
四轮驱动装置在牧神4YZB系列玉米联合收获机上的应用
2016-12-29 09:21杜志高吕兴明
新疆农机化 2016年4期
杜志高,吕兴明
(新疆机械研究院股份有限公司,新疆 乌鲁木齐 830026)
四轮驱动装置在牧神4YZB系列玉米联合收获机上的应用
杜志高,吕兴明
(新疆机械研究院股份有限公司,新疆 乌鲁木齐 830026)
传统的自走式玉米联合收获机都是前轮驱动,后轮导向。该驱动方式在路况不好的道路上行驶或在泥泞的田地里作业时,容易造成轮胎打滑、并深陷的状况。本文所述的四轮驱动装置是在前轮驱动的基础上,在车辆原来的变速箱输出轴上,通过连接后驱分动箱总成,传动轴以及后转向驱动桥总成,实现四轮驱动,保证联合收获机的正常行驶或作业,解决了前轮驱动的弊端。
玉米联合收获机;自走式;四轮驱动;研制
目前国内玉米联合收获机的研究与生产技术已经成熟,玉米的收获已基本实现了全部机械化作业。国内市场上出现的玉米联合收获机大都采用前轮驱动,后轮导向的形式。每年的收获季节,个别地区雨水偏多,致使联合收获机作业区域的地面湿滑、泥泞,严重影响机器的通过性能。在路况不好的道路上行驶或在泥泞的田地里作业时,使用这种形式驱动的联合收获机的通过性受到了很大限制,也降低了联合收获机的作业效率。有的联合收获机把前驱动轮改为半链轨式,用于防陷,提高联合收获机的通过能力,但是这种结构对变速箱驱动半轴阻力较大,容易引起变速箱及其附属零部件的损坏,还不利于行走转向和转移地块[1,2,4]。
为解决上述问题,新疆机械研究院在原有的牧神4YZB系列玉米联合收获机上安装了四轮驱动装置,显著地提高了在湿滑田地上的通过性能,并且操作方便,大大提高了联合收获机的作业效率,解决了只有前轮驱动的弊端[3]。
1 结构及工作原理
1.1结构
如图1、2、3、4所示,该装置包括四驱离合手柄、行走变速箱、后驱分动箱总成、后驱前传动轴、中间轴总成、后驱后传动轴、后转向驱动桥总成、前驱动轮总成等。四驱离合手柄1安装在联合收获机驾驶室内的操纵箱上,便于在驾驶室内进行前驱与四驱的转换。前驱动轮总成8上装有行走变速箱2,发动机提供的动力通过行走变速箱,作用于前驱动轮上,实现车辆的行走。后驱分动箱总成3与行走变速箱2的制动器端的输出轴相连接,便于将动力向后传输。后驱前传动轴4、中间轴总成5、后驱后传动轴6依次将动力传入后转向驱动桥总成7,实现后轮的驱动,及四驱实现。后驱分动箱总成3上装有离合拨叉,通过四驱离合手柄1上的软轴控制其处于结合位置或分离位置,实现四驱的离合。
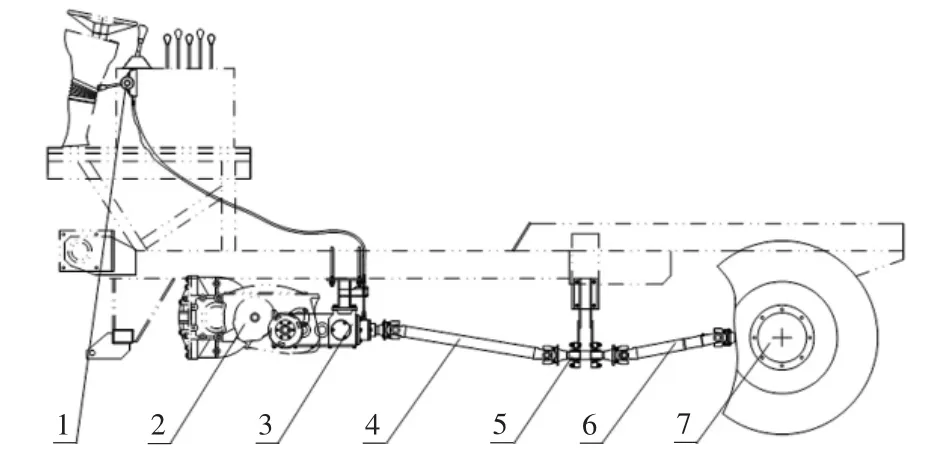
图1 四轮驱动装置主视图

图2 四轮驱动装置俯视图
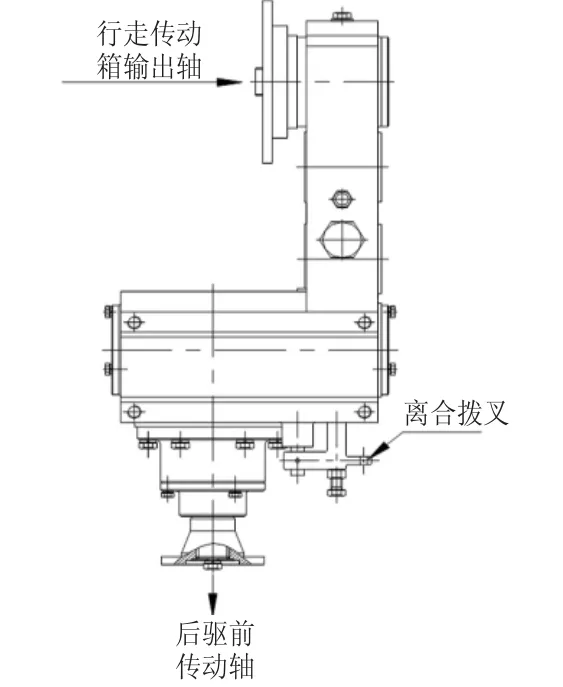
图3 后驱分动箱总成俯视图
1.2工作原理
自走式玉米联合收获机自带的发动机将动力传递到位于前驱动轮上的行走变速箱上,动力经行走变速箱分配,分别传递给左右前驱动轮,实现车辆的行走,即实现前驱[3]。
行走变速箱右侧制动器端的输出轴与后驱分动箱总成相连接,将动力传递到该总成上,经过该总成内部轴系和齿轮系的变速和转向后,动力被传递到后驱前传动轴上,经过中间轴总成和后驱后传动轴后,动力被传递到后转向驱动桥总成上,之后被分配到左右后转向驱动轮,实现后驱[1,2]。
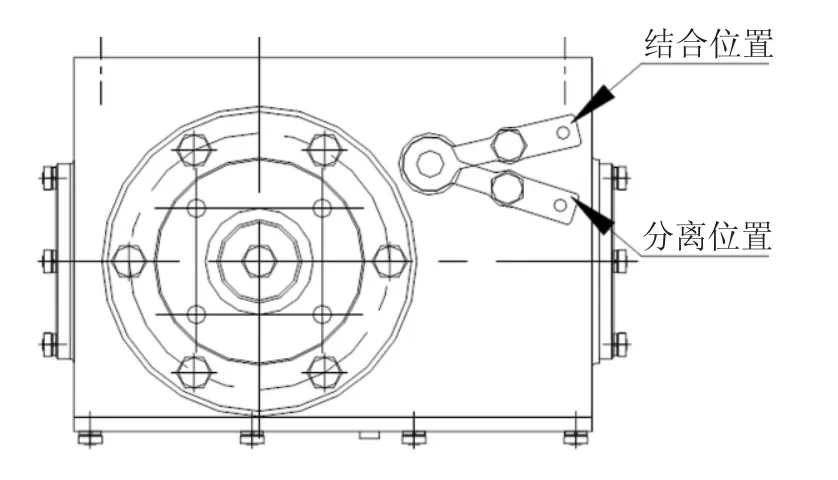
图4 后驱分动箱总成离合位置视图
安装在联合收获机驾驶室内操纵箱上的四驱离合手柄,通过软轴控制后驱分动箱总成上的离合拨叉,使其处于结合位置或分离位置,即在驾驶室内进行前驱与四驱的转换,快速便捷实现四驱的离合。
分动箱总成上的离合拨叉处于结合位置时,动力传递到后转向驱动桥总成上;当离合拨叉处于分离位置时,动力只被传输到分动箱总成内部,不输出到后驱前传动轴上。
2 技术创新
(1)后驱分动箱总成的设计,能够与行走变速箱完美结合,实现动力的传输和转向。
(2)四驱离合手柄安装在驾驶室内,能够快速便捷的实现前驱与四驱的变换。
(3)前后传动轴与中间轴总成的动力传输角度设计,保证了动力的传递平顺,效率高。
(4)后转向驱动桥总成的设计,既能保证动力的强劲输出,又能同时实现转向。
3 工作性能特点
(1)后驱分动箱总成与后转向驱动桥总成采用模块化设计,方便快捷的安装在玉米联合收获机上,提高了玉米联合收获机的通用性。
(2)安装四轮驱动装置后更加适应我国玉米收获不同地块区域,不同收获时间段的作业。
(3)设计新颖,结构简单、维修便捷、性能完善、作业效率高、作业质量好。
(4)整套装置简单可靠,故障率低,适应性好。
4 试验情况
装有该四轮驱动装置的牧神4YZB系列玉米联合收获机已进行了批量生产,并在新疆北疆地区、内蒙古地区和东北大部分地区进行了大面积的推广销售,取得了不错的使用效果,显著地提高了在湿滑田地上的通过性能,并且操作方便,大大提高了联合收获机的作业效率。
5 结论
该四轮驱动装置通过在牧神4YZB系列玉米联合收获机上的应用与实践,表明该装置的性能达到了设计和作业要求,能够极大提高作业效率,延长了作业时间,增强了作业适应性,增加了机主的收益。
[1]徐海港,王建强,张岳生.联合收割机四轮驱动装置的研制与应用[J].农业工程,2012(02):12~14.
[2]徐秀生.玉米收获机加装四轮驱动装置的特点[J].农业与技术,2014(05):59~59.
[3]李宝筏.农业机械学[M].北京:中国农业出版社,2003
[4]陈志,郝付平,王锋德,等.中国玉米收获技术与装备发展研究[J].农业机械学报,2012,43(12):44~50.
Application of four wheel drive device in the corncombine harvester of 4YZB series of Moshine
DU Zhi-gao,LV X ing-m ing
(Xinjiang Machinery Research Institute Co,Ltd.,Urumqi830026,Xinjiang,China.)
The traditional self- propelled corn combine harvester is a front- wheel drive, the rear wheel is only responsible forguiding. When this drive method is used in muddy fields or barely passable road, it is likely to cause tire slip and deep condition.In this paper, the four- wheel drive system is based on front- wheel drive. Through the original vehicle gearbox outputshaft is connected with the drive transfer case assemblies, drive shaft and rear steering drive axle assembly, the four- wheel driveis achieved. Not only does the four- wheel drive ensure the normal running or operation of the combine harvester, but also itsolves drawbacks of the front- wheel drive.
Corn Combine Harvester;Self-propelled;four-wheeldrive;Developing
10.13620/j.cnki.issn1007-7782.2016.04.001
S225.5+1
A
1007-7782(2016)04-0005-03
2016-07-27
猜你喜欢
山东冶金(2022年1期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国新技术新产品(2020年4期)2020-05-05
制造技术与机床(2019年8期)2019-09-03
科技创新导报(2016年27期)2017-03-14
凿岩机械气动工具(2015年1期)2015-11-11
中国火炬(2015年1期)2015-07-25
车迷(2015年6期)2015-03-20
汽车电器(2014年5期)2014-02-28
