
基于红外的非接触式手势识别系统设计
2017-01-12 21:56杨晋芳卫建华刘琪齐攀
物联网技术 2016年11期
杨晋芳++卫建华++刘琪++齐攀

摘 要:针对目前电子设备对手势识别功能的需求,提出了一种非接触式手势识别系统设计方案。该系统将红外线和环境光传感器Si1143与C8051F700、C8051F800等电容式触摸感应微控制器相结合,实现非接触式手势识别,可用于多种动作和手势检测以及目标物体距离校准。
关键词:手势识别;非接触;红外;传感器
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2016)11-0-03
0 引 言
人机交互技术的发展大大增强了应用系统的智能化设计[1],手势识别[2]也逐渐成为人机交互的核心技术。随着人机界面技术和设计理念的进步,红外线接近感应器正逐渐成为非接触式手势识别用户界面的创新点。早期的传统红外线接近感应系统由老式光电探测器和光电断路器组成,其触发方式基于是否移动或中断,但这些器件在应用方面受感应器尺寸、功耗和可配置性的限制[3-7]。相比于这些早期的红外线接近传感器,Silicon Labs的Si1143传感器不仅体积更小、功耗更低,还可以驱动多个红外线发光二极管,可实现高级的多维手势输入功能。本文结合面向人机界面应用的Si1143传感器的优势,给出了一种非接触式手势识别系统的设计方案。该方案支持两个和三个LED实现更复杂的接近传感器集成电路,使人们能够更方便、更安全、更愉快的通过非接触手势识别用户界面。
1 Si1143的基本特性
Si1143是基于反射的低功率红外线临近和环境光传感器,其结构框图如图1所示。它包括ADC转换器、可见光光电二极管、红外线光电二极管、数字信号处理器以及集成的红外线LED驱动器等。工作时LED发送红外光被物理反射回来后,由可吸收波长850880 nm的红外光电二极管接收,而环境光则由可接收波长在500600 nm范围内的可见光光电二极管接收,然后转化为电信号经AMUX送入ADC进行数据转换,进而通过I2C总线将数据传输至控制器。接近传感器的检测距离和灵敏度由系统的信噪比(SNR)决定,SNR越高,距离越远。多种可变因素影响系统的SNR,包括环境噪声/光线补偿、光电二极管灵敏度、滤波和模数转换器(ADC)架构[8]。Si1143的联合架构优化具有非常高的系统SNR,从而使Si1143接近传感器具有较远的感应距离、较高的灵敏度和较快的数据采集速度。
Si1143在广泛的动态范围和包括阳光直射在内的各种光源下可提供优异性能,高灵敏度支持在半透明的产品覆盖物后面灵活放置红外传感器。光电二极管响应和关联的数字转换电路对人造光闪烁噪声和自然光颤动噪声具有优异的抗扰性。Si1143完备的IR感应架构也可在日光下工作[9],其包含一个环境光传感器,能够感应高达128 kiloLux的光照度。此外,Si1143的先进架构能够在25 s内完成接近感应测量,减少了极其耗电的红外发光二极管的开启时间,从而实现了低功耗。
Si1143包括最多3个红外线LED驱动器,可以自由实现检测距离超过50 cm的一维HI系统或检测距离高达15 cm的具有手势感应能力的多维系统。多个红外线LED灯驱动器能够实现高级动作和手势感应,Si1143支持3个LED驱动,支持多轴式临近运动探测,能够在多维非接触式控制中实现创新的三维动作感应[10]。
2 非接触式手势识别系统组成
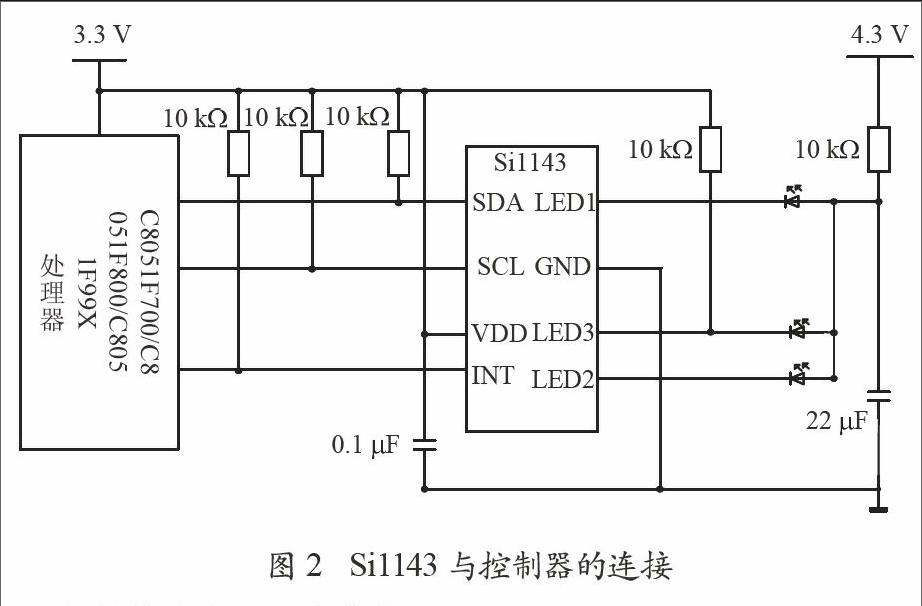
图2所示为Si1143与控制器的连接电路示意图。Si1143可与Silicon Labs提供的多种电容式触摸感应微控制器相结合,包括C8051F700、C8051F800或C8051F99x处理器,组成非接触式的手势识别系统,并能用于多种动作和手势检测,以及目标物体距离校准应用。Si1143器件的感应模式提供有用信息给MCU,用以确定背景光类型,如日光、荧光灯光或白炽灯光。这种信息具有广泛应用,可改善IR接近感应、优化红外感应功耗、增强显示设备的背景亮度调节功能以及控制系统内的其他设备。
3 红外技术实现手势感应
Si1143接近环境光传感器适用于非接触式手势感应,如读者翻页,滚动平板电脑或GUI导航。Si1143可提供高达三个LED驱动器,并可在715 cm产品互动区域内感知手势。我们通过使用红外线技术实现动作感应,主要采用基于位置和基于相位的手势感应。
(1)基于位置的手势感应通过计算对象的位置来实现手势感应。
(2)基于相位的手势检测则通过定时信号的变化来判断物体的运动方向。
3.1 基于位置的手势感应
基于位置的运动传感算法涉及三个主要步骤:
(1)将原始数据输入转换成可用的距离数据,
(2)使用距离数据来估计目标对象的位置,
(3)检查位置数据移动的定时,以查看是否有手势出现。
3.2 基于相位的手势感应
基于相位的手势感应包括从原始数据寻找邻近测量和寻找每个LED的定时变化反馈。当手放在LED的正上方,将出现每个LED的最大反馈点。如果手扫过两个LED,可以通过查看其LED首次出现的反馈来确定划过的方向。
3.3 两方法优缺点比较
基于位置方法的优点是可以提供目标的位置信息,并允许系统实现比例控制。基于位置方法的主要缺点是位置计算的精度。位置算法假定LED是球形输出,但在实际应用中LED的输出是圆锥形。该方法还假定LED的整个输出是均匀光强,但实际情况中光强度会衰减。且该方法不考虑目标的形状,一个独特形状的对象会导致位置输出不一致。例如该系统区别不出手和手腕之间的差异,因此涉及该手腕运动的区域检测则不太精确。该方法中提供的位置信息用于低分辨率系统是足够的,但当前的定位算法并不太适合于定点应用。
对于不需要位置信息的应用,基于相位的方法提供了一个非常可靠的方法检测手势。每个手势可以在可检测区域任一入口或出口进行检测,该方法的缺点是不能提供位置信息。这意味着可以实现手势的数量比以位置为基础的方法更有限。相位法只能从检测区域区别出进入和退出的方向,无法检测到可检测区域中的任何运动。
3.4 两方法结合提高手势识别
系统将两种方法结合,弥补了彼此的缺陷。基于位置的方法可提供某些位置信息进行比例控制,基于相位的方法可以用于检测大多数的手势。这两种方法配合使用,可以给手势感应提供强大的解决方案。
4 系统软硬件设计相关
4.1 临近感应
Si1143可以驱动三个单独的红外线LED。将这三个红外线LED放入L形配置中时,可以对三维临近场地内的物体进行三角测量。每当到PS测量时,Si1143会进行多达三次测量,具体依据CHLIST中启用的参数而定。也可以修改这些测量的ADC参数,允许在不同环境光条件下正常运行。在这三次测量中,都可以对LED选择进行设定。在默认情况下,每次测量打开一个LED驱动器,但容易颠倒测量顺序,或让所有LED同时打开。根据情况,可以将每次临近测量值与主机设定的阈值进行比较。
为了动态支持不同的电源使用效率情形,每个输出的红外线LED电流都可以独立设定,可在几毫安到几百毫安之间任意取值,因此主机可以动态地临近探测性能或节能优化。此功能允许主机在一个物体已进入临近范围后降低LED电流,并在采用较低电流设置时仍然可以跟踪该物体。最后通过灵活的电流设置,采用受控制的电流吸收器控制红外线LED电流,从而提高精确度。
4.2 环境光
Si11413具有能够同时测量可见光和红外光的光电二极管,但可见光光电二极管也受红外光影响。测量照明度时需要与人眼相同的光谱响应。如果需要准确测量照明度,则必须补偿可见光光电二极管的额外IR响应。为了让主控制器可以对红外光的影响进行校正,Si1143在单独通道报告红外光的测量结果。单独的可见光光电二极管和IR光电二极管适合于各种算法解决方案。主控制器可以执行两次测量,运行算法推导出与人眼感觉相当的照明度。在主机中运行IR校正算法可以非常灵活地调节系统相关变量。如果在系统中使用的玻璃阻止的可见光超过红外光,则需要调节IR校正。如果主机没有进行任何红外线校正,则可以在CHLIST参数中关闭红外线测量。
4.3 主控制器接口
Si1143的主控制器接口由SCL、SDA及INT三个引脚组成,设计INT、SCL和SDA引脚的目的是使Si1143通过软件命令进入关闭模式,而不会干扰总线上其他I2C器件的正常运行。Si1143的I2C从地址是0x5A,可响应全局地址(0x00)和全局复位命令(0x06),但仅支持7位I2C地址,不支持10位I2C地址。
4.4 运行模式
Si1143的运行模式包括关闭模式、初始化模式、备用模式、强制转换模式和自发模式,在任何时候可以处于众多运行模式中的一种。且必须考虑运行模式,因为该模式对Si1143的整体功耗有影响。
4.5 命令和响应结构
在读取或写入所有Si1143的I2C寄存器(除了写入COMMAND寄存器之外)时都不唤醒内部定序器。Si1143可以在强制测量模式或自发模式中运行。处于强制测量模式时,除非主控制器通过特定命令明确请求Si1143进行测量,否则Si1143不进行任何测量。此时需要写入CHLIST参数,以便让Si1143知道要进行哪些测量。参数MEAS_RATE为零时会将内部定序器置于强制测量模式。处于强制测量模式时,仅当主控制器写入COMMAND寄存器时,内部定时器才唤醒。处于强制测量模式时(MEAS_RATE=0),耗电量最低。当MEAS_RATE不为零时,Si1143在自发运行模式中运行。MEAS_RATE表示Si1143定期唤醒的时间间隔。内部定时器唤醒后,定序器根据PS_RATE和ALS_RATE寄存器管理内部PS计数器和ALS计数器。当内部PS计数器过期时,根据通过CHLIST参数高位启用的测量,最多执行三个临近测量(PS1、PS2和PS3)。顺序执行这三个PS测量,从PS1测量通道开始。同样当ALS计数器过期时,根据通过CHLIST参数高位启用的测量,最多执行三个测量(ALS_VIS、ALS_IR和AUX)。
4.6 命令协议
与其他主机可写入的I2C寄存器不同的是,COMMAND寄存器将内部定序器从备用模式唤醒,以处理主机请求。执行命令时,将更新 RESPONSE寄存器。通常在没有错误时,高四位不为零。为了允许命令跟踪,低四位实施4位循环计数器。一般而言,如果RESPONSE寄存器的高半字节不为零,则表示有错误或需要特殊处理。
5 结 语
在各种多元化的手势识别环境中,当用户的手被占用、出汗或手持物体而不利于触摸屏操作时,就要用到非接触式手势识别。Si114x系列传感器的手势识别系统可以满足非接触的需求。Si114x系列传感器具有高灵敏度、高效节能以及超长感应距离等优点,且封装体积小,易用性高,能够用于手机、电子阅读器、平板电脑、个人媒体播放器、办公设备、工业控制、安全系统、销售终端和其他设备,可实现高级的接近感应和非接触式界面。
参考文献
[1]武霞,张崎,许艳旭.手势识别研究发展现状综述[J].电子科技,2013,26(6):171-174.
[2]陈守满,朱伟,王庆春.图片操作的手势动态识别系统[J].现代电子技术,2012,35(22):4-6.
[3]陈龙,陈朝大,邓禧龙,等.红外线感应节水装置效果分析[J].低碳世界,2016(13):4-5.
[4]于乃功,王锦.基于人体手臂关节信息的非接触式手势识别方法[J].北京工业大学学报,2016,42(3):362-368.
[5]关然,徐向民,罗雅愉.基于计算机视觉的手势检测识别技术[J]. 计算机应用与软件,2013,30(1):155-159.
[6]李芬兰,张文清,庄哲民.基于手势识别的智能输入系统[J].汕头大学学报(自然科学版),2014(3):60-65.
[7]鲁姗丹,周松斌,李昌.基于多光源红外传感技术的手势识别系统[J].自动化与信息工程, 2015(2):22-26.
[8]杨碧玲.集成多路LED应用,Silicon Labs接近感应器扩展多种应用[J].集成电路应用,2011(12):27.
[9]刘怡君.Silicon Labs推出增强UV防护和手势识别的新一代光学传感器[J].电信工程技术与标准化,2016(2):19.
[10] Alan Sy.红外线接近感应人机界面设计要素[J].今日电子,2010(3): 31-33.
猜你喜欢
环球时报(2022-05-23)2022-05-23
纺织科学研究(2021年1期)2021-12-03
金桥(2021年4期)2021-05-21
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
电子制作(2019年7期)2019-04-25
时代英语·高一(2019年1期)2019-03-13
计算机应用(2016年12期)2017-01-13
光学精密工程(2016年3期)2016-11-07
