
基于Modbus的船舶配电监控系统的设计
2017-01-04 08:48周颖,谢明
制造业自动化 2016年12期
周 颖,谢 明
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于Modbus的船舶配电监控系统的设计
周 颖,谢 明
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对船舶配电系统的监测问题,采用监控通讯寻址方式,设计一种基于Modbus和TCP/IP协议,以多种电力测量仪表、高集成数字控制设备及计算机为核心并通过开发模块化程序进行设备间通信船舶配电监控系统。详细介绍了各模块的工作原理和软硬件设计。实际应用表明所设计的系统实现了船舶配电系统的发电机继电保护、功率管理,系统安全报警和远程控制等功能,与传统的船舶配电监控系统相比,降低船舶设计项目成本,提高了系统的安全性和实时性。
Modbus协议;RS485网络;人机界面;船舶配电系统
0 引言
伴随着船舶向大型化、自动化方向发展,已逐步形成集可视化监控、自动化控制和能耗高效管理于一体的协同自动化配电系统,即船舶功率管理系统(PMS)[1]。其中,发电系统的智能管理及其相关信息的协同与监控为保证船舶安全,持续,高效供电的保证[2]。船舶配电监控系统起的作用不仅限于主站触摸屏对从站控制设备的监控、同步报警、数据分析等直观功能,最重要的是简化了船舶配电系统中发电机及其控制设备构成的功率管理系统(PMS)的上位机-报警管理系统(AMS)对寻址结构的优化。以四台发电机构成的船舶配电系统为例,在没有监控系统的情况下,上位机报警AMS系统对功率管理系统PMS的寻址是直接的且必备厂家负责,PMS负责厂家必须提供为AMS负责厂家逐一提供具体单个设备寄存器地址,这将会增加整个项目的成本。 在有监控系统的情况下,HMI触摸屏在通信网络起着衔接桥梁的作用。在监控中作为上位机的HMI触摸屏则在与上位报警管理系统构成的通讯网络中作于下位机。上位控制系统所需数据则可以先通过触摸屏,以中间枢纽采集后,再构成与上位控制主系统的通信[3]。这样的结构极大简化了寻址过程,同时还增加了不同项目寻址信息的可移植性。在多个触摸屏构成的监控系统中,可将各屏之间通过工业以太网Modbus TCP/IP。本文设计了一套基于Modbus协议的船舶配电监控系统,系统控制主站集中管理大量Modbus协议采集设备,避免连接采集设备而大量布线,且兼容性好、实时性高、可靠性强,使用方便,从而降低了船舶项目设计成本,并且传输速度快,安全性高。
1 系统结构设计与工作原理
基于Modbus协议的船舶配电监控系统结构如图1所示。该系统主要由上位机管理系统、下位机控制系统、网络传输系统组成。上位机管理系统由工控机和触摸屏构成,下位机控制系统由继电器控制保护模块构成。该系统主要通过信息采集设备采集船舶电站的电量参数和运行状态,再将信号和数据处理并封装成标准串口Modbus协议帧,通过络传输进行数据交户,在触摸屏的控制下,通过Modbus将各监控数据进行分析处理和显示,从而实现对船舶发电机继电保护、发电机功率管理、安全报警等功能。
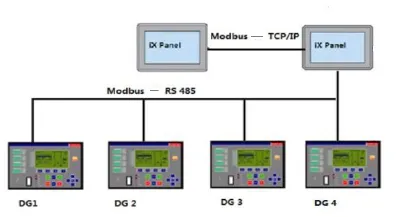
图1 系统结构
2 系统硬件设计
系统硬件分为继电控制保护模块和HMI模块,下面对这两部分硬件进行设计。
2.1 继电控制保护模块
该模块为德国Stucke Eletronik公司生产的SYMAP继电控制保护模块,如图2所示。该设备内部集成的PLC电路可以实现单个控制功能的锁定。所有数字量输出和模拟量输出都经由SYMAP控制单元处理控制,这样可以确定数据的统一性以及提升了灵活性[4]。此外,SYMAP控制器还提供了不同的通讯协议供主控制系统与SYMAP的通讯。这些模块彼此独立,针对各自控制的电机或开关进行继电保护,功率负荷分配,自动/半自动控制调整等举措,监控对象的实时报警;彼此之间可进行网络通讯,通过CANBUS完成内部广播,实现备机优先级选取的功能,图3为SYMAP的端口图。
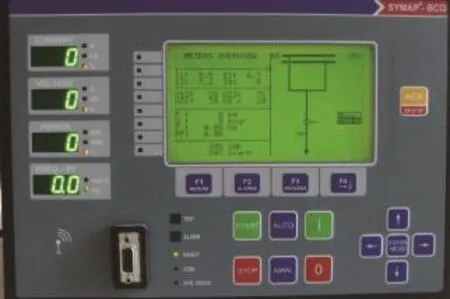
图2 SYMAP界面

图3 SYMAP 端口
2.2 HMI模块设计
该模块为瑞典Beijer Eletronics公司生产的iX T10A触摸屏,通过Modbus通讯协议与下位机设备互联,并以固定的轮询时间对下位机寄存器进行寻址,完成对发电机状态的显示,参数修改,报警同步等功能[5]。发电机的状态包括电压,电流,频率,功率等用电参数;以及所处状态的自动控制,远程控制,半自动控制。参数修改包括对发电机备机优先级选取的调整,发电机的紧急通断。报警同步能将各个下位机的报警信息及时上报上位机,这样协同能够使操作人员及时了解报警出现的时间与位置。
3 系统软件设计
3.1 Modbus通讯设计
Modbus协议被广泛的应用于工控领域中,根据网络实现上的不同,常见的有基于以太网络的Modbus/ TCP协议、基于串行口的ModbusRTU/ASCII协议[6]。由于相比较于RS232有诸多优点,工控现场多数采用RS422/485物理网络。
Modbus协议定义了一个与基础通信层无关的简单协议数据单元PDU。特定总线或网络上的Modbus协议映射能够在应用数据单元ADU上引入一些附加字段。Modbus的ADU单元由主站创建,其中功能码指示从站将执行的操作。功能码字段由一个字节编码,即有效范围为十进制的1至255。Modbus的传输方式分为RTU(远程终端单元)及ASCII码单元。Modbus帧格式如图4所示。
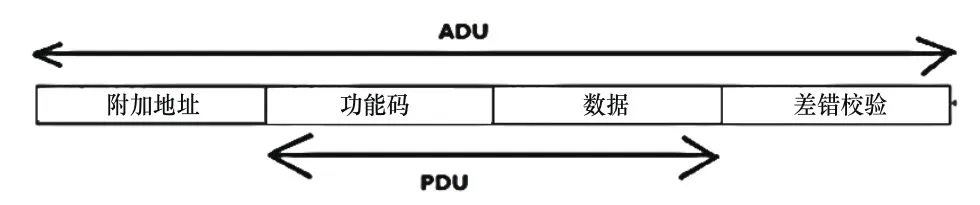
图4 Modbus帧格式
3.1.1 Modbus在链路层上的实现
Modbus串行链路协议是一个主-从协议,在一个通信网络中只有一个主站,它向每一个从站发出显示命令并处理响应[7]。在同一时刻,一个主站最多可以和247个从站连接串行总线上。采用查询、应答的方式进行通信,主设备向从设备发出消息,从设备响应消息查询,每个从机具有唯一的地址码在物理层,可用RS-232或RS-485作为传输接口。主站用单播模式或广播模式两种模式向从站发出请求。
设计中iX触摸屏为主机,SYMAP作为从站。标准的Modbus协议有两种传输方式:ASCII模式和RTU模式。前者用于通信数量少而且主要是文本的通信,后者用于通信数据量大而且是二进制的通信[8]。在同样的波特率下,RTU模式传输的字符比ASCII模式多,因此在设计中网络物理层采用的是RS485网络,使用Modbus-RTU协议。ModbusRTU帧格式如图5所示。

图5 ModbusRTU帧格式
3.1.2 Modbus协议在TCP/IP上的实现
在TCP/IP上使用一种专用报文头来识别Modbus应用数据单元,这种报文头为MBAP报文头,本设计中是通过协议标识符的值为0识别Modbus协议,Modbus TCP/IP帧格式(ADU)如图6所示。
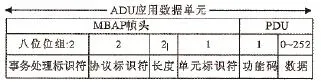
图6 ModbusTCP/IP帧格式
3.1.3 Modbus在SYMAP中的通讯实现
SYMAP设备在Modbus通信协议中支持功能码03和功能码06。
1)功能码03读输出寄存器。此功能使主站能够读取从站的输出寄存器地址。输出寄存器包括测量装置状态信息和测量值。对于每个请求,寻址过程允许接受最大到124个寄存器(16位)。功能码03的请求帧格式和功能码03接收帧格式如图7所示。
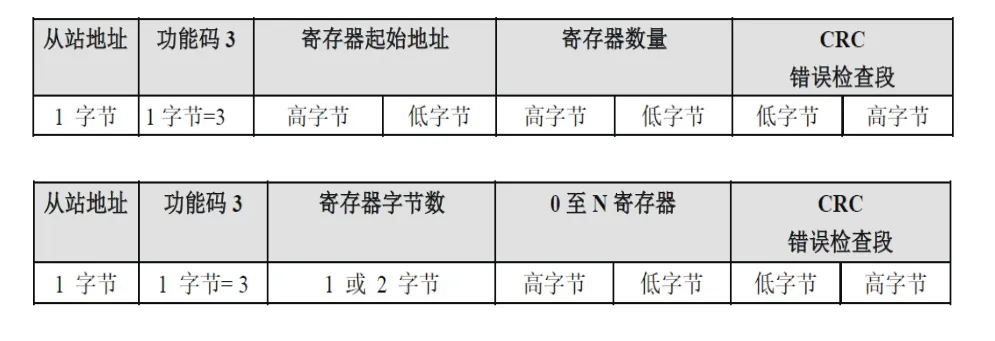
图7 功能码03的请求帧格式和接收帧格式
2)功能码06写单个寄存器。对于主站而言,此功能实现了指令的输出和下位机设置的改变。根据Modbus协议,该设备等待以下查询,一个命令只能通过查询被送出。作为反映,设备会对主站请求反馈。主站可以发出一个收集模式(从站地址=0),在这种情况下,所有从站设备将输出所需命令,但从站不发出反馈信息,就是之前所提到的广播模式。功能码06的请求帧格式如图8所示。

图8 功能码06的请求帧格式
3)寄存器地址查询。在上位机设备对SYMAP设备进行特定地址寻址时,只需将匹配的寄存器地址以规定的格式给出,即可完成对设备特定信息值的信息采集。如表1所示,为部分寄存器地址。其中,寄存器地址134表示发电机电流,138表示母排电压,139表示母排功率,144表示电机转速等信息。
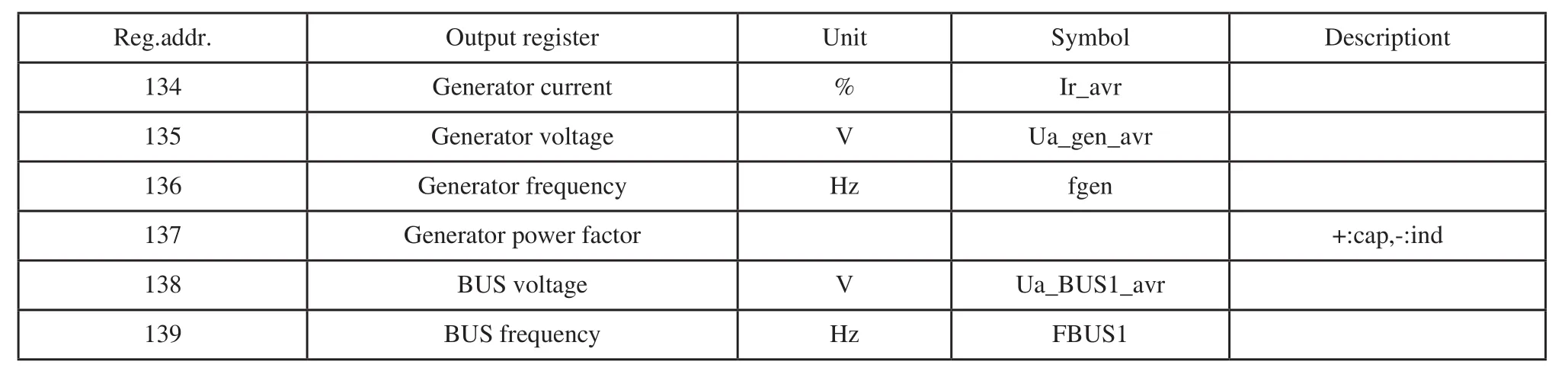
表1 部分寄存器地址说明
3.2 SYMAP的重载问询
重载问询管理,即当有一个用电需求较大的负载请求并入电网时,设备采取启动备机或是拒绝的职能管理、黑牌处理(在船舶出现紧急供电故障时的处理)、轻载减负管理(当有多台发电机同时运行,而实际电网负荷远低于发电机额定值时,采取将优先级较低的电机脱离电网的省电处理)。如图9所示,“Bow Truster”用电设备的重载问询流程图举例,在联络开关合闸且电站模式为自动的情况下,考虑发电机机组的功率是否大于560kW,若满足,则运行允许;否则进入启动备机预案,将备机启动后的并网处理,增大电网中带负载能力,满足用电设备的用电需求。若备机数为零,则重载请求失败,“Bow Truster”不被允许。

图9 重载问询流程图
3.3 监控系统HMI开发
该触摸屏内置预置元件,可以通过调用,自动生成Xaml代码,再通过修改代码值,改编元件属性,触发动作或匹配变量。对于设备不具备的元件,可以通过编写Xaml代码进行创建。监控的总界面如图10所示。
以发电机为1部分变量为例,如表2所示,描述了变量定义格式,DG1_C,DG1_V,DG1_P,DG1_F定义为发电机1的电流,电压,功率,频率。DG1_A1-A4分别表示编号1~4的报警,BUS_V为母排电压。该格式各三块构成变量(Tag),控制器(Controllers),数据交换(Data Exchange)。信号的采集在于从控制器端得到数据,再赋值入Tag中。所以,方向是由控制器到变量(Right),当数据变化时,传递数据。1:40135表示寄存器,1表示发电机1的从站地址为1,135表示寄存器地址。
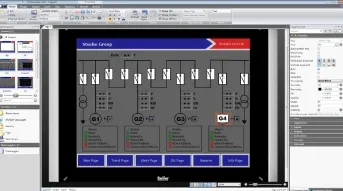
图10 上位机监控界面

表2 发电机1各参数变量说明
4 测试
目前该系统通过测试,已应用到西门子船舶设计项目中。实际运行结果表明:高集成度的SYMAP控制模块实现准确采集各配电参数,同时网络通讯传输无误;监控系统能够实时接受现场各从站节点发送的配电数据,并建立数据库供操作人员进行历史查询。
5 结论
由于该系统使用集成度较高的继电控制保护模块,与传统的监控系统相比,避免了大量布线和可靠性低的缺陷,提升了系统的实时性、稳定性和灵活性。因而提高工作效率,有效预防设备及电力事故,保证船舶航行安全。
[1] 叶继英.基于PLC的船舶电站自动化监控系统的研究[J].科技信息,2010(10):137-138.
[2] 施伟峰,包艳,周左晗.电力推进船舶电力系统多功能故障监视报警装置研发[J].电测与仪表,2015,25(3):82-87.
[3] 郑小倩.基于工业以太网的实时监控系统通信设计[J].微计算机信息,26(7):82-84.
[4] Beijer Electronics iX Developer UserManual (iX Panel Dokumentation)[R].
[5] SYMAP_A1_Communication_E_v2.1 (SYMAP Dokumentation) [R].
[6] 华镕.从Modbus到透明就绪[M].北京:机械工业出版社,2008.
[7] 王书根,王振送,刘晓云.Modbus协议的RS485总线通讯机的设计及应用[J].自动化与仪表,2011,26(5):25-28.
[8] 蔡文礼.船舶自动化中MODBUS通讯应用实例分析[J].船舶工程,2015(S1):178-181.
Design of monitoring system of ship distribution based on Modbus
ZHOU Ying, XIE Ming
TP274
A
1009-0134(2016)12-0121-05
2016-09-09
周颖(1983 -),女,浙江宁波人,硕士研究生,主要从事电力电子与电力传动研究。
猜你喜欢
故事作文·高年级(2021年12期)2021-12-21
计算机应用(2020年5期)2020-06-07
装备制造技术(2019年12期)2019-12-25
电子制作(2019年7期)2019-04-25
计算机研究与发展(2019年4期)2019-04-18
电子制作(2018年19期)2018-11-14
知识就是力量(2018年7期)2018-07-11
电子技术与软件工程(2018年1期)2018-03-22
军事文摘(2016年16期)2016-09-13
智能建筑电气技术(2015年5期)2015-12-10
