
真实场景下模拟器卫星可见性研究
2017-01-13 07:23沈海鸿1马楠楠1波2凯1
计算机测量与控制 2016年8期
沈海鸿1,马楠楠1,张 波2,吴 凯1
(1.中国地质大学(北京)信息工程学院,北京 100083;2.北京航空航天大学电子信息工程学院,北京 100191)
真实场景下模拟器卫星可见性研究
沈海鸿1,马楠楠1,张 波2,吴 凯1
(1.中国地质大学(北京)信息工程学院,北京 100083;2.北京航空航天大学电子信息工程学院,北京 100191)
随着信号模拟器的发展,载体的运动模型越来越复杂,给出了一种在真实复杂的场景下载体自驾车行驶的过程中卫星可见性判断的方法;利用Global Mapper软件处理网上下载的数字高程信息,提取真实场景中的山脉等障碍物的位置和高度信息;载体行驶过程中,地图API会结合实际路况和真实的地形地貌状况规划出一条合理的自驾车行驶路线;针对载体不断运动过程中的每个位置,实时的计算山脉等障碍物和卫星相对载体的仰角,判断载体每个位置上该卫星是否可见;通过比较考虑地形地貌因素和不考虑地形地貌因素两种实验条件下,对比障碍物和卫星相对于载体的仰角大小,模拟器求解出可见卫星数量变化,用实验结果分析并验证了研究方法的正确性。
Global Mapper;地图API;仰角;卫星可见性
0 引言
随着社会、经济的快速发展,用户在出行时往往选择自驾车,自由方便快捷,于是对卫星导航定位的要求越来越高,尤其是在特殊的地形下,用户从视线良好的平原地区驾车到狭隘的多山峰地区,能否接收到卫星信号对用户进行定位以及定位的精度显得尤其重要。
当用户自驾车启用地图导航时,从出发点到终点站,导航软件会根据真实具体的交通路况合理的选择行驶路线,比如说从平坦的地区自驾车到多山峰崎岖的山区,驾车行驶过程中卫星信号可能会受到周围的山脉等高大障碍物的遮挡而无法被用户接收,失去导航定位的功能,用户应该避免走这样的路线或者绕道而行,所以研究用户在真实复杂的场景下自驾车行驶过程中实时地判断导航卫星的可见性很有必要。
1 地图API
现在地图API功能强大,为用户提供了驾车导航、实时路况查询等丰富的功能,给用户提供最适合的路线规划。在本文中,用JavaScript语言和HTML语言一起编写了地图的自驾车查询功能,并且描绘出用户的驾车行驶路线并记录下轨迹点集,方便后文计算仰角。文章中选取的区域是北京房山区白草畔风景区,起点是用经纬度设置的P1=Point(115.640 0,39.768 550),对应的是北京房山区杨树洼位置,终点位置设置的是白草畔风景区P2=Point(115.640 8,39.780 885),当然也可以直接输入起止点的名字,根据起止点位置搜索出最合理最节省时间的行驶路径,并给出预计到达时长,记录路径上的各个轨迹点。具体的效果如图1所示。
如上图所示,根据起止点位置,点击开始按钮后,软件搜索到最合理最节省时间的行驶路径并用蓝色粗线标记出来,并且会弹出预计时长和总路线长度等信息,驾车轨迹点集合用新弹出的窗口来保存,效果图如图2和图3所示。

图1 地图API整体效果图

图2 总路程和行驶时间 图3 行驶轨迹点集合
2 求解卫星和障碍物的仰角
卫星发射的信号能否被用户接收,与卫星和障碍物相对接收机的仰角大小有关。根据地图API规划好的用户行驶路径并记录下途径各点的位置,求解每个用户位置上的对应的卫星和障碍物的仰角大小。
2.1 求解卫星相对用户的仰角
可见卫星的判断需要借助于用户与卫星之间的仰角进行判断。仰角、方位角的计算[1]如图4所示,其中E表示仰角,Az表示方位角。

图4 卫星仰角、方位角示意图
卫星仰角、方位角的计算公式如下:
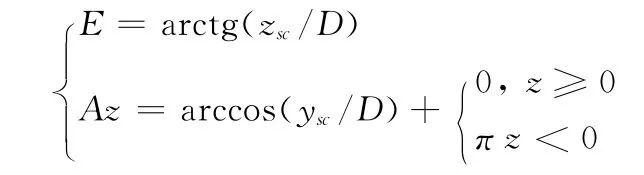
式中,(xsc,ysc,zsc)为卫星的坐标,。
在求解仰角和方位角时,需要先求解出卫星的位置。根据ICD文件的规定,可见卫星位置计算算法为通用算法[2],这里不做详细介绍。
2.2 求解障碍物相对用户的仰角
为更好地说明高大的障碍物可以对卫星信号进行遮挡阻拦,在本文中障碍物选取的是北京房山区白草畔风景区附近的部分山脉。用Global Mapper软件提取山区的数字高程信息(Digital Elevation Model),简称DEM,是用一组有序数值阵列形式表示地面高程的一种实体地面模型,图5为DEM模型。
根据DEM模型提取出的经度纬度高度等3维信息,输出保存到本地文件。用Matlab软件对输出的数字高程模型信息进行地形仿真,仿真结果如图6所示。
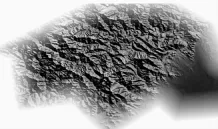
图5 房山区部分数字高程模型图
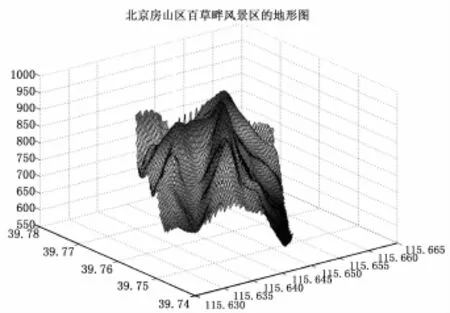
图6 白草畔风景区地形仿真图
如图6所示,整体海波在800 m左右,有几个凸起的峰尖,最高峰大约在950 m。上面的地形图反映的地形起伏状态和实际情况大约一致。
得到有效的数据后,开始求解障碍物相对于用户的仰角。根据地图上用户动态行驶路径的点集,求解出每个用户位置下障碍物相对于用户的仰角。
首先读取用户运动轨迹信息和山体障碍物的信息,求出在给定某一方位角AZ方向下的山体障碍物相对用户的仰角。因为提取的DEM数据是3维离散信息,在某方向角AZ下并不是所有的点的位置信息已知,要用附近点插值来求解AZ方向上的点集。具体的流程如图7所示。
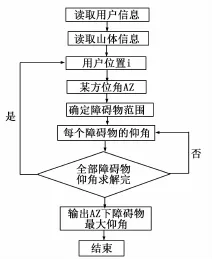
图7 障碍物仰角计算流程图
3 判断卫星可见性
经过上面的计算可以求解出各个用户位置下卫星和山体障碍物的仰角,通过比较同一方向角AZ下卫星和障碍物的仰角大小,只有当卫星信号的最小仰角大于障碍物的最大仰角时,卫星发射的信号才能被用户接收,这颗卫星才具有可见性。判断卫星是否可见如图8所示。

图8 判断卫星可见性示意图
图8中左侧部分表示山体障碍物,仰角min表示用户能够接收到的GPS卫星信号的最低仰角。从图中看出,复杂真实的场景下卫星可见性的判断必须结合当地的DEM数据,计算周围障碍物相对于用户的仰角。只有当卫星的仰角E>Emin,且有E>50,则该颗卫星可见,否则就判断为不可见。由于DEM数据是离散的,需要计算出该卫星相对于接收机的仰角E和方位角AZ,利用附近点插值法求出AZ方向上各个点相对于接收机的仰角Eh,并求出仰角Eh的最大值Eh_Max,当卫星仰角E>50且E>Eh_Max,该颗卫星具有可见性。
4 卫星可见性的测试与分析
为验证复杂场景下卫星可见性的方法正确性,分别进行地形状态测试,驾车行驶路径测试和卫星可见性测试。首先要测试仿真出的地形状态和真实的地形状态是否一致,确保网上提取的山区地形DEM数据的正确性,其次通过比较网上地图搜索获取的行驶路径和文中采取的方法求解的行驶轨迹路径,验证该方法符合真实场景下的驾车行驶路径,最后用是否考虑地形情况的可见卫星的数量变化来说明复杂地形对卫星可见性的影响。
4.1 地形状态测试
用DEM生成的数据仿真出的地形图和房山区百草畔风景区真实地形图对比,验证获取的DEM数据是可靠有效的,为下文进一步分析山区障碍物数据提供依据。图9为山区真实地形图。

图9 白草畔风景区的真实地形图
通过比较上面的图6和图9可以发现用DEM数据仿真的地形图大致描述了真实地形的起伏状态,由于网上下载的DEM数据精度有限,不能很精确的描述地形细致的变化[3]。
4.2 驾车行驶路径测试
在网上利用起止点来搜索驾车行驶路径,起点输入北京房山区杨树洼,终点输入白草畔风景区,搜索结果如下图10所示。采取文中的方法求解的驾车行驶路径如图11所示。

图10 网上搜索行驶路

图11 驾车行驶路径测试
结合仿真出的三维地形图,在地形图上驾车行驶路径如图12所示,A点是其中的一个小山峰。

图12 载体运动轨迹
自驾车整个行驶过程用4分钟,速度大小变化如图13所示。
通过对比图10和图11可以发现两者的行驶路径几乎相同,验证了文中行驶路径方法的正确性;图12是载体在白草畔风景区行驶的运动轨迹三维示意图,更加直观,一目了然。图13描述了行驶过程中的速度变化,可以看出行驶的平均速度大约在13 m/s,在起点和终点附近速度较高,在某些高峰区域速度较低,在5 m/s左右,符合实际情况

图13 自驾车行驶速度
4.3 卫星可见性测试
载体按照地图API规划好的路线从起点行驶到终点,整个行驶过程具体情况较为复杂,为更直观地说明问题,分别在考虑障碍物遮挡以及不考虑障碍物遮挡的情况下,比较同一方向角下卫星和障碍物的仰角大小来判断卫星的可见性[4]。设开始仿真时间是2016年1月4日12时00分00秒,载体大约行驶在图12中山峰A点处,用模拟器来观测可见星的数量变化来验证地表障碍物对卫星可见性产生的影响,如图14和图15所示。

图14 未考虑障碍物遮挡下可见卫星的数量
通过比较图14和图15中的数据,可以明显发现,同一仿真时刻,相同的仿真参数下,在A点前后,图14中未考虑地形障碍物遮挡可见星数量为10颗,图15考虑了地形障碍物的遮挡因素[5]可见星数量减为8颗,减少的GPS 4号星和7号星由于卫星的仰角较低,小于周围障碍物的仰角,卫星发出的导航信号被山体等障碍物所遮挡,无法被接收机接收。载体在整个行驶过程中可见的卫星数量变化如图16所示。
图16表明,在山体等障碍物高度较低时,障碍物的仰角较小,小于卫星的仰角,此时卫星是可见的,可见的卫星数是10颗。随着山体高度的增加,障碍物的仰角随之增大,当大于卫星的仰角时,此颗卫星信号传播中被障碍物遮挡不可见,可见的卫星数量逐渐减少。图中的最高峰大约在A点处,对应的可见卫星数量最少。
由此可见,用户载体在真实复杂的场景下行驶有必要考虑附近地形障碍物对卫星可见性的影响,还有通过文中的方法可以有效地判断在复杂场景下卫星的可见性。
图15 考虑障碍物遮挡下可见星数量

图16 载体行驶过程中可见星数量变化
5 结论
本文详细介绍了真实场景下自驾车行驶过程中卫星可见性的判断方法,包括地图API、仰角计算、地形仿真、可见性判断等模块的设计方案,给出了具体实现流程图。该方法中的驾车行驶路线和可见星的数量与实地测试结果保持一致,验证了方法的可行性。但是网上下载的地形DEM数据精度有限和地图规划路线精度不高等因素,对可见卫星的判断精度有待提高。
[1]穆 雪.GPS模拟器若干参数对接收机定位精度的影响分析[D].北京:北京航空航天大学,2015.
[2]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[3]龚健雅.地理信息系统基础[M].北京:科学出版社,2001.
[4]都欣欣.GNSS信号模拟器导航电文及状态参数产生方法的研究与实现[D].北京:北京航空航天大学,2006.
[5]陈荣超,陈光武.基于BDS/GPS和百度地图的现代有轨电车监控系统的设计[J].计算机测量与控制,2015,23(10):49.
Research on Satellite Visibility in Signal Simulator under the Condition of Real Scene
Shen Haihong1,Ma Nannan1,Zhang Bo2,Wu Kai1
(1.School of Information Engineering,China University of Geosciences(Beijing),BeiJing 100083,China;2.School of Electronic Information Engineering,Beijing University of Aeronautics and Astronautics,BeiJing 100191,China)
With the development of the signal simulator,the motion model of vehicle is more and more complicated.This paper introduces a satellite visibility judgment method when carrier is driving in a real complex scene.Global Mapper software handles download digital elevation information online,in order to obstacle the position and height information of mountains.In the process of vehicle driving,maps API will plan out a reasonable driving route combining with the actual road conditions and real landform condition.Given each position of Carrier in the process of constant motion,the method gives a real-time calculation of mountains and satellite elevation relative carrier,and judges the satellite is visible or not.The simulator figures out the counts of the visible satellite by comparing the elevations in the two experimental conditions of considering landform factors and not considering topography factors.The paper analysizes and verifies the validity of the research methods with the experiment results.
global mapper;map API;elevation;satellite visibility
1671-4598(2016)08-0193-04
10.16526/j.cnki.11-4762/tp.2016.08.052
:TN911.7
:A
2016-01-19;
:2016-03-23。
教育部留学基金委青年骨干教师项目(201406405014);教育部基本科研业务启动项目(2-9-2013-083)。
沈海鸿(1970-),女,黑龙江人,副教授,硕士生导师,主要从事信号与信息处理方向的研究。
猜你喜欢
环球时报(2022-03-05)2022-03-05
动漫界·幼教365(中班)(2020年3期)2020-04-20
初中生世界·九年级(2020年2期)2020-04-10
铁道通信信号(2020年9期)2020-02-06
科学导报·学术(2018年23期)2018-10-21
东西南北(2018年22期)2018-01-14
分忧(2017年8期)2017-08-03
科技视界(2016年15期)2016-06-30
城市道桥与防洪(2014年5期)2014-02-27
红领巾·成长(2009年8期)2009-01-12
