
海洋资料浮标波能供电装置数值模拟研究
2017-01-06 05:50赵环宇孙金伟范秀涛郭发东张继明柴辉
山东科学 2016年6期
赵环宇 ,孙金伟,2 ,范秀涛 ,郭发东 ,张继明 ,柴辉
(1.山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001;2.中国海洋大学工程学院,山东 青岛 266100)
【海洋科技与装备】
海洋资料浮标波能供电装置数值模拟研究
赵环宇1,孙金伟1,2,范秀涛1,郭发东1,张继明1,柴辉1
(1.山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001;2.中国海洋大学工程学院,山东 青岛 266100)
海洋资料浮标的电源补给问题是亟待解决的关键技术之一。本文以浮标现有技术参数为基础,通过数值模拟研究以浮标标体作为能量吸收系统,传统齿轮齿条形式作为能量输出系统,永磁发电机配合滤波整流稳压模块作为电力输出系统的海洋资料浮标波浪能供电装置的可行性。计算结果表明,不考虑各阻尼,浮标体在波浪作用下可满足高转速、低扭矩的500 W三相交流永磁同步发电机的装机容量,同时理论计算发电机的输出电压可达到海洋资料浮标蓄电池14 V的充电要求。
海洋资料浮标;波浪能供电装置;数值模拟
海洋资料浮标是一种无人值守的能够自动获取海洋气象、水文、水质等物理、生化参数的水面漂浮式自动监测平台,具有全天候、全天时稳定可靠地收集海洋资料的能力,并能实现数据的自动采集、自动标示以及自动发送[1]。海洋资料数据采集的重要性在世界各国已上升到战略高度,因此海洋资料浮标的相关研究及其关键技术的突破是目前国际上的发展趋势。
海洋资料浮标技术是复杂的多学科理论交汇的产物,其涉及理论力学、流体力学、结构力学、数据通信、信号处理、传感器技术等多个领域,总体来说关键技术可分为六大部分,即浮标标体、数据传输与通信、数据采集与控制、传感器、系留系统以及能源供给。我国在双向通信交互、水下数据实时传输、传感器总线式处理控制技术方面已处于国际先进水平,但其他技术如能源供给等方面仍处在模仿阶段,缺乏自主知识产权[2]。
海洋资料浮标的电源系统是浮标系统长期工作的基础,早期的海洋资料浮标并没有在位的能源补充方式,均采用一次性电池、陆地充电或海上更换电池的方式进行电力能源补给。由于海洋资料浮标趋于标体大型化和传感器多样化,因此电力消耗也随之增大,而传统电池重量大、体积大导致的海上更换难度增大使得传统电池的名次逐渐从海洋资料浮标的优选能源榜下滑。近年来,太阳能电池在技术上和性能上迅速发展太阳能电池阵列具有重量轻、寿命长、可靠性高、无污染等优势,为海洋资料浮标的使用创造了条件。
但是,环境温度的变化对太阳能电池的响应度和暗电流有较大的影响,由于光吸收系数与温度有关,随着海洋资料浮标在远洋深海极地海域的投放使用,若使用太阳能作为单一供电能源,会导致海洋资料浮标在长期暴雨、无光天气下无法正常工作,因此多能(太阳能、波浪能、风能、潮流能等)互补智能供电系统应运而生[1]。
波浪能是蕴藏在水体波浪运动中的能量,而波浪运动是海洋运动的主要形式之一,是由于海水受海风及气压等作用的影响而产生的波动。波浪能是能量储备最丰富的海洋可再生能源,也是全世界研究得最为广泛的一种海洋能源,同时也是所有海洋能源中最不稳定的一种。虽然与其他常规能源相比,海洋能整体的能量密度较低,但是在众多海洋可再生能源中,波浪能的能流密度相对较大,在某些地方可以达到100 kW/m,利用价值相当可观。图1为Gunn等[3]基于2005—2011年全球波浪场模型NOAA Wave WatchⅢ (WW3)发布的世界沿岸年平均波功率、波能密度等值线及波向分布图,箭头表示平均波向。图中可见波能资源最为丰富的地点基本聚集在大陆块的西海岸,波向偏西。波浪能较丰富的区域主要集中在南纬和北纬40°~60°区域内,南半球所占比例较大[4]。
为了更好地获得波浪能,本文通过数值模拟,研究了海洋资料浮标的波能供电装置。

图1 世界沿岸年平均波功率密度等值线及波向分布图Fig. 1 Coordinate of buoy motions and annual mean power density
1 波能供电装置原理
波浪是海面在外力(主要是风力)的作用下,海水质点离开其平衡位置的周期性或准周期性的运动。由于流体的连续性,运动的水质点必然会带动其临近的质点,从而导致其运动状态在空间传播[5]。简单地说,风吹过海洋,通过海-气相互作用把能量传递给海水,形成波浪,将能量储存为势能(水团偏离海平面的位势)和动能(通过水体运动的形式)[6]。将波浪中的这些机械能捕获、传递并将其转化为电能是波浪能发电的关键,因此各种捕能方式以及能量传递方式应运而生。这些波浪能转换装置都有特定的安装位置以及固定方式,不同的类型相互组合、配合才能得到最适合海洋条件的装置。
按照装置的安装位置,可将波浪能供电装置分为离岸式、近岸式和靠岸式3种。按照装置在海中的锚定方式,可分为固定式和漂浮式2种。按照波浪能的捕获方式以及能量传递方式,可分为振荡水柱式、聚波越浪式和振荡浮子式3种[7]。除此之外,还有筏式、摆式、点吸收式、鸭式等形式。
波浪能供电装置能量系统一般包含三级能量转换。一级转换系统与波浪直接接触,捕获波浪能的过程主要表现为将波浪的动能转化为机械能或将海水水位升高转换为水的势能;二级转换系统通过空气透平、空气叶轮、低水头水轮机等设备将捕获的波浪能短期储存为机械能,并使之转换为更适合用于驱动发电机运行的动能,例如永磁风力转子发电机旋转的动能和直线电机往复切割磁感线的动能等;三级转换系统主要是通过发电机将一级二级转换来的能量转换成电能,再通过一系列电力变换装置将收集到的品质不良的电能转换成品质较好的电能进行储存或使用。
由于海洋资料浮标标体为漂浮式浮子结构,标体随波浪运动的同时就将波浪中的能量转化为了标体运动的机械能,因此与海洋资料浮标相结合的波浪能供电装置的转换方式便可以振荡浮子形式设计。
2 波能供电装置设计
由于波浪能转换机构是与海洋资料浮标标体相结合进行能量转换,浮标体作为能量一级转换的吸收装置,其尺寸大小、重量、转动惯量、重心、浮心等物理参数决定了其所受的波浪力的大小,进而决定了所能吸收的波浪能的多少,因此就需要浮标标体在零PTO(power take-off)阻尼以及零电磁阻尼的情况下所受波浪力达到一个合适的范围,才能使得能量输出系统、电力系统正常工作,才能满足波浪能向电能的正常的转换,进而满足海洋资料浮标蓄电池的电力供应。
另外,波能转换机构要与标体产生足够的相对运动才,能满足能量从浮标运动的机械能向PTO系统的机械能(或内能)转化,因此整体结构会在原有标体的基础上进行改变,尤其是浮标体下部结构以及锚固系留系统,系留系统的形式将区别于传统的全锚链式、拉紧型、半拉紧型、松弛型以及弹性系留系统等。本文着重研究浮标体的水动力学性能,进而研究以浮标体作为能量吸收系统进行波浪能供电的可行性,因此整体装置的设计以及具体机构的细节设计不做详细赘述。
为了更好地获得波浪能,选择直径3 m标体的海洋资料浮标进行设计研究,浮标的三维模型以及尺寸图如图2所示。由于浮标体上部结构复杂,且有搭载较多观测气象数据传感器的小平台,导致整个浮标体上部的空间较小,因此PTO系统选用传统的齿轮齿条形式,如图3所示,齿轮、增速系统、发电机以及稳压过流保护系统均安装在仪器舱内部,将整流滤波后的DC电流充入电池舱内的蓄电池中,做好足够的水密性,保证浮标体在随波运动情况下的密封性及安全性。
能量输出系统中的增速系统选择最简单的大齿轮带动小齿轮,以增加与发电机相连接小齿轮的转速,这就需要浮标体在波浪作用下有足够的力以带动大扭矩增速系统的转动,并且要有足够的垂荡位移以保证发电机有足够的转速产生充电压差。因此本文将在后续数值模拟中计算不同工况下浮标体所受的波浪力,以及浮标体单自由度的垂荡位移,进而与发电机的启动扭矩相比较,以验证波浪能供电的可行性。

图2 浮标三维模型及尺寸图Fig. 2 Three-dimensional model and size of data buoy
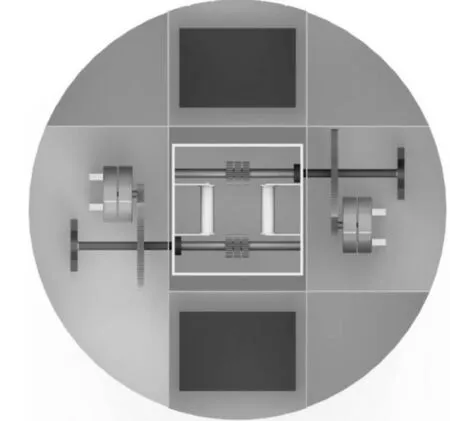
图3 能量输出系统内部结构图Fig. 3 Internal structure of the power take-off system
3 数值计算模型
3.1 控制方程
假设流体是均匀、无旋、不可压缩的理想流体,自由表面微幅波动。在笛卡尔坐标系中,当长峰波角频率为ω时,势函数、速度和自由面平移量之间的关系可以如下表示:
(1)

满足拉普拉斯方程:

(2)
自由面条件:

(3)
物面条件:
(4)
海底条件:
(5)
辐射条件:远离物体的自由面上有波外传。

以上公式中,拉普拉斯(Laplace)方程和边界条件均为线性,应用迭加原理将速度势函数分解,将不定常的速度势分解可得到:

(6)


(7)

(8)
其中,φI为单一频率、单一方向的平面入射波速度势,可由下式求出:

(9)
式中,A为波浪振幅,k为波数,h为水深,g为重力加速度,β是波浪传播方向与x轴正方向的夹角,其中波数2π/L,可以根据自由表面及水底的边界条件来确定。
在动坐标系中,浮体时域运动方程为:

(10)
式中,M,m分别为浮体的广义质量阵、附加质量阵;K(t-τ)为系统的延迟函数阵;C为浮体的静水恢复力系数阵;Fw(t),Fwind,Fc,Fsn(t),Fm(t)分别为一阶波浪力、风力、流力、二阶波浪力、锚链张力。
一阶波浪力Fw(t)可根据Cummins提出的时域与频域波浪力的卷积关系求得:

(11)

二阶波浪力的模拟采用纽曼近似方法计算。根据间接时域法,经过傅里叶逆变换,得延迟函数为:

(12)
式中λij是频域中浮体的阻尼矩阵。
时域中的浮体附加质量为:

(13)
式中,u是频域中浮体的附加质量矩阵,ω0为任意值[8]。
本文通过三维有限元数值模拟软件对浮标数值模型进行水动力学数值模拟,控制方程基于3.1所描述。其中一部分计算模块主要运用流体(一般是水)的辐射理论以及衍射理论[9]进行流固耦合计算求解,中间也包含了浅水效应计算模块,程序可以计算浮体结构的一阶或是二阶波浪力(考虑波浪力二阶项的3D绕射散射分析程序2ndorder3D)以及浮体结构的响应,即频域计算模块。
另一部分计算模块则是用于计算在特定波况下,水工结构物各水动力学参数的时程曲线,在计算时调用源数据文件中的结构物的附加质量、辐射阻尼及衍射力,再考虑考虑浮体结构间停泊线和铰接的影响,计算浮体的运动响应。此模块重新计算每个时间步长的水动力载荷的一阶波浪力,一阶波浪力又分为弗汝德-克雷洛夫力(Froude-Krylov,F-K力)以及衍射力(diffractionforce)部分,即时域计算模块。
3.2 试验验证
为确保数值模型以及数值模拟算法的准确性,从而保证计算结果准确性,本文在大连理工大学船模试验水池进行浮标模型水动力特性试验,水池造波机所造波浪的频率范围覆盖海洋波浪的主要频率,浮标横摇由数字陀螺仪测量,通过数值模型计算浮标无锚链时的横摇幅值,与试验结果进行比对分析,以验证数值模拟方法的准确性。如图4、5所示为浮标模型试验布置方案,以及模型试验照片。

图4 浮标模型试验布置方案Fig.4 Experiment deployment of the buoy model

图5 模型试验照片与三维有限元模型照片Fig.5 Experiment photo and three-dimensional finite element simulation of the model
模型试验的几何长度比尺为λL=10,由于试验中重力起控制作用,故按照Froude数相似,即重力相似准则进行设计,其中Froude数可表示为:
(14)

图6 浮标试验与数值模拟横摇幅值频域比较Fig.6 Frequency domain amplitude comparison between buoy practical experiment and numerical free floating raos-pitch
根据试验模型的比尺进行三维有限元数值模型的建立,并进行网格划分,参数设置后进行计算,得到试验模型的横摇幅值数值模型计算结果,与试验得到的横摇幅值结果进行比较,如图6所示,由于数值模型在计算过程中忽略了许多非线性项的影响,导致在波浪周期较小、频率较大时产生较大误差,但由于周期较小时的波高以及波浪的整体能流密度均较小,浮标体的能量利用率也较低,因此在后续数值模拟计算中未进行误差较大的高频率低周期段计算,但全频段整体计算结果拟合度较好,证明了数值模型的准确性以及数值模拟方法的可行性。
3.3 数值模型
通过三维有限元软件建立3m浮标的三维水动力数值模型,如图7所示进行网格划分以及参数设置等,进而进行频域以及时域的计算,上文提到浮标体作为波浪能量一级转换的吸能结构,其所受的一阶波浪力大小决定了浮标体吸收能量的多少,因此一阶波浪力是数值模拟的主要计算参数,图8所示为频域计算结果,分析不同频率下一阶波浪力以及F-K力受力大小可知,在频率较小的情况下辐射力较小,基本可以忽略,因此在本文所设计不同海况周期下时域计算就仅考虑F-K力进行分析讨论。

图7 浮标体三维有限元模型图Fig.7Three-dimensional finite element simulation model of the buoy

图8 一阶波浪力以及F-K力频域计算结果Fig.8Frequency domain calculation result of first-order wave force and F-k force
由山东省科学院海洋仪器仪表研究所在120°E、30°N附近海域投放的3m浮标波浪监测数据所知,在无台风等极端海况影响下波高与周期均较小,因此数值模型所用波浪工况选择也考虑了海洋资料浮标实海况投放海域的平均波高及周期进行选择。表1所示装置正常工作海况计算表。

表1 装置正常工作海况计算表

图9 浮标1.0 m波高5 s周期下F-K力时域曲线Fig.9 Time domain curve of F-K force in 1.0 m wave height and 5 s period
图9所示为工况P3下F-K力10个周期内的受力曲线图,可见浮标体在多数情况下的F-K力均较大。再比较不同工况下浮标体F-K力的最大值以及平均值,见图10,以此计算在无阻尼情况下浮标单自由度垂荡运动能够提供给能量输出系统的力,再与发电机的最大启动扭矩以及额定扭矩相比较,以此判断整个波浪能供电系统的电力输出情况。
图11为浮标体在不同工况下单自由度升沉运动幅值,由于整个系统无任何阻尼输出,同时不考虑流体的粘性,因此在惯性作用下,浮标体运动幅值较大。单个周期内浮标体运动幅值可换算为能量输出系统齿轮的转速,进而换算成波浪作用下发电机的转速,以此判断能否达到蓄电池的充电电压。
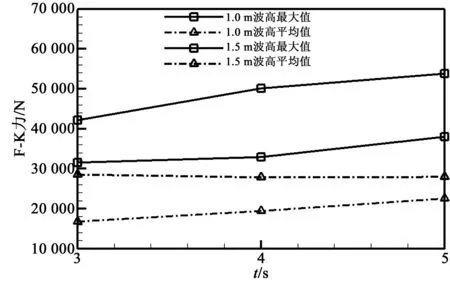
图10 不同周期不同波高下浮标F-K力最大值及平均值Fig.10 Maximum and average valve of the F-K force for different wave heights and periods

图11 不同周期不同波高下浮标运动幅值Fig.11 Motion amplitude of the buoy for different wave heights and periods
3.4 结果分析
3m海洋资料浮标的供电系统一般采用蓄电池组供电方式,对浮标系统提供单一工作电压。系统具有蓄电池过压、过流保护功能,同时考虑到扩容传感器的供电余量。
浮标蓄电池安装在密封的电池舱中,同仪器舱隔绝。其标称电压为14±2.1V,供电能力大于10A,电池容量为400Ah。由于海上波浪的不稳定性,导致发电机转速的不稳定,使得发电机发出的电并不是恒定电流,因此蓄电池不采用恒定电流的充电方式,但在波浪较大的情况下,发电机转速较大,使发电机输出电压升高,经滤波整流后可与蓄电池产生压差,进而产生充电电流,即使充电电流很小也可充电。
发电机采用专利技术的三相交流永磁同步发电机,配以特殊的定子设计,有效地降低了发电机的阻转矩。相关参数见表2。
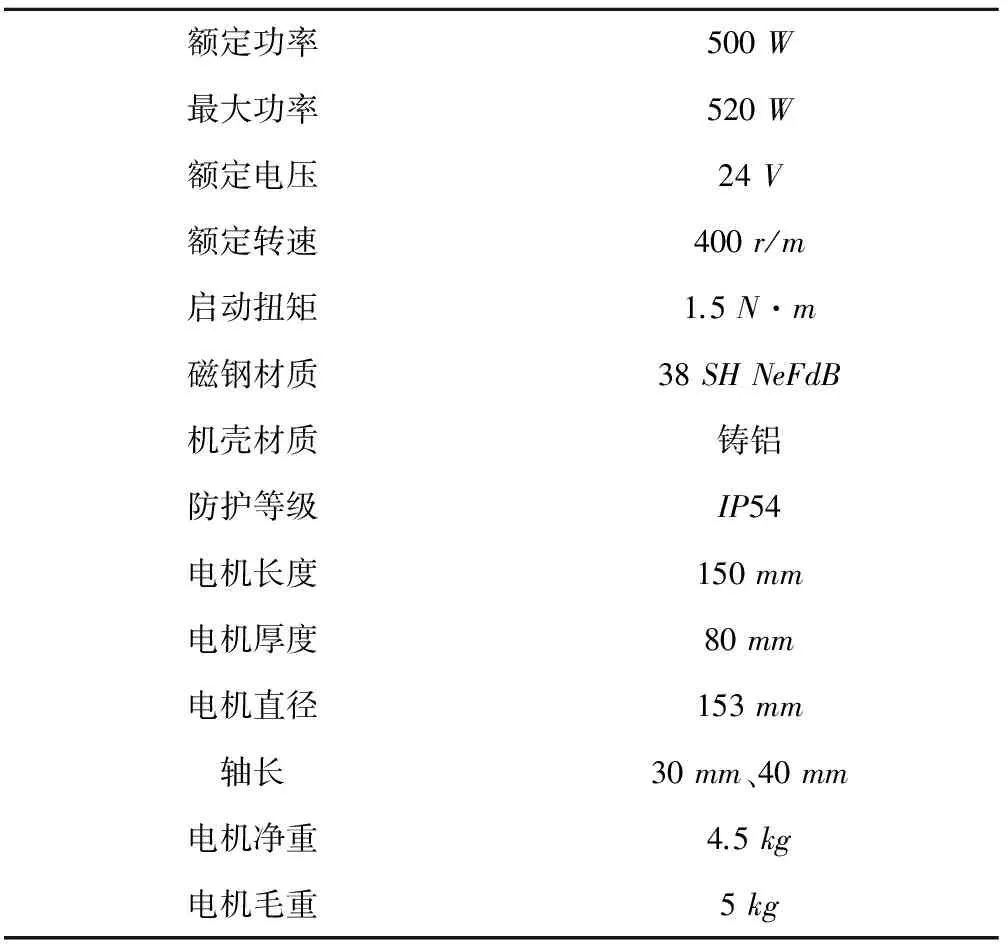
表2 发电机具体参数
对永磁发电机进行输出电压情况测试,见表3和图12所示,不同转速下发电机三相电压的有效值以及整流输出之后的直流电压不同,若要满足蓄电池的充电电压14V,则需要发电机的转速在200r/min以上,即3.3r/s以上。得到所需发电机的转速,便可根据数值计算结果确定浮标体在波浪作用下通过齿轮齿条的能量输出系统能否达到蓄电池的14V的充电电压。

表3 永磁发电机不同转速电压输出结果

图12 不同转速下发电机整流输出电压Fig.12 Rectified output voltage for different rotational velocities


由于浮标体正常工作波高下受力平均在10 000N以上,根据波浪能10%~20%的能量转换效率,直径3m海洋资料浮标标体所受波浪力配合所选用的齿轮齿条形式的能量输出系统,可满足发电机额定功率的最大扭矩,即可使发电机产生满足蓄电池充电的电压,波浪能供电具可行性。
4 结语
本文研究了波浪能的利用与向电能的转换,旨在解决海洋资料浮标的能源补给问题,通过数值模拟的手段,计算了基于直径3m浮标体的波浪能供电装置的水动力学性能,计算结果表明,在不考虑各阻尼时,基于齿轮齿条形式的能量输出系统在浮标体受波浪作用下,可满足高转速、低扭矩的500W三相交流永磁同步发电机的装机容量,同时理论输出电压可达到海洋资料浮标蓄电池14V的充电要求。该研究基本提出了基于浮标标体的波浪能供电装置的供电方案,同时证明了供电的可行性,为后续细节方案的设计提供了理论仿真的基础,同时也为试验样机与工程样机的加工制造提供了参考。
[1]王军成. 海洋资料浮标原理与工程[M].北京:海军出版社, 2013.
[2]王波, 李民, 刘世萱,等.海洋资料浮标观测技术应用现状及发展趋势[J]. 仪器仪表学报, 2014, 35(1): 2401-2414.
[3]GUNN K,STOCK-WILLIAMS C. Quantifying the global wave power resource[J]. Renewable Energy, 2012, 44: 296-304.
[4]马哲. 振荡浮子式波能发电装置的水动力学特性研究[J].青岛:中国海洋大学, 2013.
[5]王传昆,卢苇. 海洋能资源分析方法及储量评估[M].北京:海洋出版社2009,52.
[6]国家海洋技术中心. 中国海洋能技术进展[M].北京:海洋出版社,2014.
[8]Ansys Inc. AQWA Theory Manual. Release 15.0 [EB/OL].[2016-03-18].http://docslide.us/documents/aqwa-theory-manual.html.
[9]吴秀恒. 船舶操作性与耐波性[M]. 北京:人民交通出版社, 1988.
Numerical simulation of wave energy convertor of ocean data buoy
ZHAO Huan-yu1, SUN Jin-wei1,2, FAN Xiu-tao1, GUO Fa-dong1, ZHANG Ji-ming1, CHAI Hui1
(1.Shandong Provincial Key Laboratory of Ocean Environmental Monitoring Technology, Institute of Oceanographic Instrumentation, Shandong Academy of Sciences, Qingdao 266001, China;2. School of Engineering, Ocean University of China, Qingdao 266100, China)
∶Power supply is one of the key issues in ocean data buoy. We address the feasibility of wave energy convertor of ocean data buoy with buoy body as wave energy absorption system, gear and rack as power take-off system and permanent magnet wind turbine and rectifier voltage regulator module as power output system, based on numerical simulation and the existing technical parameters of ocean data buoy. Analysis of calculation results shows that wave buoy body can satisfy installed capacity of 500 W three-phase AC permanent magnet synchronous generator if no damping. Generator output voltage of theoretical calculation can also meet the charging requirement of ocean data buoy battery of 14 V.
∶ocean data buoy; wave energy convertor; numerical simulation
10.3976/j.issn.1002-4026.2016.06.002
2016-04-25
山东省自然科学基金(ZR2015PE019);海洋公益性行业科研专项子课题(201305028-3);重点海域海洋环境精细化监测集成应用示范(2013BAB04B00)
赵环宇(1989—),男,研究方向为海洋浮体水动力学以及海洋可再生能源实用化技术开发。E-mail:zhyfaint@vip.qq.com
P741
A
1002-4026(2016)05-009-10
猜你喜欢
家教世界(2023年4期)2023-03-04
学苑创造·A版(2022年4期)2022-06-18
垂钓(2022年3期)2022-05-14
舰船电子工程(2021年5期)2021-06-04
当代陕西(2020年24期)2020-02-01
垂钓(2019年2期)2019-09-10
电子制作(2019年7期)2019-04-25
小哥白尼(趣味科学)(2018年12期)2018-12-18
军事文摘(2016年16期)2016-09-13
智能建筑电气技术(2015年5期)2015-12-10
