
室内外多维时空数据融合及其在PGIS中的应用
2017-01-06 03:32张春敏郭云嫣刘全海
测绘通报 2016年12期
张春敏,郭云嫣,刘全海
(1. 常州市测绘院,江苏 常州 213003; 2. 常州市地理信息智能技术中心,江苏 常州 213003)
室内外多维时空数据融合及其在PGIS中的应用
张春敏1,2,郭云嫣1,2,刘全海1,2
(1. 常州市测绘院,江苏 常州 213003; 2. 常州市地理信息智能技术中心,江苏 常州 213003)
全息位置地图由于其多时态、多主题、多层次、多粒度的信息特征,近年来结合公安警用地理信息系统(PGIS)领域开展了研究和应用。本文针对室内外一体化多维应用场景的特点,重点研究了室内外一体化多维时空建模的数据采集、数据融合和建模方法,提出了全息位置地图多维动态场景的构建技术;以公安部“新一代警用GIS关键技术及其应用”项目为背景,对常州城际火车站及周边进行了室内外多维时空数据融合建模,为新一代PGIS的位置地图建设提供重要示范。
全息位置地图;多维动态场景;数据建模;室内外集成
全息位置地图是以位置为基础,全面反映位置本身及其与位置相关的各种特征、事件或事物的数字地图[1-3],是近年学术界为了适应当下智能的位置服务需求而提出的一种新型地图产品,代表了未来数字地图的发展方向。其中,多维动态场景建模是构建全息位置地图的基础,且考虑到人类约80%~90%的时间处于室内[2],室内环境的多维动态场景建模更加迫切和重要。
室内外一体化多维时空建模是全息位置地图重要的研究内容,融合了二维与三维、室内与室外、静态与动态的多源信息,可有效支撑实景模拟,快速在线展示整个现实场景,进行室内外人员疏散和救援分析。
因此,室内外多维时空建模,在公安警用地理信息系统(PGIS)中得到越来越多的应用[3]。尤其是具有几何准确性和照片真实感的室内三维场景模型,在公共安全区域监控、突发事件应急响应等应用领域有着迫切的需求。
本文针对室内外时空对象数据与时空关系的特点,提出室内外多维时空建模的技术方法,创新性地提出用于描述室内外一体化的全方位、多层次、多粒度的全息位置地图的数据表示模型,在多源三维数据的汇集、室内环境高效建模等方面取得突破,有效解决了目前室内室外三维模型、泛在信息、全景地图、影像地图一体化整合的难题,为敏捷、精准的位置感知奠定基础。
一、室内外多维时空数据采集与建模
针对位置传感器种类多、分布广、信息来源多样等特点,研究位置传感网的定位信息及泛在信息的获取和动态接入技术;面向室内外一体的三维几何、语义、属性与时空关系,研究真三维全息位置地图的数据采集、整合与建模方法;以特定目标的三维空间位置为中心,研究多维时空数据的融合和动态更新技术。
室内外多维时空数据融合研究内容包括:静态场景数据(三维、全景、矢量、影像、拓扑等),并通过位置网获取大量动态感知信息(烟雾感应、动作感应、视频感知等),结合其他途径(如公安内部网络)接入的泛在信息,得到全方面、多层次和多粒度的目标信息。
室内外多维时空数据融合需要对室内外、地上下进行一体化建模。室外建模的研究已经非常广泛,应用非常深入。近些年来主要研究室内空间建模[4]和一体化集成。常用的室内空间建模方法依据技术原理可分为3种[5]:手工建模方法、基于图像的建模方法和基于激光扫描的建模方法。
1. 多维时空数据采集
主要研究地图场景相关信息的获取,并对其进行数据采集与处理,获取得到场景全方位、多层次和多粒度信息。在分析现有三维地理信息系统与全景地图数据采集和处理方法的基础上,结合LiDAR快速获取技术,联合多种采集设备(如LiDAR、Kinect、全景相机等),对复杂场景进行全方位的三维快速重建。
LiDAR能获取高精度、高密度的三维坐标点云数据和空间对象的深度信息,构建具有准确几何信息的三维立体模型[6],适用于室内较大范围的场景快速建模。但由于存在室内场景不规则对象之间相互遮盖、未知物体表面反射特性、室内边角对象无法实时获取、室内场景点层次多样、场景对象自身结构复杂等问题,直接利用LiDAR数据会在场景缺失的情况下出现模型孔洞和边缘失真等数据漏采和数据不完整的现象。
Kinect对小范围的场景能够进行持续扫描,实现由粗到细,提高三维重建精度,实现三维场景的快速更新,能够满足场景内部突发应急重点区域、人群密集区域、公共安全重点区域等的时效性要求。但由于噪声大、精度差等缺陷使得其在使用时存在重影难以消除等问题。
针对以上问题,考虑将LiDAR与Kinect设备相结合的方案,将两者获取的数据进行有效融合,从而为建立完整、真实的三维模型提供数据基础。
全景相机可在确定的场景点处获取满足精度要求的图像信息,构建图像金字塔模型并加以存储。结合全景相机可获取场景对象纹理信息这一特点,对前面获取的三维模型赋予相应的纹理信息,从而得到具有真实感的多层次、全方位、多粒度的三维全景地图。
2. 对多维场景蕴含的拓扑关系、方位关系、语义属性进行建模
在对地图场景进行数据采集时,紧急安全出口、重要目标对象和遮挡对象等数据的便捷采集,对场景对象的语义构建[7]、场景对象的碰撞检测、室内路线的规划有着非常重要的作用。
每一张场景图片都可能与潜在的矢量、点云、视频、图像等信息相关联。快速建立多源信息与场景图片的对应关系,可以使多个用户在协同办公时实时观察到最新的信息。针对来自现场采集的点云、视频、图像信息,需要根据空间点位信息筛选需要搜索的场景点,然后对选定场景点所包含的场景图片进行匹配。图1为信息层次关系图。

图1 信息层次关系
为了适应室内场景信息的快速搜索和匹配,需要建立层次性的存储模型。首先将室内场景按照房间和楼层进行分割,建立起室内各个区域间的拓扑关系,存储到空间数据库中。建立单独的数据表,存储具体区域中各个场景点的邻接关系和方位关系。对于区域出入口处,建立边界场景点之间的关系,存储到另外一张数据表中。在对场景进行搜索时,在区域内部直接搜索场景点的邻接关系,跨区域边界则联合多表进行查询。为了进行高效的搜索,在建表过程中需建立合适的空间索引以加速搜索效率。图2为室内外多维时空对象E-R模型。
场景对象的语义信息在内涵丰富、复杂的时空概念下还不能明确表达出其完整含义,需要综合利用本体[8]属性和原型或典型实例相结合的方法来表达,如对门窗等紧急疏散出口获取完整的语义信息可加快人员疏散速度,减少人员伤亡。
此外,矢量标注可方便检索到邻近的场景点信息,经过三维几何解算,利用矢量信息与全景图片所表达的空间场景的相交关系,变换处理得到与场景图片相融合的准确信息。开发整合拓扑关系、方位关系和语义属性的建模工具,研究保持三维对象几何一致性、拓扑一致性及语义一致性的校验方法,基于生成的三维全景地图,实现对三维全景数据的编辑与修改。
3. 对场景内动态目标的行为轨迹、形态变化、属性信息等进行建模
动态目标的行为轨迹受时空的影响,位置变化较大,如犯罪分子的可疑行为、作案现场物体的位置变化等,体现在三维全景地图中多表现为几何变形和对象随时间序列的变化。不同的时间,目标对象的属性信息也会发生一定的改变,这些信息可以通过传感网和Kinect进行实时获取,并对已有数据库进行动态更新,获取利于时空分析的动态模型。

图2 室内外多维时空对象E-R模型
4. 室内外多维时空数据的更新
对于矢量数据和三维模型数据,参考现有国内外增量更新的相关研究成果,利用版本机制,并结合数据查询和更新的特点,设计合适的数据更新策略,使用Oracle数据库建立起高效的数据更新架构。针对全景数据和实时数据流,根据NoSQL数据库的特点,设计相应的更新策略。针对实时数据流,结合视频、点云数据特点,通过数据检查机制和评价指标,将符合要求的数据动态更新入库。针对存储关联信息的图数据库Neo4j,建立数据增量更新策略,对实时数据流与其他各类数据的关系进行快速更新,并保持数据一致性。
二、案例与试验分析
1. 项目基本情况
随着“十二五”国家科技支撑计划“新一代警用GIS关键技术及其应用”的开展,相关单位共同开展“位置传感网与全息位置地图关键技术及其应用”课题研究。新一代PGIS的研究目标是突破大规模位置传感网多维、多源动态数据获取与整合,泛在空间信息融合集成与管理,全息位置地图建模与多维可视化,位置深度感知与时空关联等关键技术,研发全息位置地图与泛在空间信息智能服务平台,建立面向公共安全的典型区域示范应用系统。
在公安部门现有的三维警用地理信息系统[9]中,以公共大型场所(常州市城际火车站)为例,构建立体直观、室内外一体、地上地下一体的多维时空数据,并结合物联网,提供信息查询、统计分析、轨迹模拟、车辆跟踪、实时监控、工作预案、探头标注等各类服务。
2. 室内外多维时空场景建模
(1) 三维数据
按照城际火车站的基本对象组成进行创建[10],对于火车站内部,以每一楼层的功能区间(如一楼大厅、一楼卫生间、一楼值班室等)进行创建和分类;同时,对于外墙(特别是外墙的玻璃幕墙)需按照楼层为参照进行处理,即外墙需按照楼层进行切分处理,分为若干个(以楼层数为准)对象。
以一个简单的房屋模型为例,对构成房间(包含内外)的部件进行解释,如图3所示,典型的房间由屋顶、天花板、内墙、窗户、地板、底面、外墙、门和窗户构成。针对常州市城际火车站,包含的部件除上述部分外,还有障碍物、卡口、摄像头等。

图3 房间部件构成示例
室外建模:南广场和北广场范围内建筑、道路、地面建模,面积为153 246 m2。
室内建模:对候车室、售票厅、室内两层座椅、商铺及办公室等进行三维建模,面积为70 294 m2。
地下空间建模[11]:对地下空间的停车场、广告牌、变电室、商铺及附属部件等进行三维建模,面积为306 492 m2。
具体模型实例如图4—图6所示,精度指标见表1—表3。

图4 火车站北广场室外模型

图5 火车站出口地下模型

图6 火车站室内大厅及摄像头模型
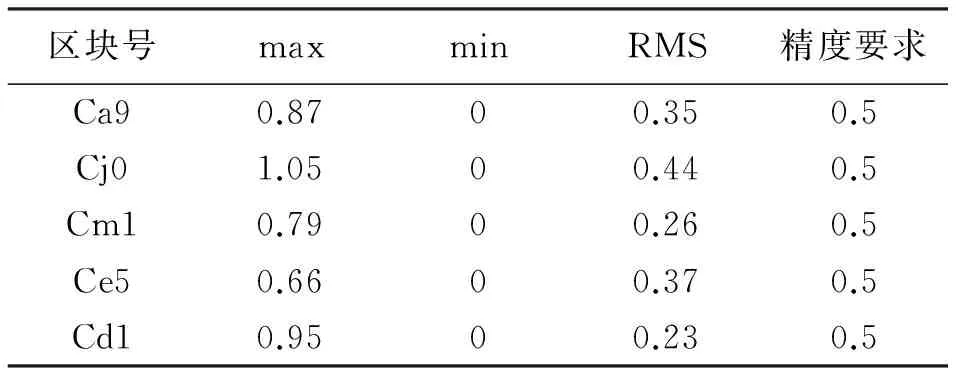
表1 平面精度指标 m
(2) 点云数据
利用激光扫描仪快速采集室内点云信息,其具有三维空间坐标,可以快速构建立体模型。如图7所示。

表2 高程精度指标 m

表3 建筑高度精度指标 m
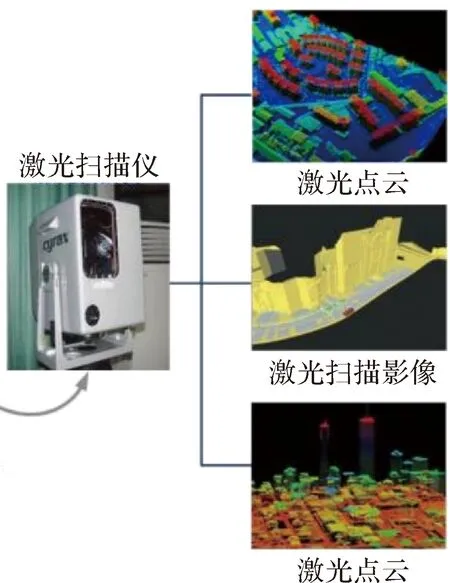
图7 研究区域点云数据
(3) 全景数据
室内全景信息要求对室内信息进行全方位感知。目前,已有的室内数据采集平台多针对室内的三维场景建模,而并不关心影像的深度信息、属性信息等。因此,为全面获取室内泛在信息,试制了专门的室内三维全景影像数据采集平台,需要高清全景相机1台、室内轻便型激光扫描仪2台(360°全景信息获取),主要用于室内三维影像数据的采集,包括室内场景的深度信息、属性信息,并具备实时可视化监测与姿态调整等功能。
(4) 视频数据
对视频摄像头位置信息进行提取,包括摄像头ID、名称及在室内的相对空间坐标位置,见表4。
(5) 轨迹数据
针对在公共安全突发事件中获取的实时数据流,根据矢量标绘数据,快速搜索三维地图数据库和全景图片数据库中相关的模型与场景数据,建立关联关系。如图8所示。

表4 视频摄像头位置信息

图8 日常巡控
3. 在PGIS中的应用
室内外多维时空数据作为全息位置地图示范系统的基础支撑,在警务信息的三维可视化展示、指挥调度、日常巡控等警务实战场景中推广应用,有效地辅助公安部门的日常安全管理及事件应急响应工作,提升了公安机关核心战斗力。
(1) 地图浏览
对火车站室内室外、地上地下进行多维真实场景的浏览再现。
(2) 信息查询
提供各类信息分类查询,如行政区划、社区、道路、单位、门牌号、案件、人员、治安卡点等。在大型公共场所突发紧急情况下,可利用人员信息查询功能提供人口流动轨迹信息,从而跟踪人口流动的情况。
(3) 统计分析
主要用于自定义区域范围内的信息统计,如应急区域周边的人口信息统计、突发案件辐射区域的相关信息统计、重点人员聚集区域的信息统计等,从而针对性地制定治安防控方案。
(4) 轨迹模拟
可以实现案件、车辆、重点人员等的轨迹叠加分析,指挥部门可动态模拟某犯罪嫌疑人或劫持车辆的逃离路线和速度,也可模拟一组人员的流动轨迹,形象直观地辅助公安人员科学决策。
(5) 三维预案
针对基于纸质地图制作的传统工作预案不直观、布控信息量少的特点,基于室内外多维时空数据融合的全息位置地图,工作预案的模拟使制定者和执行者能直观地了解多维场景中警员、车辆的模拟配置情况,找出布控盲点,在盲点处布设相应的警力设备。
(6) 实时监控
将火车站等大型公共场所的视频监控、值班室视频、重点区域的视频与全息位置地图融合,便于指挥人员查看实时监控信息,在远程实时监控的基础上,准确判断实地真实情况并决策调度。如图9所示。
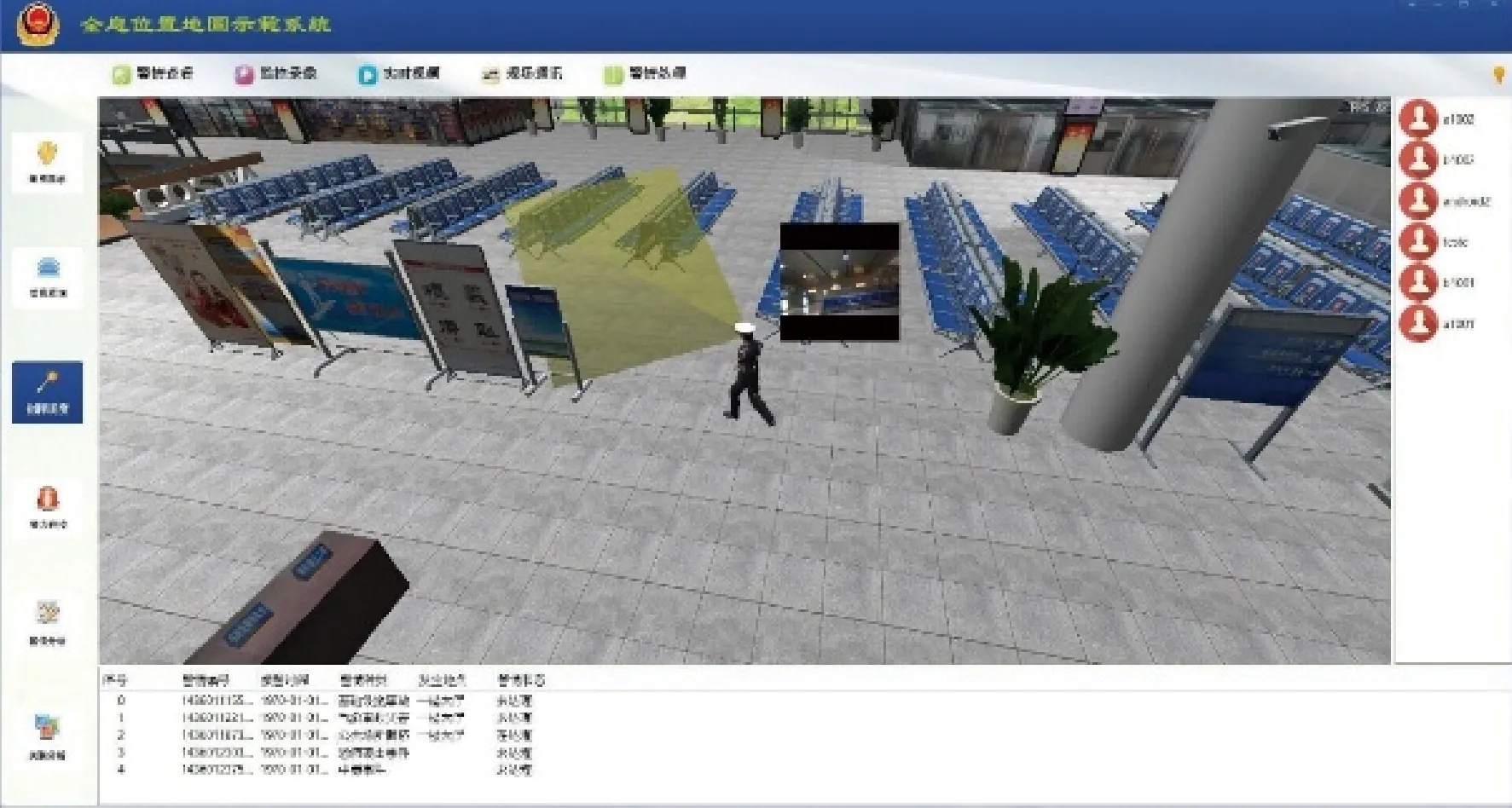
图9 实时指挥调度
三、结束语
在泛在网环境下,以位置为纽带动态关联事物或事件的多时态、多主题、多层次、多粒度的信息,提供个性化的位置及与位置相关的智能服务平台,是地图发展的必然趋势。室内外多维时空数据融合建模既克服了传统地图多是服务于室外空间,难以满足室内活动需求的缺陷,又实现了室内外一体化表达的应用要求。同时,基于此构建的全息位置地图提供了一个综合利用各种信息的平台,自适应地满足用户需求,实现了泛在空间信息的智能服务。
本文以信息共享和综合利用为目标,研究基于公安信息的室内外多维时空数据融合,实现可视化查询和分析,提高指挥决策、快速反应、反恐等方面的综合能力,为治安管理、警力部署、巡逻布控、安全警卫等公安业务提供行之有效的管理手段。
[1] 周成虎.全息地图时代已经来临——地图功能的历史演变[J].测绘科学,2014,39(7):3-8.
[2] GOODCHILD M F.Looking Forward Five Thoughts on the Future of GIS[EB/OL].[2016-05-17].http:∥www.esri.com/news/arcwatch/0211/future of gis.html.
[3] 朱欣焰,樊亚新,胡涛,等.全息位置地图:以位置为核心实现空间信息的动态关联与智能化服务[J].海峡科技与产业, 2014(10):87-91.
[4] 林雕,宋国民,贾奋励.面向位置服务的室内空间模型研究进展[J].导航定位学报,2014,2(4):17-26.
[5] 唐相桢. 面向城市设计的参数化三维建模方法初探[J]. 城市勘测, 2014(3):72-74.
[6] 高志国,李长辉. 基于地面LiDAR的三维竣工测量方法研究[J]. 城市勘测, 2014(3):31-33.
[7] 黄亮.面向多源位置信息的语义位置建模与计算研究[D].武汉:武汉大学,2014.
[8] 朱欣焰,杨龙龙,呙维,等.面向全息位置地图的室内空间本体建模[J].地理信息世界,2015,22(2):1-7.
[9] 邓淑丹. 三维警用地理信息系统应用[J].测绘科学,2014,39(1):74-77.
[10] 张寅宝,张威巍,张欣.建筑物室内空间建模研究综述[J].地理信息世界,2014,21(5):7-12.
[11] 冉慧敏,刘全海.基于规划核实的地下建构筑物三维建模方法[J].城市勘测,2014(6):17-26.
[12] 周成虎,朱欣焰,王蒙,等.全息位置地图研究[J].地理科学进展,2011,30(11):1331-1335.
[13] 朱欣焰,周成虎,呙维,等.全息位置地图概念内涵及其关键技术初探[J].武汉大学学报(信息科学版),2015,40(3):285-295.
Spatial-temporal Data Integration of Indoor-outdoor Multi-demensional Dynamic Scenes and Its Application in PGIS
ZHANG Chunmin,GUO Yunyan,LIU Quanhai
2016-06-17
国家十二五科技支撑项目(2012BAH35B00;2012BAH35B03);住建部科学技术项目计划(2013-S5-4)
张春敏(1981—),女,硕士,高级工程师,主要研究方向为城市三维建模、虚拟现实等。E-mail:7402619@qq.com
张春敏,郭云嫣,刘全海.室内外多维时空数据融合及其在PGIS中的应用[J].测绘通报,2016(12):100-104.
10.13474/j.cnki.11-2246.2016.0411.
P208
B
0494-0911(2016)12-0100-05
猜你喜欢
军事文摘(2022年8期)2022-05-25
四川党的建设(2022年8期)2022-04-28
娃娃乐园·综合智能(2021年2期)2021-03-10
家庭影院技术(2020年11期)2020-12-28
小学生学习指导(低年级)(2020年11期)2020-12-14
少儿美术(2019年11期)2019-12-14
作文大王·低年级(2018年10期)2018-12-06
英美文学研究论丛(2018年1期)2018-08-16
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05
