
多直线目标的影像畸变计算
2017-01-10 06:14:49胡亚江沙月进
城市勘测 2016年6期
胡亚江,沙月进
(1.深圳中铭勘测股份有限公司,广东 深圳 518172; 2.东南大学交通学院,江苏 南京 210096)
多直线目标的影像畸变计算
胡亚江1*,沙月进2
(1.深圳中铭勘测股份有限公司,广东 深圳 518172; 2.东南大学交通学院,江苏 南京 210096)
对于未知来源或未知摄影机摄取的近景影像,通过提取影像上多个直线目标,恢复其曲线构像为直线的过程来计算影像畸变。首先分析影像畸变类型,确定影像畸变模型,然后采用二分法进行多个直线目标影像畸变的计算方法。经过室内、室外场地的实例计算,该方法计算得到的影像畸变参数与三维鉴定场计算的结果非常接近。试验表明该方法可行,能满足小像幅图像解算的精度要求,适用于历史影像及未知来源的影像解算和纠正。
影像畸变;多直线目标;多源影像;曲线构像;二分法
1 引 言
传统摄影机的标定是以摄影机为标定对象的,不管是在摄影前或摄影后进行,标定过程都必须对摄影机实体本身来进行。普通数码相机属于非量测摄影机,利用其图像进行图像测量时,物镜畸变直接影响到图像测量的精度,物镜畸变系数的计算成为非量测摄影机标定的主要内容。在摄影测量和计算机视觉领域,许多学者对此进行过深入研究。
典型的研究成果包括:利用旋转矩阵的正交条件和非线性最优化进行相机标定(张正友,1998);利用二维DLT及光束法相结合进行相机标定(张永军等,2002);利用全线性标定方法和矢量分析法进行快速标定多相机的标定(周富强,邾继贵,2003);单幅影像上利用直线约束检校相机内方位元素(Heuvel,1999)。
生活中的近景影像的获取途径是多样化的,有历史图片、异地获取并传输的图像、各种摄影设备获取的图像、视频的取帧图像。对于这些多源近景图像,在影像解析和测量中通常无法了解其摄影设备,通过对摄影机标定来获取物镜畸变参数就不可行。
为了全面描述数码影像的畸变,这里采用影像畸变的概念来概括数码影像所包含的物镜畸变和电子畸变。影像畸变是影响非量测摄影机图像测量精度的主要因素。在已知条件不足的情况下,要获取影像的畸变参数信息,只能从影像本身提取目标隐含的几何信息来实现。
2 影像畸变模型
2.1 物镜畸变
物镜畸变参数是摄影机畸变的主要内容之一,对日益广泛使用的非量测CCD相机来说,标定是从二维图像获取三维信息必不可少的步骤(于宁锋,2007)。
目前,通用的物镜畸变解算模型见式(1),该数学模型通过建立标定场地的方法精确计算畸变系数k1、k2、k3、p1和p2。
(1)
Capitania(GianCarloCapitania等,2006)用图示的形式表达了畸变的五个影像类型,如图1所示。
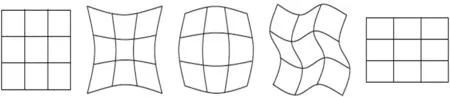
图1 物镜畸变影像类型(Gian Carlo Capitania 等,2006)
根据应用场合和精度要求的不同,国内外的很多学者做过大量的研究认为:由于在考虑非线性畸变时对摄像机标定需要使用非线性优化算法,引入过多的非线性参数(如上述模型的第二项与第三项),往往不仅不能提高精度,反而引起解的不稳定(RYTsai.,1986)。一般情况下,上述非线性模型的第一项径向畸变已能足够描述非线性畸变(刘传才,2002)。引入上式中第二项与第三项在使用广角镜头时能提高模型的精度(ODFaugeras,G.Toscani1987;Weng,1990)。对于小像幅数码图像,第一项中的第一部分k1的影响又远远大于k2、k3两部分的影响,通常只考虑畸变参数k1一项。本文研究的影像畸变是以式(2)为解算模型。
(2)
2.2 影像畸变特点
影像畸变就是物镜畸变在摄影影像上的具体体现,是依赖于物镜畸变而又独立存在的影像参数。同物镜畸变相比,影像畸变具有以下几个特点:
(1)影像畸变主要来源于物镜畸变,常规处理方法是在摄影前或摄影后对摄影机进行标定,计算出物镜的畸变系数,用物镜畸变来消除影像畸变。
(2)物镜畸变的标定都必须通过建立三维或二维标定场地进行标定来实现,而影像畸变无需标定场地,从摄影目标的几何信息中计算影像畸变系数。
(3)影像畸变参数可以脱离摄影机本身单独存在。尤其是对于未知来源的历史图像、网络传输图像、视频帧图像,在不知道何种类型摄影机的情况下,其影像畸变不仅存在而且是可以解算得到的。
(4)影像畸变包含了不受物镜影响的电子畸变。
3 多直线目标的畸变计算原理
3.1 计算原理
畸变的存在使直线目标的构像变为曲线(冯文灏,商浩亮,侯文广,2006),如果被摄目标的某个边界是确定的直线线段,其在影像上的成像理论上也必定是直线。然而,影像畸变的存在使其成像变成了曲线。
如图2 ,在图像范围内选择成像清晰、边界明显的直线目标,在直线目标的起点A、中点B和终点C各选择一点,量测其像素坐标,由于物镜畸变的存在,A、B、C三个点不在一条直线上,以图2中桶形畸变为例加以说明。
假定中间点B受影像畸变引起的向径变化为△rb,根据假定的畸变向径可以计算假定的影像畸变系数:
k1=△rb/(rb+△rb)3
(3)
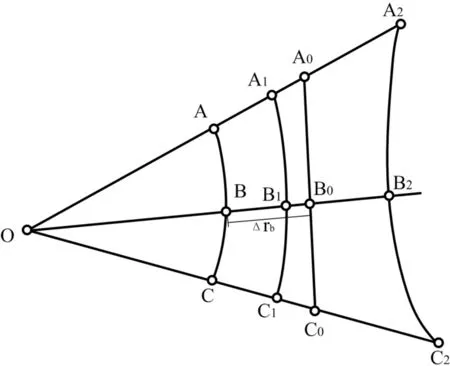
图2 影像畸变计算原理
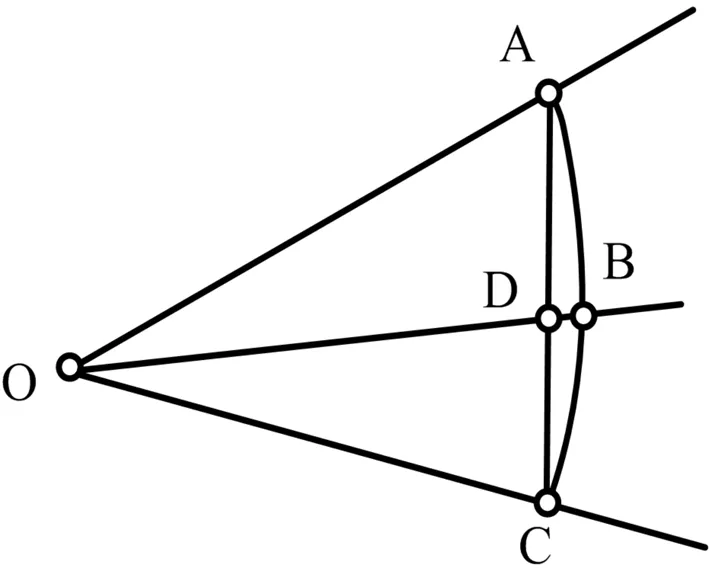
图3 影像畸变类型判断图解
进一步利用假定的影像畸变参数计算A、B、C三点的理想位置A′、B′、C′的向径:
(4)
消除假定的影像畸变后,A′、B′、C′的正确位置的像素坐标:
(5)
由于B的向径改正为△rb及其影像畸变系数都是假定的,使得消除影像畸变后A′、B′、C′三点一般不满足三点共线的条件,可能出现以下三种情况:
(1)如果假定的△rb比正确值小了,消除影像畸变后的位置为图2中的A1、B1、C1,三点的几何关系仍是桶形畸变;
(2)如果假定的△rb比正确值大了,消除影像畸变后的位置为图2中的A2、B2、C2,三点的几何关系变是枕形畸变;
(3)如果假定的△rb与正确值一致,消除影像畸变后的位置为图2中的A0、B0、C0,这三个点共线。
可见,根据直线目标改正后是否为一直线可以用来判断中间点假定的畸变向径是否正确。这里存在两个技术难点:一是改正后的目标是否为直线以及弯曲类型的判断;二是中间点的假定畸变向径的确定。
3.2 影像畸变类型的判断
影像畸变计算中,判断A、B、C三点和A′、B′、C′三点的畸变类型及是否共线是关键内容,可采用以下步骤来实现:
① 利用A、B、C三点的像素坐标计算AC和OB的交点D的像素坐标;
② 计算OD、OB的距离;
③ 若OD
3.3 二分法确定中间点畸变向径
从上面的介绍可以知道:计算B点受影像畸变引起的向径变化△rb是计算影像畸变参数的关键。由于无法直接知道△rb的值,通过二分法进行趋近计算,具体计算过程如表1中各步骤进行:
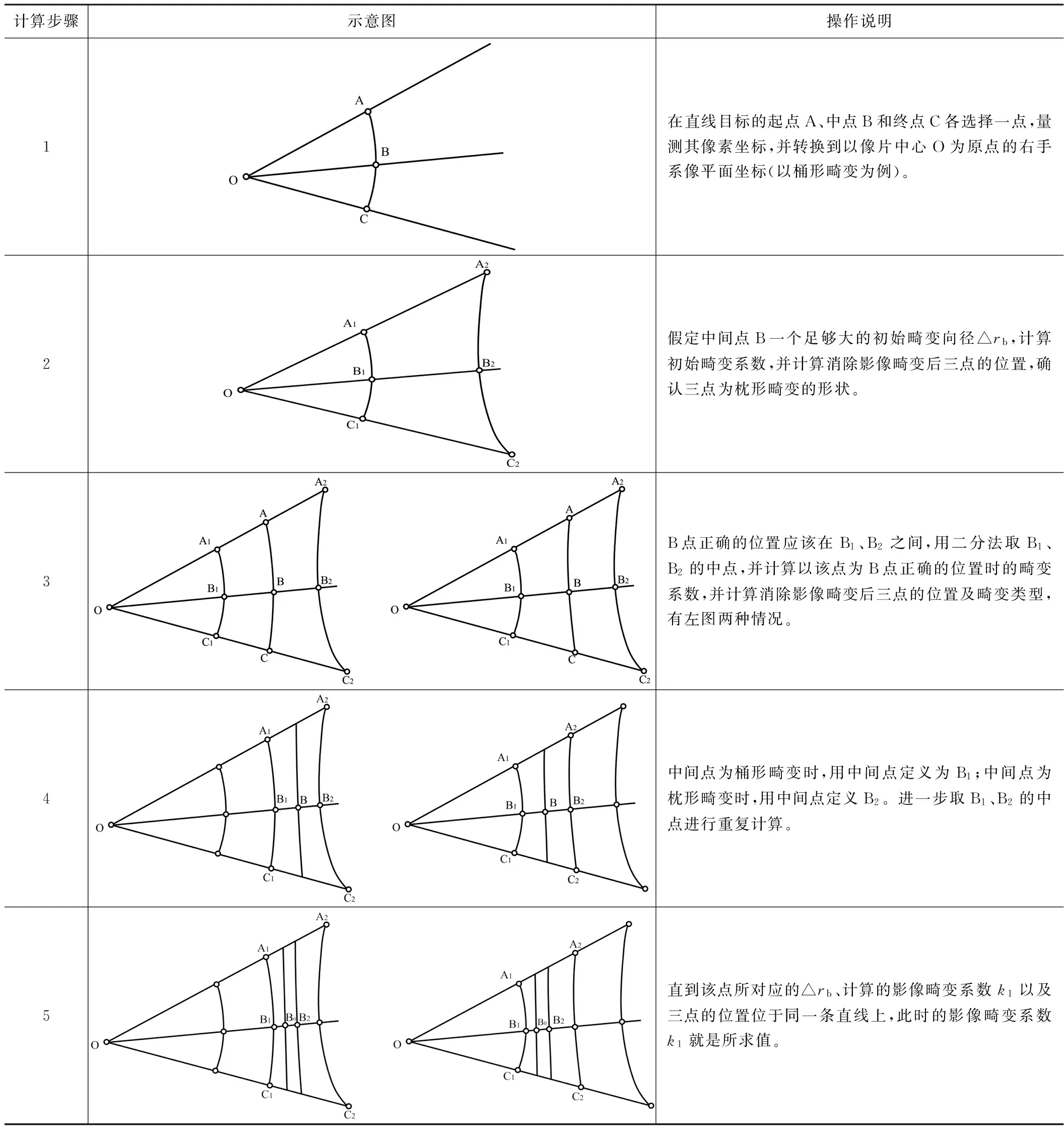
影像畸变参数计算过程 表1
3.4 影像畸变计算的程序流程
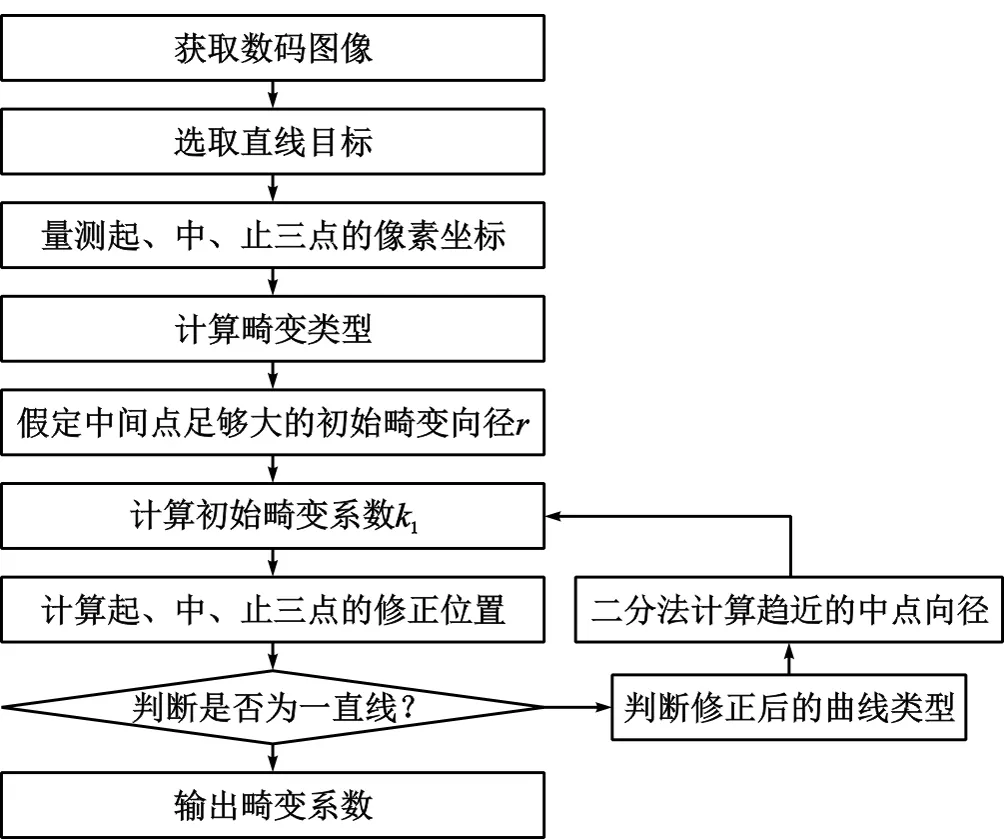
图4 影像畸变参数计算流程图
3.5 影像畸变计算的具体要求
本算法在实际操作中要注意以下几个方面:
(1)要选择确认的直线目标作为计算的依据;
(2)直线目标要避免通过像片中心;
(3)直线目标尽可能均匀分布在影像的各个位置。
4 实例计算与结果分析
4.1 室内试验场计算
在室内严格垂直的两个墙面上,精确固定两张带有 100 mm格网的高精度聚酯薄膜纸(如图5所示),精确测量72个格网点的空间三维坐标,聚酯薄膜纸的分米格网测量精确到 0.2 mm,建立精密室内试验场。

图5 室内试验场计算影像畸变
应用摄影测量软件精确量取上图影像上的72个格网点像点平面坐标,精确到0.5个像素。并对上图影像畸变参数进行严密平差计算,得到的影像畸变参数为2.21×10-8。然后采用多直线目标的方法来解算该影像的畸变参数:选取了图5中的12个直线目标,计算结果如表2所示。

室内试验场计算结果 表2
通过对12个直线目标的计算结果均值为结果2.35×10-8,影像畸变参数的较差值△k1为小值,试验结果与三维控制场的计算值非常接近,效果良好。
4.2 室外场地计算
在图6中,对(a)中的近景影像求解其畸变参数,从影像中选取了4条明显的建筑物边缘作为直线目标。通过精密全站仪实地测量直线目标上点的空间坐标,应用摄影测量软件量测直线目标上的点的像点坐标。计算得到影像畸变参数平均值为1.84×10-8。
室外场地与室内场地的计算结果有一定的差值,但是与事先通过专业的室内三维鉴定场鉴定的相机畸变参数值1.98×10-8较为接近,影像畸变参数的偏差值△k1为小值,对像点坐标的影响值在1个像素以内。
上述相机三维鉴定场系东南大学测绘工程系专用的室内三维鉴定场,试验开始前通过对鉴定场多个角度拍摄得到的像片进行平差计算,得到该试验的相机畸变参数均值作为本试验影像畸变参数的参考值。

(a)实地近景影像及其直线目标

直线目标号k1值11.76×10-821.82×10-831.91×10-841.80×10-8平均1.84×10-8
(b)影像畸变计算结果
图6 室外多直线目标影像畸变算例
4.3 试验结果分析
(1)根据像点坐标的改正公式,可推算出影像畸变参数偏差△k1对像点坐标改正的影响值。
(6)
上式中r表示向径,即像点与自准直主点之间的距离,其计算式如下:
(7)
试验中使用的SONYDSC-HX300相机,其分辨率 1 920×1 080像素。根据(7)式可计算出位于像片4个角点处的最大向径值r=1101.45像素。试验中畸变参数计算值与参考值的偏差值△k1=0.14×10-8,根据式(6)计算出其对像点坐标的最大影响值:
可以看出上述试验算例中的影像畸变参数计算值与参考值的偏差对像点坐标的最大影响值均在1个像素左右,能满足小像幅图像解算及纠正的精度要求。同时根据(6)式可以反推出像点坐标偏差值在1个像素时影像畸变参数的允许偏差值△k1:
(2)室内试验场中,利用三维控制计算结果与直线目标方法计算结果比较接近,影像畸变偏差值对像点坐标的计算和纠正影响可忽略。
(3)影像上直线目标上点的平面坐标是通过手工在软件上量取的,使得像点坐标存在一些随机的人为误差,室内直线目标上点的空间坐标是根据方格网直接量测的,室外直线目标上点的空间坐标是通过精密全站仪测得,也存在一些目标照准的误差,会造成两次计算结果的差异,从上述试验结果看,室外试验结果比室内试验结果更趋近于三维鉴定场的参考值。
5 结 语
通过提取影像上多个直线目标,恢复其曲线构像为直线的过程来计算影像畸变,实例计算结果表明该方法可行,选取的直线目标要尽量避免通过像片中心,且尽可能精确测量选取直线目标上点的坐标,直线目标应尽可能均匀分布在影像的各个位置;试验表明该方法能满足小像幅图像解算的精度要求,适用于历史影像及未知来源的近景影像解算和纠正。
[1] 冯文灏. 非地形摄影测量[M]. 北京:测绘出版社,1985.
[2] 冯文灏. 近景摄影测量[M]. 武汉:武汉大学出版社,2002.
[3] 冯文灏,商浩亮,侯文广. 影像的数字畸变模型[J]. 武汉大学学报·信息科学版,2006(2),99~103.
[4] 张永军,张祖勋,张剑清. 利用二维DLT及光束法平差进行数字摄像机标定[J]. 武汉大学学报,2002.6.
[5] 周富强,邾继贵,杨学友等.CCD摄像机快速标定技术[J]. 光学精密工程,2002.2.
[6] 谢文寒,张祖勋. 基于多像灭点的相机定标[J]. 测绘学报,2004(4),335~340.
[7] 于宁锋. 数字摄影测量系统中非量测CCD相机标定算法[J]. 辽宁工程技术大学学报,2007,26(2):190~193.
[8] 邱茂林,马颂德,李毅. 计算机视觉中摄像机定标综述[J]. 自动化学报,2000,26(1):43~55.
[9] 胡亚江,沙月进. 求解普通相机径向畸变系数的一种简便方法[J]. 测绘与空间地理信息,2009(5):182~184.
[10] 王建华,石繁槐,张婧等. 摄影机或照相机几何畸变的标定方法[P]. 专利号:CN1719477.
[11] 王浩,俞青. 一种镜头成像畸变校正的方法[P]. 专利号:CN1525396.
[12] 刘传才. 图像理解与计算机视觉(第一版)[M]. 厦门:厦门大学出版社,2002年9月.
[13] 马颂德,张正友. 计算机视觉——计算理论与算法基础[M]. 北京:科学出版社,1998.
[14] 雷成,胡占义,吴福朝. 一种新的基于Kruppa方程的摄像机自标定方法[J]. 计算机学报,2003,26(5).
[15]ZhangZY.AFlexibleNewTechniqueforCameraCalibration.MicrosoftResearchRedomond.1998.
[16]HeuvelFA.ALine2photogrammetricMathematicalModelfortheReconstructionofPolyhedralObjects.SPIE,1999 ,3641 :60~70.
Image Distortion Calculation Based on Multi-line Targets Condition
Hu Yajiang1,Sha Yuejin2
(1.Shenzhen Zhongming Survey Engineering Co.,Ltd,Shenzhen 518172,China;2.Southeast University Transportation College,Nanjing 210096,China)
For the unknown sources or unknown camera close range images,the distortion is calculated by extracting the multiple linear targets in the image,and recovering the curve conformation as a straight line. Firstly,analyze the types of image distortion,determine the image distortion model,and then calculate the distortion of multiple linear objects by applying dichotomy method. Through examples calculating of indoor and outdoor test sites,the image distortion parameters calculated by this method are almost same to the results calculated by the three-dimensional calibration field. The experiments results show the method is feasible and can satisfy small image solution precision requirements,suitable for historical images and unknown source images calculation and correction.
image distortion;multiple linear targets;multi-source images;curve conformation;dichotomy
1672-8262(2016)06-70-06
P234.1
B
2016—04—27
胡亚江(1980—),男,硕士,高级工程师,主要从事摄影测量与地理信息工程的研发工作。
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
汽车维修与保养(2020年11期)2020-06-09 05:42:16
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03
