论蚁群算法在特种机器人智能控制中的应用
2017-01-06 07:31周君惠州工程技术学校广东惠州516000
工程建设与设计 2016年18期
周君(惠州工程技术学校,广东惠州516000)
论蚁群算法在特种机器人智能控制中的应用
周君
(惠州工程技术学校,广东惠州516000)
随着科技的不断进步,国内外各领域专家学者相互努力共同打造了智能机器人。模糊神经网络理论通过自身所拥有的归纳等能力,有效地帮助了人们更好地控制机器人。使其具备自我学习和联想能力,通过蚁群算法优化的模糊神经网络理论能够更好地控制特种机器人,有效地应对工作中随机出现的变化问题。
特种机器人;蚁群算法;人工智能控制;模糊神经网络
【DOI】10.13616/j.cnki.gcjsysj.2016.12.179
1 创建机器人的数学模型
任何机械物体的运动都需要理论与实践的支持,而特种机器人的研究也是如此,对特种机器人进行操控就需要对它的各个运动构件的方位、位置、速度等建立一个合理有序的关系。而机器人的空间坐标、运动等可以通过数学模型来呈现。
1.1 特种机器人的空间坐标
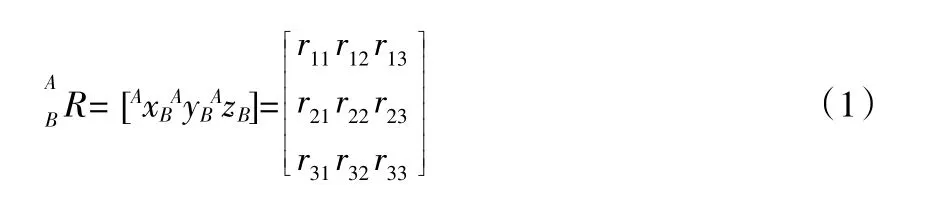
首先,描述特种机器人的空间坐标,可以用X,Y,Z轴方向的向量表示。其次,对于机器人的运动和操作,方位的准确明了非常关键。而特种机器人的方位也可用坐标系来表示。设一直角坐标系{月}与此刚体固接,坐标系{B}的三个主轴方向的单位矢量XB、YB、ZB相对于坐标系{A}的方向余弦组成的3×3矩阵称为ABR旋转矩阵:式中,R的上标A和下标B表示R是{B}相对于{A}的关系;r为矢量矩阵的单位向量。而刚体{A}的位姿可通过上述所说的坐标系{B}在坐标系{A}中的各个方位和位置来阐述,进而{B}的原点根据其在坐标系{B}、{A}中的方位,分别表示了刚体在其中的位置和方向,式(2)表示{B}的位置矢量,用ABR和APBORG来描述坐标系{B},其中APBORG是确定坐标系{B}的位置矢量,建立公式(2):

1.2 机器人运动方程
连杆坐标系、动力学方程、运动学方程都是操控机器人运动所需要的。特种机器人中的机械臂系统是一种涉及各杆、各关节、机械臂末端相对于绝对坐标的位姿、运动等的多刚体系统。其中,连杆坐标系的建立则为更好地操控机器人,使其高效长久地运动、工作做出了巨大的贡献,图1则为连杆坐标图。
虽然建立了连杆坐标系,但是其中的杆与杆的关系则要建立一个齐次变换阵来连接。通过这个矩阵,机器人末端连杆在笛卡尔坐标系里的位置和位姿便可得出。
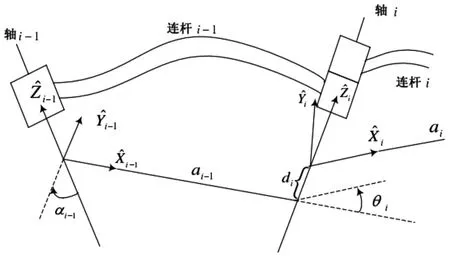
图1 连杆坐标系
1.3 机器人动力学方程
机械臂系统的运动学模型建立以后,还需建立动力学模型来控制。而动力学解决的问题是2种相对问题:若已知关节的施加力或力矩,求其速度、位移、加速度等;反之,则求力或矩阵。牛顿的欧拉方程等都是为了更好地操控特种机器人而建立的动力学。
2 模糊神经网络理论研究
机器人系统功能多且复杂,对于各种生产运作过程中出现的一些问题很难控制。对此,模糊控制和神经网络相结合而成的模糊神经网络具备了解决一些问题的特别优势。模糊控制系统主要通过语言的描述控制机器人的运动,而语言描述能够充分地将专家的经验、知识转化为控制规则,模糊控制器由以下几个高功能的部分构成。
2.1 神经网络理论
用于控制特种机器人的神经网络是根据人类大脑的思维模式和构造而设计,其中,神经元是大脑组织、信息处理的基本单位,而人工制作的神经网络则会根据企业、国家、个人的不同需求进行设计和分类,前馈网络和递归神经网络是其中的两大类。前馈网络不但层次感强,其常用的感知器、月P网络也能非常有针对性地解决一些问题;递归神经网络包含积分、反馈等功能,反馈机制是其在信息传输中的一大特点。
2.2 模糊神经网络控制系统
系统的输入及各种运作实验证明:模糊系统与神经网络之间具有很多相似点,可以相互转化。模糊神经网络系统使其对数据的计算等更快并且更加正确,通过模糊控制也使其自身的容错力增强。模糊神经网络(FNN)模型的设计经过专家利用各种经验和知识的打造,能够更好地通过月P网络、建立样本等方式控制特种机器人的运作。
3 蚁群算法优化训练的模糊神经网络特种机器人控制
蚂蚁算法是模仿生物界中蚁群通过交流、协作、共同搜寻获取实物活动的仿生优化算法。在蚂蚁工作的过程中,他们通过一种“信息素”交流。
3.1 蚁群算法的本质
蚂蚁算法是通过分析、实践、探索蚂蚁群体活动得出的,是一种随机算法。蚂蚁算法分适应阶段和调解阶段,在这2个阶段中他们不断地优化自身的机构、积累需要的信息、寻求最佳解。蚂蚁算法中的人工蚂蚁不但有自组织性,还有协作、竞争的关系,在这过个程中,需要不断地协作、改进、更新。
3.2 蚁群算法优化模糊神经网络
蚂蚁算法具有全局优化的特点,可以有效地训练FNN,避免了月P的缺陷。它在模糊控制系统和神经网络系统结合后,不但提高了整体优势,也增加了一些功能和特点。这些优化的改变,使某些工作的计算更加便捷。同时月P的缺陷及一些神经网络系统无法解决的问题,它也能很好地解决。而蚂蚁算法通过蚂蚁群体机智有效的协作,总结并融合了一些思想,通过这些思想,特种机器人能够自我选择方便、快捷、有效的工作路径[1]。蚂蚁算法为进一步控制特种机器人提供了更加合理有效的措施,也优化了各种运作系统。
3.3 蚁群算法优化的结果
通过各种实验结果表明,蚂蚁算法优化的模糊神经网络系统更加稳定,也更加高效快速。通过实验比较发现:在普通的模糊神经网络中,把基本臂和期望主臂的轨迹长度比较后发现,被蚂蚁算法优化的模糊神经网络控制系统运行的轨迹更短效果更好更明显。
4 结语
随着人类文明的发展,机械的运用与不断的创新随处可见,这个时代对特种机器人的需求也在不断增加。而国内外对特种机器人的研发也在不断地创新和投入,对此,涌现了大批的类型、功能不一的特种智能机器人。被蚂蚁算法优化过的系统很好地解决了一些问题,能够全面地优化各个方面,这种算法,为人类更好地发展特种机器人研究机器人做出了巨大的贡献。
【1】耿东山.基于蚁群算法的机器人全局路径规划[D].郑州:郑州大学,2012.
Application of Ant Colony Algorithm in Intelligent Control of Special Robots
ZHOU Jun
(Huizhou Engineering and Technical School,Huizhou516000,China)
With the continuous progress of science and technology, domestic and foreign experts and scholars help each other to jointly build asmart robot. Fuzzy neural network theory own the induction and other capabilities, effectively help people to better control the robot. It has theability of self learning and association, and the fuzzy neural network theory optimized by ant colony algorithm can better control the special robot,and it can effectively deal with the random changes in the work.
special robot; ant colony algorithm; artificial intelligence control; fuzzy neural network
TP24
B
1007-9467(2016)12-0189-02
2016-09-29
周君(1979~),男,湖北洪湖人,讲师,从事计算机应用研究。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
导航定位学报(2022年2期)2022-04-11
小学科学(学生版)(2021年2期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
装备制造技术(2020年2期)2020-12-14
今日农业(2019年14期)2019-09-18
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
汽车实用技术(2017年16期)2017-09-21
农村百事通(2017年9期)2017-07-07