GPS/INS组合导航在输电线路巡检中的应用
2016-12-30 02:24:33孟祥萍苑全德皮玉珍
自动化仪表 2016年12期
孟祥萍 寇 磊 苑全德 皮玉珍
(长春工程学院电气与信息工程学院1,吉林 长春 130012;东北电力大学信息工程学院2,吉林 吉林 132012)
GPS/INS组合导航在输电线路巡检中的应用
孟祥萍1寇 磊2苑全德1皮玉珍1
(长春工程学院电气与信息工程学院1,吉林 长春 130012;东北电力大学信息工程学院2,吉林 吉林 132012)
针对输电线路常规人工巡检耗费时间、人力成本增加的问题,采用无人机作为载体,减少了时间及人力成本。无人机使用地面站软件配合GPS/INS进行预设巡检路线,并能在巡检过程中进行实时监测。提出了基于卡尔曼滤波器和双闭环PID控制相结合的方法,以卡尔曼滤波器抑制噪声干扰;在双闭环控制中,采用内环调节速率、外环控制无人机姿态,从而有效防止了因无人机抖动导致的飞行失控,完成了常规巡检工作。
GPS/INS 嵌入式技术 电力系统 无人机 实时监测 卡尔曼滤波器 PID 巡检
0 引言
在大部分山区、高原及环境恶劣的地方,输电线路巡检工作依靠人工完成,费时费力,同时还很难发现事故的隐患。无人机以其低成本、高效率、省时省力以及不受地形环境限制的特点,正逐渐在电力巡检方面代替人力[1]。
近年来,随着嵌入式技术的迅猛发展,采用无人机作为载体来完成输电线巡检已成为可能。飞行控制技术是无人机的核心部分,其实现了对无人机整个飞行过程的控制,完成了传输数据、实时控制等功能。无人机使用GPS/INS组合导航方式,GPS导航可以为INS导航提供实时的数据刷新,防止无人机偏离方向。无人机采用NuttX操作系统,其具有实时性、高可靠性、标准兼容性、小型封装以及从8位到32位微控制器的高度可扩展性等特点,可以成为无人机的控制操作系统部分,使无人机的飞行控制具备硬实时性、高精度、智能化、网络化等特点。
在无人机的控制算法中,数字PID控制被普遍采用。本文采用卡尔曼滤波器与双闭环PID控制算法相结合的方法,控制时间短,没有出现超调和波动现象,提高了无人机抗干扰以及防抖动的能力,可以有效提高巡检作业的效率和质量,很好地提升了电力行业生产自动化水平和能力,创造了良好的经济效益。
1 无人机研究现状
国内外无人机目前主要应用于军事方面,民用无人机还处于初级阶段,可开发和应用的领域非常广阔。
在民用方面,无人机在地图测绘、地质勘测、灾害监测、气象探测、空中交通管制、边境控制、通信中继、农药喷洒等领域的研究和应用得到了不断的发展和进步。各领域的作业要求不同,如进行国土测绘与对海洋、高压线路、灾情及气象等进行监测,因此对无人机技术的要求是不一样的。无人机在海洋区域监测需要的抗风能力要高于高山地区;气象监测要求无人机进到台风眼中还要能够安全返回;对灾情进行监测回传的遥感信息图像只需要能够看清地面的所有物品就行了;而监测输电线路就必须能够看清线上的细节。国内的民用无人机当前应用比较多的还是低空遥感测绘无人机,以其被列入国家测绘局十二五规划而推进、推广力度加大。
随着电力系统等级的不断提高,巡检范围不断扩大。此外,还有一些地形复杂地区的巡检任务难以即时发现,输电线路巡检的成本不断提高,依靠人力完成巡检已经不再是一种明智的选择。随着无人机续航时间和抗风能力的增强,且具有搭载光学任务系统吊舱的能力[2],为输电线路巡检提供了新的有效解决方案。和人工巡检相比,无人机巡检具有巡检时间短、质量高、成本低、风险低和机动性强等特点。
飞行控制系统是无人机的核心[3],文献[3]中提到了很多关于无人机控制的经典算法,其中包括反步控制、滑模变结构控制等。反步控制系统应用于无人机控制,具有稳定性较高、误差收敛速度快的优点,但其鲁棒性以及作动器的速率和位置饱和问题依然存在。滑模变结构控制的响应快,但是当状态轨迹到达滑模面后,很难沿着滑膜面向平衡点移动,只是在滑模面两侧来回穿越,会产生抖动现象,导致无人机失控甚至坠毁。基于以上两种算法的问题,提出了卡尔曼滤波器与双闭环PID控制算法相结合的方法,卡尔曼滤波器[4]很好地抑制了噪声干扰,结合内环控制飞行速度,外环控制飞行姿态的双闭环控制[5]方法,控制过渡时间短,没有出现超调和波动现象,有效地防止了无人机的抖动,抗干扰能力增强,具有很好的自适应能力。
2 系统硬件设计
无人机巡检系统由无人机、遥控器、通信设备、机载设备和地面站五部分组成。对于无人机而言,其电路构架要简单,且需具备体积小、质量轻、低功耗、抗干扰能力强、重心平衡、模块化设计以及可升级、扩展方便等特点。在进行设计的时候,需要综合考虑这些特性,以满足总体的优化设计。硬件系统设计如图1所示。
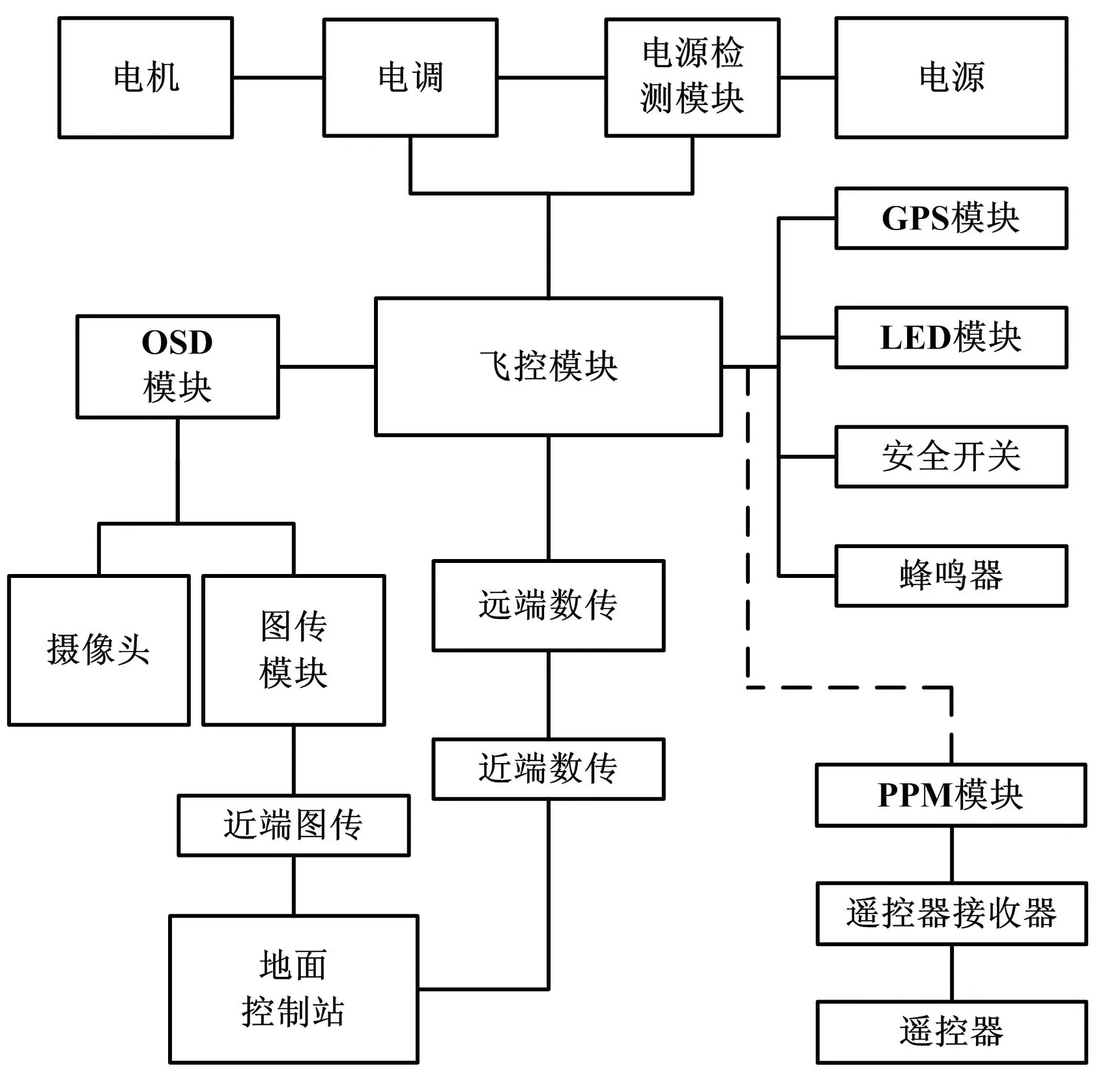
图1 硬件系统框图
Fig.1 Block diagram of hardware system
3 系统软件设计
3.1 内核系统移植
NuttX是一个实时操作系统,强调标准兼容和小型封装,主要遵循Posix和ANSI标准,对于这些标准下不支持的功能,采用来自unix和常见RTOS(如VxWorks)的额外标准API。NuttX可以构建为开放的、平面的嵌入式RTOS,或者单独构建为具有系统调用接口的微内核。NuxttX编译环境可以选择windows平台,也可以选择linux平台。这里选择的是linux平台,操作系统采用Ubuntu12.04。
安装交叉编译器,下载gcc-arm-none-eabi-4_8-2014q3-20140805-linux.tar.bz2,解压到/opt/px4目录下;设置环境变量,在/etc/profile文件的后面加入export PATH=$PATH:/opt/px4/gcc-arm-none-eabi-4_8-2014q3/bin,重启后即可永久生效。
然后下载NuttX内核源码,NuttX的配置系统由Kconfig、Makefile和配置工具组成。内核的Makefile分为最顶层的Makefile、内核的当前配置文档.config、体系结构相关的Makefile、一些Makefile的通用规则和kbuild Makefile。NuttX的主Kconfig文件是nuttx/Kconfig,然后调用各目录下的Kconfig。 nuttx/.config是预设的.config文件,从nuttx/config/<板卡>/<目标配置>/defconfig复制而来。 nuttx/Make.defs从nuttx/config/<板卡>/<目标配置>/Make.defs复制而来。在nuttx目录下执行make menuconfig命令,读取预设的.config文件,调出基于文本菜单的配置界面。根据自己的需求进行定制,这里选择的构建环境是linux、处理器为STM32,同时,选择支持的外设(如I2C,UART等),并配置设备驱动和应用程序选项(如NuttShell的支持)等。退出时,选择YES保存,即生成新的.config文件。执行make后,可生成NuttX内核文件和NuttX的应用程序。
3.2 地面站软件开发
在开发地面站软件时,选择的是Qt4.8.5。这是一个跨平台的C++图形用户界面的应用程序框架。Qt的良好封装机制使得Qt的模块化程度非常高,可重用性好,有丰富的API。地面站软件与无人机通信采用的是无线串口通信方式。
选择串口,设置波特率,按打开串口进行连接,就可以使飞控和计算机进行连接,通过地面站软件可以对无人机进行参数预设,如PID参数、飞行高度等,设置巡检路线,显示无人机通过摄像头采集的图像信息。
4 无人机巡检
4.1 飞行姿态与速度控制
在无人机的控制过程中,通过陀螺仪、加速度计、电子罗盘传感器来获得无人机的位姿[6]和速度,实现双闭环PID控制[7-8],并进行卡尔曼滤波器抑制噪声干扰,使无人机更快、更稳地接近预定的航向。在现代随机最优控制和随机信号处理技术中,信号和噪声通常是多维的非平稳随机过程。因此,在无人机的控制过程中,采用卡尔曼滤波器对信号进行滤波处理。
对于离散域线性系统[9-10],有:
(1)
式中:w(k)为控制过程中的噪声信号;v(k)为测量噪声信号。
离散卡尔曼滤波器递推算法为:
(2)
P(k)=AP(k-1)AT+BQBT
(3)
P(k)=[In-Mn(k)C]P(k)
(4)
x(k)=Ax(k-1)+ Mn(k)x[yv(k)-CAx(k-1)]
(5)
ye(k)=Cx(k)
(6)
采用卡尔曼滤波器的闭环PID控制,如图2所示。

图2 PID 控制系统框图
Fig.2 Block diagram of PID control system
被控对象的二阶传递函数为:
(7)
仿真对照如图3所示。由图3可知,通过采用双闭环PID控制与卡尔曼滤波器结合[11],收敛速度快,提高了无人机的抗干扰能力,使无人机能很快达到稳定状态。
采用四旋翼无人机,在电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转。因此,当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。无人机飞行状态如图4所示。

图3 仿真对照图
Fig.3 Contrast of simulation

图4 飞行状态图
Fig.4 Diagram of flight state
在图4中,电机1和电机3为逆时针旋转,电机2和电机4为顺时针旋转,规定沿X轴正方向为向前运动,箭头沿Z轴向上表示此电机转速提高,向Z轴下方表示该电机转速下降。

(8)
①垂直运动:在图4(a)中,当公式(8)中的所有Δv>0时,得到总的向上的升力足以用来克服机身的重力时,便可以垂直上升;当Δv<0时,则垂直下降,直到平衡落地,实现了沿Z轴的垂直运动。当外界扰动量为零时,产生升力与飞行器的重力平衡时,可以保持悬停状态。
②俯仰运动:在图4(b)中,当式(8)中的Δv1>0、Δv3<0、|Δv1|=|Δv3|、Δv2=Δv4=0时,产生的不平衡力矩使机身绕Y轴旋转;同理,当Δv1<0、Δv3>0、|Δv1|=|Δv3|、Δv2=Δv4=0时,机身便绕Y轴向另一个方向旋转,实现飞行器的俯仰运动。
③滚转运动:在图4(c)中,当公式(8)中的Δv2>0、Δv4<0、|Δv2|=|Δv4|、Δv1=Δv3=0时,可使机身绕X轴方向旋转;同理,当Δv2<0、Δv4>0、|Δv2|=|Δv4|、 Δv1=Δv3=0时,便绕X轴向另一个方向旋转,实现飞行器的滚转运动。
④偏航运动:在图4(d)中,当公式(8)中的Δv1>0、Δv3>0、Δv2<0、Δv4<0时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕Z轴转动,实现飞行器的偏航运动。
4.2 巡检方式
无人机巡检一般采用在巡检线路位置的斜上方,沿着预定巡检方向飞行,具体飞行路径大致如图5所示。

图5 飞行方式图
Fig.5 Diagram of flight mode
通过地面基站软件设置巡检路线,可以设置飞机定高,依次飞过各巡检点,并返航起飞点。依靠无人机的罗盘和GPS功能,配合离线地图来完成巡检路线的设定。巡检工作人员通过地面基站软件,观测无人机摄像头采集的输电线路的实时图像来完成线路的巡检。当出现意外情况,如电池能量不够时,可以通过地面基站软件控制无人机的飞行,并随时改变巡检路线。
5 结束语
以无人机代替人工来完成输电线路巡检,不仅减
少了劳动力,降低了巡检成本,还使巡检过程更加优化。无人机采用实时、可靠的嵌入式操作系统,配合地面站软件,使巡检人员可以实时控制无人机,制定有效的巡检方式。通过机载摄像头,在地面站软件上显示出输电线路的影像,可及时发现输电线路存在的隐患及问题。通过采用GPS/INS组合导航方式,避免了无人机偏离轨迹的情况。通过采用基于卡尔曼滤波器的双闭环PID控制方式,使无人机更快、更稳定地进入预定的飞行模式,提升了抗干扰能力,保证了系统的稳定性,有效地提高了系统的精度和自适应能力。
[1] 林韩,林朝辉,汤明文,等.电力输电线路无人直升机巡视的应用[J].华东电力,2011(10):1657-1660.
[2] 汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中的应用[J].中国电力,2013(3):35-38.
[3] 李一波,李振,张晓东.无人机飞行控制方法研究现状与发展[J].飞行力学,2011(2):1-5,9.
[4] 邹凌,孙玉强,孙琦.基于卡尔曼滤波器的PID控制仿真研究[J].微计算机信息,2007,23(6S):79-81,157.
[5] 黄黎芬,姜建国.一种新型基于双闭环PID控制的SVC控制系统研究[J].系统仿真学报,2007(8):1803-1806,1868.
[6] XIONG J J,ZHENG E H.Position and attitude tracking control for a quadrotor UAV[J].ISA Transactions,2014,53(3):725-731.
[7] SUNDARAVADIVUA K,SIVAKUMARA S,HARIPRASAD N.2DOF PID controller design for a class of FOPTD models-an analysis with heuristic algorithms[J].Procedia Computer Science,2015(48):90-95.
[8] MOUAYAD A SAHIB.A novel optimal PID plus second order derivative controller for AVR system[J].Engineering Science and Technology,2015,13(21):194-206.
[9] DREANO D,MALLICK B,HOTEIT I.Filtering remotely sensed chlorophyll concentrations in the Red Sea using a space-time covariance model and a Kalman filter[J].Spatial Statistics,2015(13):1-20.
[10]ZHEN Y C,HARLIM J.Adaptive error covariances estimation methods for ensemble Kalman filters[J].Journal of Computational Physics,2015,294(c):619-638.
[11]ZIHAJEHZADEH S,LOH D,LEE T J,et al.A cascaded Kalman filter-based GPS/MEMS-IMU integration for sports applications[J].Measurement,2015(73):200-210.
Application of GPS/INS Integrated Navigation in Inspection of Transmission Line
The inspection of transmission lines using manpower is time-consuming and increasing labor costs; while using unmanned aerial vehicle (UAV) as the carrier may reduce time consumption and manpower costs. With help of ground station software and GPS/INS, the inspection route is preset; and real time monitoring can be carried out during inspection process. The method based on combination of Kalman filter and dual closed loop PID control is proposed. Kalman filter is used to suppress noise interference; the inner closed loop of the dual closed loop control is used to regulate the speed, and the outer loop is used to control attitude of UAV; thus the flight out of control caused by shaking of UAV might be avoided, for achieving the inspection perfectly.
GPS/INS Embedded technology Power system UAV Real time monitoring Kalman filter PID Inspection
吉林省教育厅“十二五”科学技术研究基金资助项目(编号:2014324);
吉林省科技发展计划基金资助项目(编号:No20150203002SF);
长春市科技计划基金资助项目(编号:14KG026)。
孟祥萍(1961—),女,2001年毕业于东北大学电气工程及其自动化专业,获博士学位,教授;主要从事智能控制理论及应用、电力系统安全性优化应用等研究。
TH6;TP3
A
10.16086/j.cnki.issn 1000-0380.201612014
修改稿收到日期: 2016-05-06。
猜你喜欢
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
黑龙江电力(2017年1期)2017-05-17 04:25:05
能源(2016年2期)2016-12-01 05:10:31
环境科技(2016年5期)2016-11-10 02:42:12
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
系统工程学报(2015年2期)2015-02-28 19:53:43