
直驱伺服控制技术在军用雷达上的应用
2017-01-09 08:10胡军辉
甘肃科技 2016年23期
胡军辉,孙 颖
(1.甘肃长风电子科技有限责任公司,甘肃 兰州 730070;2.中航工业兰州万里航空机电有限责任公司,甘肃 兰州730070)
直驱伺服控制技术在军用雷达上的应用
胡军辉1,孙 颖2
(1.甘肃长风电子科技有限责任公司,甘肃 兰州 730070;2.中航工业兰州万里航空机电有限责任公司,甘肃 兰州730070)
传统带有减速机构的雷达伺服系统,由于谐波减速器的存在,系统谐振频率较低,伺服系统带宽受到严重制约。直驱伺服控制技术取消了传动机构,采用电机直接带动天线的方式,消除转动回差,增加系统传动刚性,解决了伺服带宽不足及低速爬行等问题,提高系统对载体扰动的隔离度。直驱伺服控制技术具有快速的响应特性,可极大的提高系统的跟踪精度和动态跟踪特性,可以满足军用舰载雷达超音速蛇形机动飞行、大过载条件下对目标的跟踪需求,提高导弹武器系统的跟踪和命中精度。
雷达伺服;直驱;隔离度;蛇形机动
现代武器、飞机等雷达跟踪目标的飞行速度越来越快,机动性越来越高,这就要求精密跟踪雷达伺服系统要有足够高的动态响应性能,才能跟踪此类目标。
传统雷达伺服控制系统具有减速传动机构,传动间隙无可避免,天线运动过程会产生回差,影响雷达的跟踪精度,严重制约了雷达伺服系统带宽,无法适应超音速和高超音速蛇形机动飞行对雷达伺服系统的跟踪稳定性、抗过载要求。
为解决传统雷达伺服系统跟踪精度差、带宽不足等问题,直驱雷达伺服控制系统取消传动机构,采用电机直接带动天线的传动方式,消除转动回差,增加传动刚性,以此来解决伺服带宽不足及低速爬行等问题。
1 系统方案设计
根据任务需求雷达伺服系统应具有快速响应的特性,以提高系统的跟踪精度和指向精度,因此雷达伺服系统应具有很宽的调速范围。为了满足设计指标,伺服控制系统采用位置、速度和电流三个嵌套闭环回路组成,其中位置、速度环设计为二阶无静差系统,电流环设计为一阶无静差系统,位置环和速度环控制采用数字方式实现,电流环采用模拟电路方式实现。
直驱伺服控制系统总体设计分为两大模块:天馈伺服组合模块和伺服控制模块。天馈伺服组合模块包括:直流力矩电机,方位、俯仰位置传感器,方位、俯仰速率传感器,伺服驱动电路,方位、俯仰机械轴及轴承等结构连接件。伺服控制模块包括:天线方位、俯仰支路的角度信息转换电路,方位、俯仰支路速度信息转换电路,DSP数据处理芯片,D/A转换电路,电源调整电路,硬件复位电路,JTAG仿真接口电路及外扩RAM存储电路等,如图1所示。
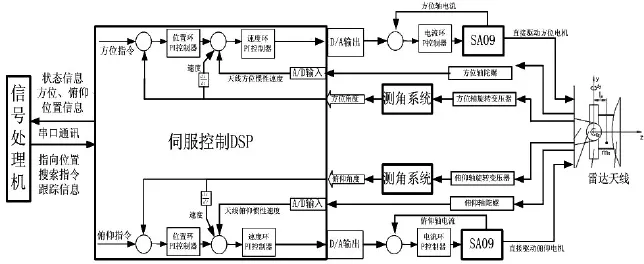
图1 直驱伺服控制系统总体结构图
2 系统组成
2.1 硬件系统
直驱伺服控制系统硬件包括伺服控制器和伺服驱动器。
伺服控制器主要实现与雷达信号处理机实时通信和对天线位置信息及载体速率信息的实时采集,将采集到的数据信息参与控制解算,最后将转换的控制量送往伺服驱动器,完成天线位置和速度的闭环控制。
直驱伺服系统通过伺服控制电路与处理机通信,在接收到雷达信号处理机发送的当前工作状态指令、装定范围、跟踪中心角及角误差等信息,同时结合自身解算的实时天线位置、天线速度信息及陀螺信息等共同完成各种工作模式下的雷达天线位置和速度的精确控制。
伺服系统控制电路采用多片A/D同时采集与控制有密切关系的各路模拟信号,并用锁存器锁存转换的数字信号,时序的控制主要由DSP和CPLD完成。伺服控制电路的硬件主要包括TMS320LF2407A(DSP芯片)、AD2S80(位置信息转换 元 件 )、AD7952 (A/D)、AD669(D/A)、EPM7064(CPLD)等等。AD2S80实现对天线方位和俯仰位置信息的采集转换,AD7952实现对陀螺速度信息的采集转换,TMS320LF2407A则通过数据线读取实时数据并结合处理机的控制指令解算出方位、俯仰电机控制电压,再由AD669实现数/模转换,将控制量送往伺服驱动电路,最后经过驱动放大得到方位、俯仰电机的电压控制信号。以下给出直驱伺服控制原理框图,如图2所示。

图2 直驱伺服控制系统原理框图
2.2 软件系统
直驱伺服控制系统采用自动化数字控制方式实现。信号采集、处理、运算通过DSP及外围器件完成,控制器通过软件算法完成。
2.2.1 软件结构(如图3所示)
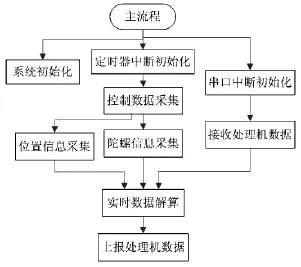
图3 直驱伺服控制系统软件内部结构图
1)系统初始化。实现对DSP内寄存器进行初始化,包括:系统时钟设置、看门狗设置、清除中断标志、打开中断、复用I/O口功能设置等工作。
2)定时器中断初始化。包括定时器1周期中断使能,清除中断标志,定时器1周期、模式设置及定时器计数器清零等。
3)串口中断初始化。实现伺服控制系统与信号处理机之间串口通信,包括:通信数据格式设置,使能SCI接收与发送,使能接收和发送中断,系统波特率设置及接收、发送中断优先级设置等。
4)接收处理机数据。接收信号处理机发来的串口控制数据。向“实时数据解算”提供数据。
5)控制数据采集。包括天线方位、俯仰角度数据及方位、俯仰陀螺数据采集。
6)实时数据解算。接收信号处理机工作状态指令、装定范围、跟踪中心角及角误差等信息,控制雷达伺服系统进入对应工作状态流程。各模式下通过数字算法及位置环、速度环PI调节器解算得出实时天线控制量,对当前天线位置、速度信息实时校正控制。
根据雷达功能实现情况,实时数据解算可划分为:待机模式数据解算、信息装定模式数据解算、目标搜索模式数据解算、目标跟踪模式数据解算及目标丢失扇扫模式数据解算等。
7)上报处理机数据。向信号处理机发送SCI串口数据,此数据包含了天线角度、天线视线角速度信息及伺服系统的状态等信息,如图4所示。

图4 直驱雷达伺服系统软件功能图
2.2.2 软件算法
由于直驱伺服控制系统结构的灵活性,系统控制算法采取增量式PI调节器。增量型算法不需要做累加,计算误差后产生的计算精度问题,对控制量的计算影响较小。增量型算法得出的是控制的增量,误动作影响小,必要时通过逻辑判断限制或禁止本次输出,不会影响系统的工作。
增量式PI调节器输出:

u(k)—输出函数;u(k-1)—上周期输出;KP—PI调节器比例放大系数;KI—PI调节器积分时常数;Tsam—采样周期。
3 结论
直驱伺服控制技术具有快速的响应特性、宽的调速范围及抗过载能力,可极大的提高军用雷达系统的跟踪精度和动态性能,满足舰载雷达超音速蛇形机动飞行、大过载条件下对目标的跟踪需求,提高导弹武器系统的作战能力和命中精度。
[1] 向敬成,张明友.雷达系统[M].北京:电子工业出版社, 2001.
[2] 美M·I·SKOLNIK,王军等译.雷达手册(第2版)[M].北京:电子工业出版社,2003.
[3] 王德纯,丁家会,程望东.精密跟踪雷达测量技术[M].北京:电子工业出版社,2006.
[4] 美FredE,Nathansen·J·PatrickReilly,MarvinN·Cohen.雷达设计原理[M].合肥:电子工业部第38研究所,1992.
[5] 陈伯时.电力拖动自动控制系统(运动控制系统)[M].北京:机械工业出版社,2003.
[6] 陈隆昌,陈筱艳.控制电机[M].西安:西安电子科技大学出版社,1994.
[7] 刘和平.TMS320LF240xDSPC语言开发应用[M].北京:北京航空航天大学出版社,2003.
[8] 黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2004.
TB3
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
北京航空航天大学学报(2022年6期)2022-07-02
幼儿园(2021年12期)2021-11-06
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
中国修辞(2016年0期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
