采用曲线拟合法将逐点位置信息拟合成多项式,仅将多项式系数作为数据包内容通过总线上传至相机,相机进行自主连续轨迹跟踪,极大地减少了上传数据数量,减少总线通信压力。星上点目标轨迹跟踪系统包括:时间管理单元、指向控制单元、指向镜电机机构。系统工作原理如图1所示。

图1 点目标轨迹跟踪系统组成框图
点目标轨迹的运动通常为一段时间之内目标点的位置连续变化,映射到遥感器内,即为一段时间之内遥感器视轴的连续角度变化。点目标轨迹跟踪系统的功能即为在目标运动周期内控制遥感器指向镜以目标轨迹反射的角度连续转动。系统跟踪的原理如图2所示。

图2 相机对点目标轨迹跟踪原理
首先将预知点目标的运动轨迹所对应的视轴变化轨迹,拟合成指向镜电机机构的角度跟踪曲线;通常指向系统为二维度控制系统,由俯仰向、滚动向两个轴系组成。将指向镜电机机构的角度跟踪曲线分解为俯仰向跟踪曲线和滚动向跟踪曲线,其中,俯仰向跟踪曲线、滚动向跟踪曲线均以时间为变量,角度为参变量;点目标的运动轨迹对应的视轴角度与指向镜电机机构俯仰向角度、滚动向角度之间的具体转换方法如图3所示。

图3 坐标转换关系
假定XYZO为卫星所在的轨道坐标系(卫星惯性坐标系),首先将点目标运动轨迹在YOZ面上投影,得到点目标运动轨迹与投影之间的夹角并作为对应于卫星本体坐标系的俯仰角α。其中,如果点目标运动轨迹位于+X轴,则其对应的俯仰角α为正;如果点目标运动轨迹位于-X轴,则其对应的俯仰角α为为负。然后将点目标运动轨迹在轨道坐标系XOZ面上投影,得到点目标运动轨迹与投影之间的夹角并作为对应于卫星本体坐标系滚动角β。其中,如果点目标运动轨迹位于+Y轴,则其对应的滚动角β为负;如果点目标运动轨迹位于-Y,则其对应的滚动角β为正。最后将得到的对应卫星本体坐标系的俯仰角α、滚动角β转换成指向镜电机机构跟踪曲线的俯仰角α指向镜和滚动角β指向镜,α指向镜=。
为了提高跟踪精度,可以采用全局寻优的方法找出跟踪曲线分段点,将一条跟踪曲线分为多段,后段曲线的起始角度即为前一段曲线的终止角度。将曲线分段,是为了让拟合出的高次多项式更加逼近点目标的实际运动轨迹,其中,具体分段方法可以采用“寻找零点法”,即对曲线各点求二次导,将得出“零点”即作为分段位置点,进而得到一个较为逼近点目标实际运动轨迹的分段高次多项式。
通过上述方法得出以时间为变量、角度为参变量的代表俯仰向曲线方程和滚动向曲线方程高次多项式;然后提取代表预知点目标轨迹的俯仰向曲线方程和滚动向曲线方程的高次多项式的系数,并与曲线跟踪起始时间、曲线跟踪结束时间打包形成预知点目标运动轨迹的参数数据包;通过卫星数据管理单元将包含曲线方程多项式系数、曲线跟踪起始时间和曲线跟踪结束时间的预知点目标运动轨迹的参数数据包发送给轨迹跟踪系统的时间管理单元。其中,曲线方程为俯仰向、滚动向角度关于时间的多项式,即俯仰向曲线方程和滚动向曲线方程。
下面以拟合成三段的三次曲线为例说明多项式形式及参数数据包内容:

提取各段曲线的多项式系数以及各段曲线的起始结束时间(每一段曲线的跟踪起始时间即为上一段跟踪结束时间)作为参数数据包的内容,数据包详细内容见表2。
时间管理单元,接收地面测控系统发送的预知点目标运动轨迹的参数数据包后,提取参数数据包中的跟踪起始时间t0、跟踪结束时间tend后将参数数据包转发给指向控制单元,并以收到的卫星星务时间作为基准开始计时,当计时至曲线跟踪起始时间t0后控制指向控制单元开始启动跟踪控制,当计时至跟踪结束时间tend时控制指向控制单元结束跟踪控制。

表2 曲线参数数据包
指向控制单元,接收到参数数据包后进行解析并计算,即根据曲线多项式系数还原俯仰向曲线方程和滚动向曲线方程,计算出指向镜电机结构跟踪的初始俯仰向、滚动向的角度位置后产生功率驱动信号,控制指向镜电机伺服到初始俯仰向、滚动向的角度位置;将曲线跟踪起始时间和曲线跟踪结束时间之间的时间长度均分成m份,每份对应的时间长度作为指向控制单元的控制周期△t,根据俯仰向曲线方程和滚动向曲线方程,计算出每个控制周期的起始时刻指向镜电机需要伺服到的俯仰向、滚动向的角度位置,形成跟踪角度查找表,并进而得到如图4所示的跟踪曲线(或跟踪曲线及其分段),以备曲线跟踪时查找;当时间管理单元计时到曲线跟踪起始时间t0时,启动跟踪控制,依照跟踪角度查找表及设定的控制周期产生功率驱动信号,对指向镜电机机构进行伺服控制(即在每个控制周期的起始时刻将指向镜电机机构伺服到对应的俯仰向、滚动向的角度位置),直至曲线跟踪结束时间tend停止;其中,指向控制单元的控制周期△t应小于遥感相机每帧图像的成像周期,同时根据目标跟踪精度的要求在系统计算及存储资源允许的情况尽量取小。
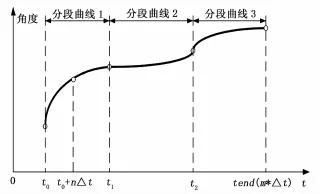
图4 分段曲线(以俯仰向为例)
针对系统设计,进行误差分析;新的点目标轨迹跟踪系统误差主要包括3个因素:指向镜跟踪误差、拟合算法误差和时统误差。指向镜跟踪误差能够达到0.03°(3δ),时统误差在0.05°,曲线拟合算法误差根据仿真分析,三次拟合的标准差在0.02°。
根据误差分析,点目标轨迹跟踪系统的误差预期在0.06°,能够满足小视场遥感器跟踪精度0.3°。
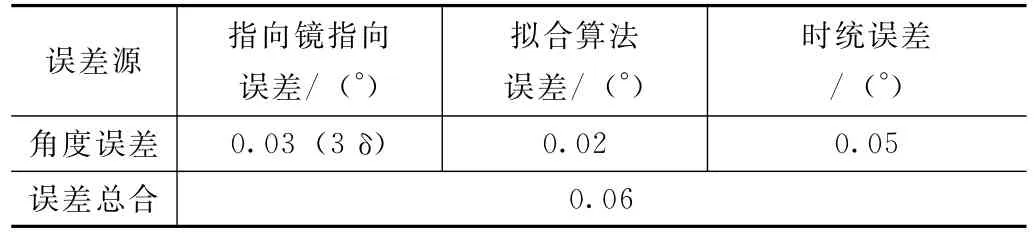
表3 系统跟踪误差
3 系统验证
为了验证点目标跟踪系统在轨跟踪精度,需要搭建一套测试系统对点目标轨迹曲线跟踪精度进行测试。测试系统包含:测控计算机、指向控制单元、二维指向镜机构、曲线跟踪采集系统和数据接收计算机等。测试系统连接方式如图5所示。由测控计算机发送拟合好的曲线跟踪参数数据包和星务时间给指向控制单元,指向控制单元驱动二维指向镜机构转动,带动指向镜转动进行曲线跟踪。理论曲线参数和实时角度均发送给曲线跟踪采集模块,数据由数据接收计算机收集后在同一个时间轴上画出理论曲线和实际曲线,用于比较曲线跟踪精度和时延。
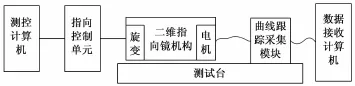
图5 测试系统连接方式
数据接收计算机在同一个时间轴上画出理论曲线和实际曲线,如图6所示。
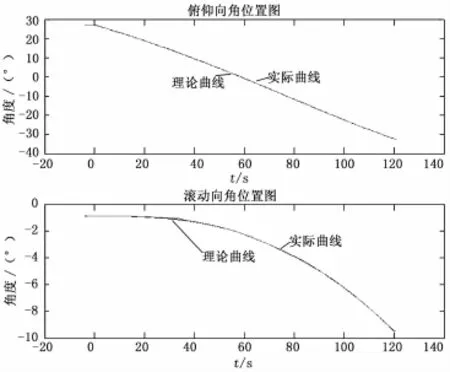
图6 理论曲线与实际跟踪曲线对比
对实际跟踪曲线数据进行分析,得出指向镜机构俯仰向、滚动向两个方向的跟踪精度误差。滚动向曲线跟踪误差如图7所示(纵轴为理论曲线和实际曲线的差),误差最大值为0.034°。
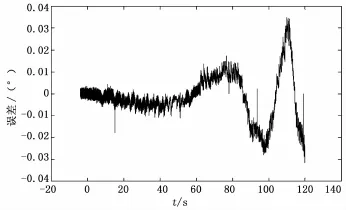
图7 滚动轴曲线跟踪误差曲线
俯仰向曲线跟踪误差如图8所示(纵轴为理论曲线和实际曲线的差),误差最大值为0.088°。
滚动向和俯仰向的曲线跟踪精度如表4所示。
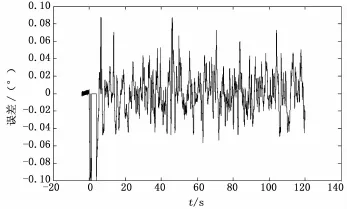
图8 俯仰轴曲线跟踪误差曲线

表4 曲线跟踪误差统计
从测试结果来看,曲线实际跟踪误差远优于0.3°的指标要求,能够实现星上点目标轨迹跟踪的要求。
4 结论
本系统与现有技术的相比,不需要通过卫星侧摆,遥感器就能自动实现对点目标运动轨迹的连续跟踪;使用指向镜电机机构控制遥感器进行跟踪,转动惯量更小、控制精度更高,提高了跟踪系统的跟踪精度;不需要连续上传多条角度指令至遥感器,只需要将时间参数和多项式系数数据作为数据包传输,即可控制遥感器完成对点目标运动轨迹的连续跟踪,通信效率高,减少了跟踪系统的存储压力。本系统控制方法简单、准确、高效、适用面广泛,能够适用于多种对预知点目标进行跟踪的星载遥感器。
[1]赵 延,姚康泽,孙俊华,等.导弹预警卫星目标识别算法研究[J].系统工程与电子技术,2005,27(10):1811-1813.
[2]庞国瑞,葛广英,田存伟.基于PSO算法的运动目标跟踪研究[J].单片机与嵌入式系统应用,2013 13(6):1-4.
[3]高 升,袁宝峰,齐 哲,等.基于稀疏直方图的空间机械臂视觉目标跟踪方法[J].航天返回与遥感,2015(3):92-98.
Design of High Precision Space-borne Point-target Trajectory Tracking System
Fu Zhihong1,Wang Liming2,Liu Bing1
(1.Beijing Institute of Mechanics&Electricity,Beijing 100094,China;2.Beijing Special Engineering Design and Research Institute,Beijing 100028,China)
High precision space-borne Point-targer trajectory tracking system,the point target position is simplified into a data packet with polynomial coefficients,which is sent to the satellite remote sensor pointing control unit from the ground control system.The pointing control unit and time management unit analysis time parameter and coefficient parameter in data packet,and control pointing mirror mechanism for motion,autonomous tracking point target trajectory.This method improves the tracking accuracy of the tracking system,reduce the pressure of bus communication.The tracking accuracy of the system is much better than that of the traditional target tracking method.
high precision;Point-targer trajectory tracking;system design
1671-4598(2016)08-0252-03
10.16526/j.cnki.11-4762/tp.2016.08.069
:V443+.5
:A
2016-05-23;
:2016-07-04。
付智红(1982-),女,江西吉安人,硕士,工程师,主要从事卫星有效载荷遥感器电子学系统设计工作。
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
电脑与电信(2021年9期)2021-12-21
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
网络安全和信息化(2018年4期)2018-11-09
现代装饰(2018年5期)2018-05-26
传媒评论(2017年8期)2017-11-08
中国三峡(2017年2期)2017-06-09
