智能化转速表校准方法
2017-01-04 10:01刘新兰奇瑞汽车股份有限公司
上海计量测试 2016年6期
刘新兰 / 奇瑞汽车股份有限公司
智能化转速表校准方法
刘新兰 / 奇瑞汽车股份有限公司
介绍了通常用于发动机转速性能测试的智能化转速表的工作原理和信号处理电路,研究了智能化转速表传感器输入的脉冲信号与显示转速的对应关系,提出了智能化转速表校准方法,并通过校准实验验证了校准方法的有效性。
智能化转速表;校准
0 引言
在发动机研发和生产领域中需要进行大量的发动机性能测试,转速是测试的一个主要参数。上海内燃机研究所生产的各种型号智能化转速表可对此参数进行测试。
以前智能化转速表在国家规定的计量测试单位无法进行量值溯源,均送往厂家进行检测,而目前厂家已不对客户开展此项服务。为确保智能化转速表的量值溯源及测试数据的准确可靠,本项目研究此类设备的工作原理,建立设备的校准能力。校准方法:用一台经过量传的信号发生器模拟传感器信号输入智能化转速表。将此信号通过智能化转速表处理器运算得到的理论标准信号值与智能化转速表显示的值进行对比,得到智能化转速表的示值误差。
1 智能化转速表工作原理及信号处理电路分析
智能化转速表接收霍尔传感器的信号,将此信号进行处理后得到并显示被测设备的转速值。
1.1 传感器原理
霍尔式传感器工作原理如图1所示。使用时应在被测量转速的轴上装一齿轮,将传感器安装在支架上,调整传感器与齿轮顶之间隙为1.2 mm左右。当轴带动齿轮旋转时,根据电磁感应的原理在传感器内部线圈的两端产生一个脉冲信号,被测轴转动一圈产生Z个电压脉冲信号。通过式(1)计算可将被测轴的转速n转换为频率F的电压脉冲信号。

式中:F——频率,Hz;
n——被测轴转速,r/min;
Z——齿轮齿数
当齿轮齿数为60时,电压脉冲信号的频率F即等于被测轴的每分钟转速n。
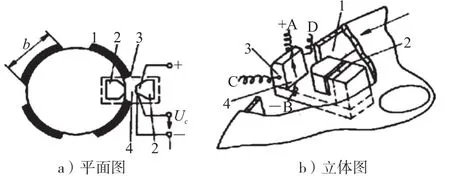
图1 霍尔式传感器工作原理
1.2 信号处理电路
智能化转速表的信号处理电路工作原理见图2。
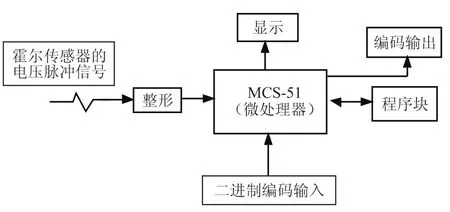
图2 MCT系列智能化转速表信号处理电路工作原理
MCT系列智能化转速表的信号处理电路主要由MCS-51单片微处理器和74LS系列集成电路等部分组成。它是将磁电转速传感器接收到的脉冲信号转化为所需要转速信号的一种测试设备。将脉冲信号输入MCT系列智能转速表,信号经过整形,采用单片微处理器和74LS系列集成电路,同时结合计算机软件技术就可以测量出发动机的转速。
通过研究,智能化转速表传感器输出的电压脉冲信号频率与显示转速的对应关系见表1。

表1 频率与转速对应关系表
2 校准方案设计及实际校准
2.1 校准方案设计
智能化转速表技术参数为:示值误差不超过±(0.1%FS+1个字)。根据传感器原理和信号处理电路的分析可以推出,霍尔传感器的输出信号为频率信号,此信号可以用一个标准信号发生器替代作为标准源,而被检设备的示值误差就是与此标准信号进行对比后得出。校准原理框图如图3所示。

图3 MCT系列智能化转速表校准原理
2.2 校准方法及校准数据
通过研究智能化转速表的工作原理,了解其技术参数及接线柱定义,校准需配备频率信号发生器、绝缘电阻表等设备。
2.2.1 检测设备
智能化转速表实验室校准所需要的检测设备及其技术性能如表2所示。

表2 检测设备
2.2.2 测试方法
1)示值误差校准
(1)校准前,被校设备、标准仪器预热时间不少于30 min。
(2)根据被测智能化转速表的型号进行频率信号输出,智能化转速表频率与转速的换算系数见表1。
(3)选取8个校准点进行校准:800 r/min、2 000 r/min、3 000 r/min、4 000 r/min、5 000 r/min、6 000 r/min、7 000 r/min、8 000 r/min。
(4)分别读取多功能校验器中的频率示值和被检设备示值,并记录在对应的表格中。
(5)数据处理
智能化转速表示值误差δ按式(2)计算:

式中:X ′——被检智能化转速表示值;
X——多功能校验器的频率示值;
C——智能化转速表频率与转速的换算系数
在校准示值误差的同时观察仪表的显示能力,应无叠字、不亮、缺划等现象,并能连续变化。用绝缘电阻表测试被校准仪器输入与电源端子相互之间的绝缘电阻,不应低于20 MΩ。
2)校准数据
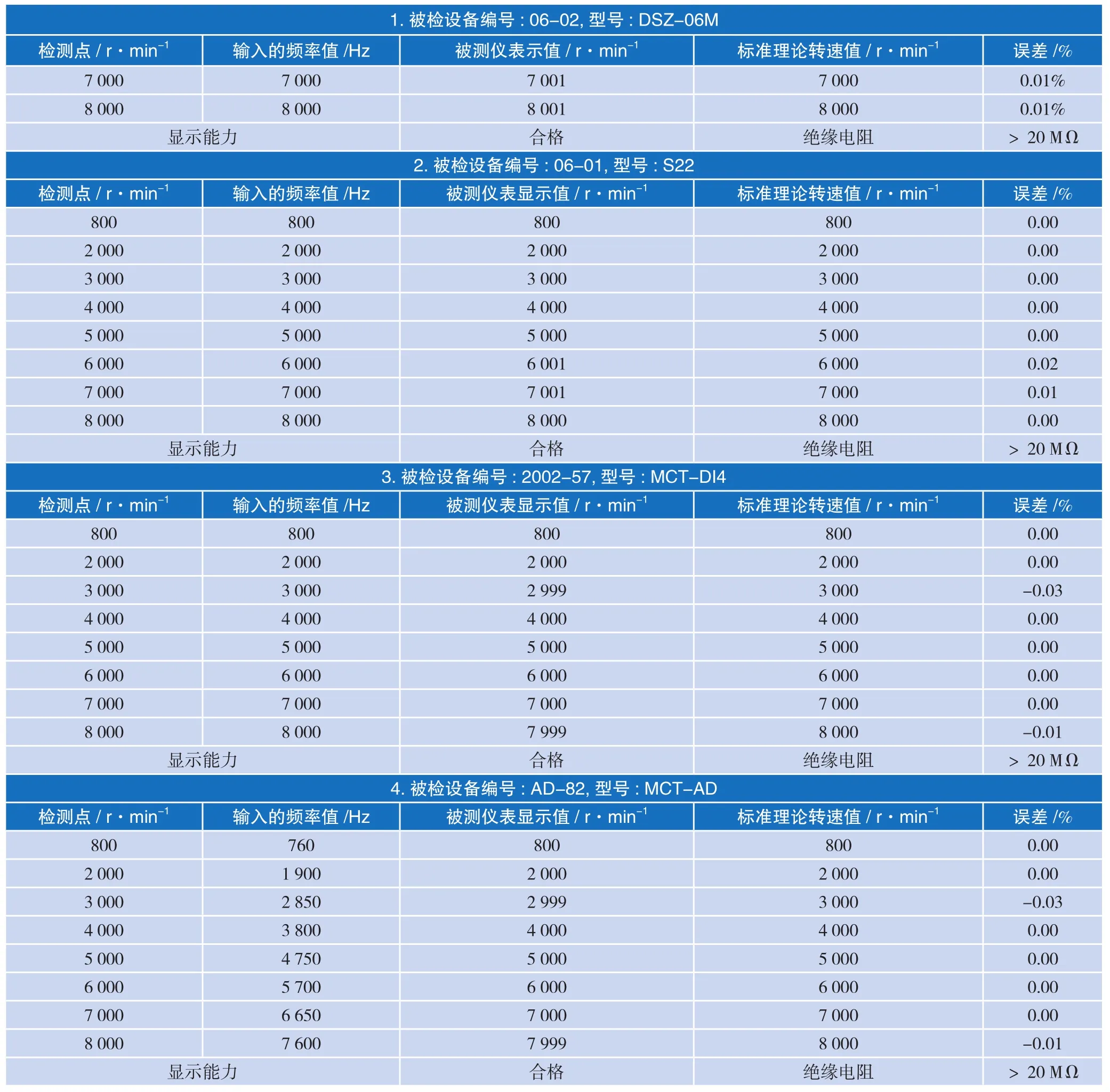
选取四种型号的智能化转速表,按上述方法进行校准。标准器:示值误差和显示能力校准:多功能校验器,编号:1419001,型号:5520A,厂家:FLUKE,测量范围:0.01 Hz ~ 2.0 MHz,最大允许误差:±0.02%;绝缘电阻校准:绝缘电阻表,编号:4-0447,型号:ZC25B-3,厂家:上海精科天平仪器有限公司,测量范围:直流电压500 V,准确度等级:10级。四种型号的智能化转速表校准结果如表3所示。
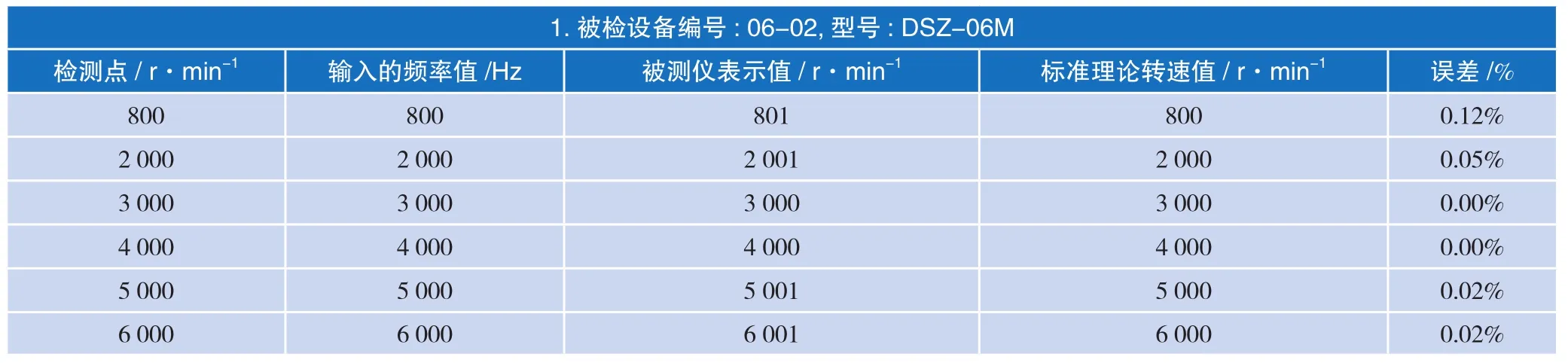
表3 校准结果
2.3 校准结果及方案可行性
从校准结果可以看出,此四种型号的设备满足被测设备最大允许误差为±(0.1%FS+1个字)的技术要求。同时校准结果表明,该校准方案是可行且合理的。
续表3
3 结语
国家计量检定规程JJG 105-2000《转速表检定规程》不适用于智能化转速表的校准。本文研究转速表前端输入信号的特性及信号输入到转速表后的处理方法,提出一种适用的校准方法。经过技术分析和方法验证,该方法可靠性好,操作性强,可对智能化转速表进行量值溯源,同时该方法为一些特殊检测设备的量值溯源提供了一个检测思路。
[1]蔡美玲,张为民.MCS-51系列单片机系统及其应用,2版[M].北京:高等教育出版社,2004.
[2]于炳亮.电机转速测量方法研究[J].山东科学,2005(05):74-78.
[3]牛洁,周静,苟娜.基于霍尔传感器的直流电机转速测量系统设计[J].电子测试,2008(05):78-80.
Calibration method of intelligent tachometers
Liu Xinlan
(Chery Automobile Co.,Ltd.)
This paper introduces the working principle and signal processing circuits of intelligent tachometer which is usually used to test the rotate speed performance of engines, and studies the corresponding relations between the sensor’s input signals of intelligent tachometer and displayed speed values, meanwhile presents a calibration method.Experimental results verify the effectiveness of the method.
intelligent tachometer; calibration
猜你喜欢
军事文摘(2022年19期)2022-10-18
机械工业标准化与质量(2021年7期)2021-10-12
印刷工业(2020年4期)2020-10-27
保健医苑(2020年1期)2020-07-27
数学物理学报(2019年1期)2019-03-21
质量技术监督研究(2018年1期)2018-03-26
中国公路(2017年11期)2017-07-31
中国交通信息化(2017年4期)2017-06-06
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
高师理科学刊(2016年8期)2016-06-15