车载移动测量系统点云误差分析及修正
2016-12-28 11:03唐德利李兆雄
地理空间信息 2016年8期
唐德利,李兆雄
(1.国家测绘地理信息局重庆测绘院,重庆 400015)
车载移动测量系统点云误差分析及修正
唐德利1,李兆雄1
(1.国家测绘地理信息局重庆测绘院,重庆 400015)

为使车载移动测量系统输出更高精度的基础数据——点云,对车载移动测量系统的定位误差来源进行分析,探索减小作业误差以及利用控制点进行点云修正的方法,通过实例验证控制点布设数量与点云精度提高的密切关系,证明布设位置合理、数量足够的控制点,能大幅提高点云精度。
车载移动测量;点云;误差;控制点
车载移动测量系统是在GPS、GIS、航测遥感、光学、机械、电子、计算机等技术基础上发展起来的,是在机动车上安装GPS、CCD、INS、激光扫描系统、里程计等先进传感器和设备,在车辆快速行进中,采集行进路线地面目标的空间及属性数据的空间地理信息高速采集系统[1]。车载移动测量系统主要应用于城市建模、测图、部件测量、公路建模、资产现状调查、竣工测量、导航数据生产、地下车库测量建模、地铁隧道测量建模、地理市情调查与监测等。 由于车载移动测量系统的作业环境千变万化,对数据精度有很大影响,甚至可能产生不可预见的误差。因此,要保证数据精度,除规范作业外还必须对其基本数据——点云进行修正,以确保其数学精度符合要求。
1 车载移动测量系统误差来源
1.1 POS定姿定位误差
PoS系统是车载移动测量系统的核心,其产生的定姿定位误差也是整个系统定位误差的主要来源之一。其定姿定位误差主要包括3个部分:GNSS动态(包括静态)定位误差;IMU惯性测量平台姿态测量误差;DMI里程计里程测量误差[2]。
GNSS定位误差来源与通常GNSS测量误差来源相同,主要包括接收机钟差、多路径效应、卫星钟差、星历误差、整周模糊度求解误差、电离层时延误差、观测噪声引起的误差。为减小这些因素对GNSS定位精度的影响,可以建立多个测区内的基准站,以保证其动态定位差分计算结果精度符合要求。
IMU惯性测量平台姿态测量误差主要包括元件误差、安装误差、原理误差、外干扰误差。元件误差是加速度计与陀螺仪不完善引起的误差,主要指陀螺的漂移和加速度计的零位偏差及元件刻度因数误差;安装误差是加速度计和陀螺仪安装在平台上时不准确造成的误差;初始条件误差是指初始对准及输入计算机的初始位置、初始速度不准所形成的误差;外干扰误差主要是指车辆行驶时由振动引起的加速度干扰。DMI里程测量误差,主要指DMI尺度因子不准所导致的误差。
1.2 激光扫描测距测角误差
激光测距误差产生的主要因素有仪器误差和环境误差。仪器误差主要是指电子光学电路对经过目标点反射及空间传播后的不规则激光回波信号进行处理确定时间延迟带来的距离测量误差,还包括棱镜旋转误差、振动误差、电路响应时间延迟误差。环境误差主要指由于反射面和反射线路的地理环境特征不同,在信号漫反射时产生信噪及信号传递中的大气折射、温度变化,使信号传递路径产生弯曲而带来的测距测角误差[3]。
1.3 系统集成误差
系统集成误差主要包括传感器安置误差、时间同步误差、坐标系统转换误差等。
2 车载移动测量系统点云误差
车载移动测量系统最基本的输出数据就是点云数据,也是后续作业的数据基础,同时车载移动测量系统各个方面的误差也会全面集中体现在点云数据中。由于众多误差源对点云数据的影响,所获取的点云数据看起来并不完美。在室外扫描的过程中,不可避免地存在部分地面目标的多次扫描,这部分点云会产生上下分层和重影,如图1。这种情况会严重影响地面目标的空间几何特征提取,自动提取的构件或要素会出现较多错误和重复。另一方面,在扫描区域内如果存在局部的精密大比例尺地图数据(包括城市地籍图、城市规划用地形图等),通过数据叠加,发现点云与精密地图数据间存在不小的空间偏移,这就是车载移动测量系统点云误差带来的结果。
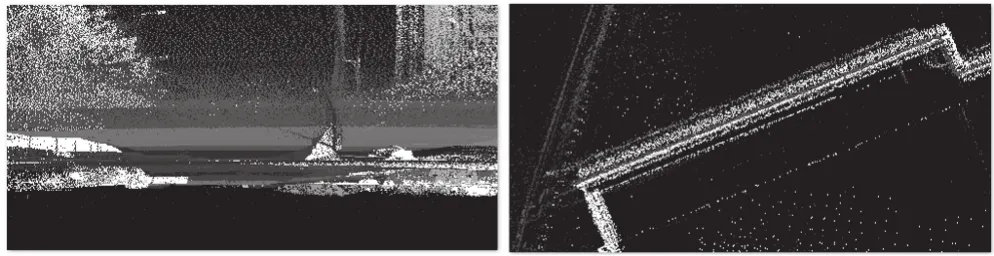
图1 点云分层和重影
3 点云误差的削弱
车载移动测量系统点云数据误差虽然不可避免,但可以尽可能削弱和修正。首先,要进行系统检校,以尽可能减小系统误差对点云的影响,主要包括:① 室内标定,获取传感器与PoS之间的空间位置关系参数,纳入后续数据处理;②运动检校,在室外场地作业模式下进行系统检校,获取DMI等其他参数[4]。通过数据处理精确测定所需参数,可以大幅削弱系统的点云误差。其次,在室外扫描作业时,严格规划路线和时间、规范操作,尽量避免天气、交通状况及不规范操作对数据精度的不利影响。
4 点云误差的检验与修正
4.1 增测控制点方法
1)控制点的点位选取与密度。这里所说的控制点与通常的测量控制点有所不同,差别在于点的选取位置和使用目的不同。通常的测量控制点一般要求选择在开阔、地质结构稳定、利于保存的地方,布设目的是作为测站进行大比例尺地形图测量,而此处的控制点要求布设在地面目标的几何特征点上,目的是用于点云精度的检验与修正。点云修正分平面位置修正和高程修正,平面修正控制点要求布设在目标的投影平面几何特征点位置,高程修正控制点要布设在周边比较平坦的目标几何特征点上。这样选点是为了避免在点云精度检验和修正过程中点云选取的准确性影响修正结果。控制点的选取位置和密度,还要根据重复点云的偏离程度及其分布情况来确定,在偏离较大、变化较多的地方要加大密度,在扫描区域的起始位置、结束位置须设置控制点,中间部分则根据项目精度要求适当地均匀布设。
2)控制点的观测。控制点观测方法应根据作业区域所在地的情况来选择。在居民地密集、GPS卫星信号较差或极易受到干扰的地方,以选用全站仪测距导线方法施测为宜;在视野开阔、利于GPS观测的区域,建议采用单基站RTK或网络RTK方法施测。其精度应不低于最低等级地形测量测站控制点的要求。
4.2 参照已有地形图方法
如果在作业区域内已有能满足精度要求的精密地形图,则可以在已有的地形图上选取平面修正控制点和高程修正控制点来检验和修正点云误差。选取方法相同,但要注意优先选取开阔、突出,与原有控制点距离较小的要素特征点,避免原有地形图误差对点云精度检验和修正的可靠性造成不良影响。
4.3 建立修正用数据文件
修正用数据就是点云修正所需的文件数据,它包括控制点数据文件、控制点对应的点云数据文件。以SSW系统为例说明建立方法。
1)首先在文本编辑器中编辑控制点文件。控制点文件为纯文本文件,格式下:
其中,id为流水号;x、y、z为坐标(东、北、高);name为控制点名;time为时间列,此处赋0。
2) 将控制点文件转为注记文件。在SWDY软件中,选择“3d或2d+dem文件→层”菜单。动作完成后,在原控制点文件所在文件夹中会生成一个.lab文件。按注记读入此文件,控制点就映射到点云中了。
3)提取控制点对应的点云坐标。首先,建立点云采点坐标文件,检查点云信息选项是否正确。然后以注记方式采集点云点,并修改点名与控制点名一致。采点时,点云文件逐个显示,同一控制点有多个点云时,每个点云都需要采点,同时保证id值的唯一性。依次采集其他控制点的点云坐标。最后,保存输出。
4.4 数据修正
1)修改采点文件。采点文件格式为标准格式。点云修正前,在最后一列增加每个点的运算属性,1代表此点只参与高程修正;2代表此点只参与平面坐标修正;3代表此点参与平面坐标和高程修正。修改后的采点纯文本文件格式如下:
各项内容与控制点文件相同。
2)数据修正。数据修正有2种方式,点云数据修正和轨迹修正,如果只考虑数据精度,可采用点云数据修正,如果考虑修正后建立快速模型,可采用轨迹修正,然后用修正后的轨迹重新计算点云数据和影像姿态数据。①点云数据修正。点云数据修正完成后,在原点云文件夹中会生成一个新的DX文件夹,修正后数据存放在此文件夹中;②轨迹修正。当选择轨迹修正时,需要选择坐标系,待修正数据文件夹要选择组合导航数据所在文件夹。如果选择地方坐标系,还需要选择转换参数类型。计算完成后,会新生成一个文件名带有DX字样的组合导航数据文件。重新计算点云数据时,请选择轨迹已修正选项。影像姿态文件需要重新计算。
5 点云误差修正与检验实例
5.1 作业区域概况
作业区域在重庆大学城的麒雅中央花园B区,交通状况良好,区域内地形较平坦,大型植被遮挡少,花园小区内为矮小花木,对小区的建筑没有形成封闭性遮挡,有利于车载移动测量系统扫描作业。但区域内有高压电力线穿过,对GNSS卫星定位精度有一定影响。
5.2 数据采集情况
扫描作业历时170 min,包括线路踏勘设计、GNSS基准站架设、作业初始化、扫描作业、作业结束化、扫描数据下载与传输等作业过程。扫描面积约36 000 m2,数据处理生成点云文件19个,点云数量约3 800万个。
5.3 点云误差修正与检验
点云修正及误差检验以该区域原有1∶500数字地形图为基础,获取控制点并作为检验依据,按不同控制点(固定地物点)数量、分布,多次修正并检验,精度统计参照地面目标明显的几何特征点位置比对进行,精度统计表如表1,误差分布如图2~5。
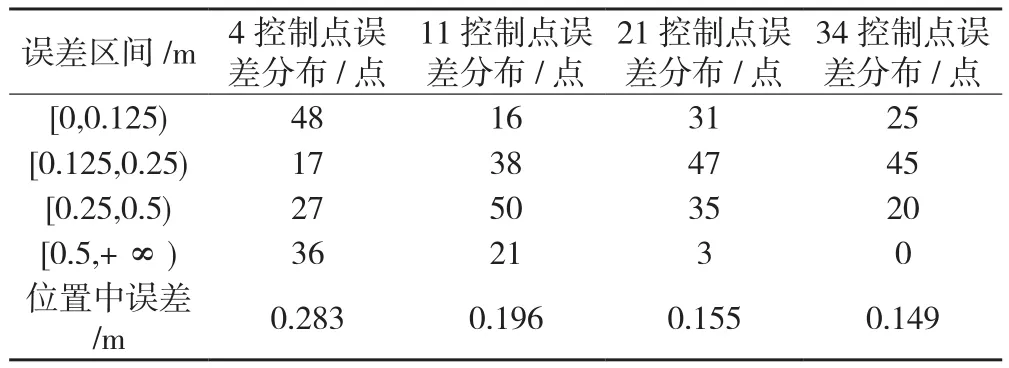
表1 不同数量控制点的点云精度统计表
由上述统计可以看出,当增加控制点数量时,点云误差逐渐减小。综上所述,通过车载移动测量系统误差的基本来源分析,并优化作业方法、利用控制点修正点云数据,使系统输出的基本数据——点云的精度得到大幅度提高,为后续的数据应用提供更为可靠的精度保证。
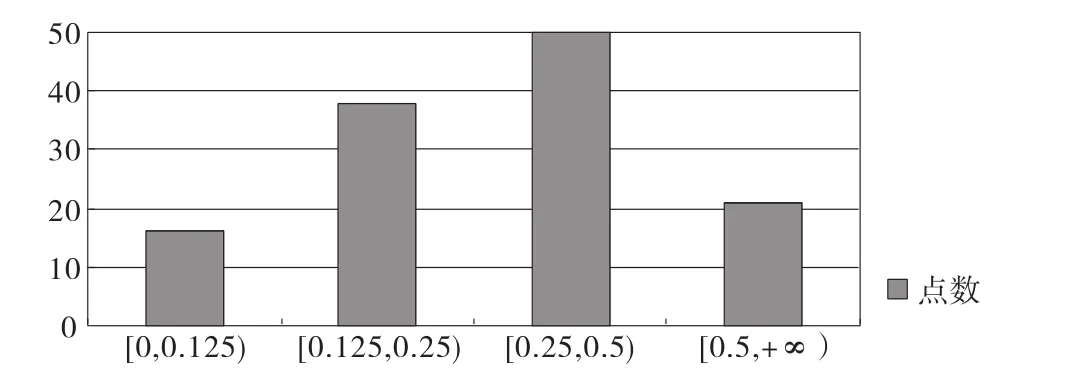
图2 固定4个点的误差分布
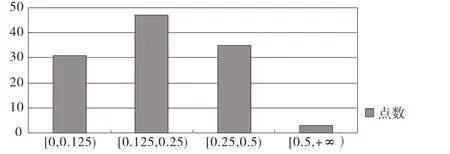
图3 固定11个点的误差分布
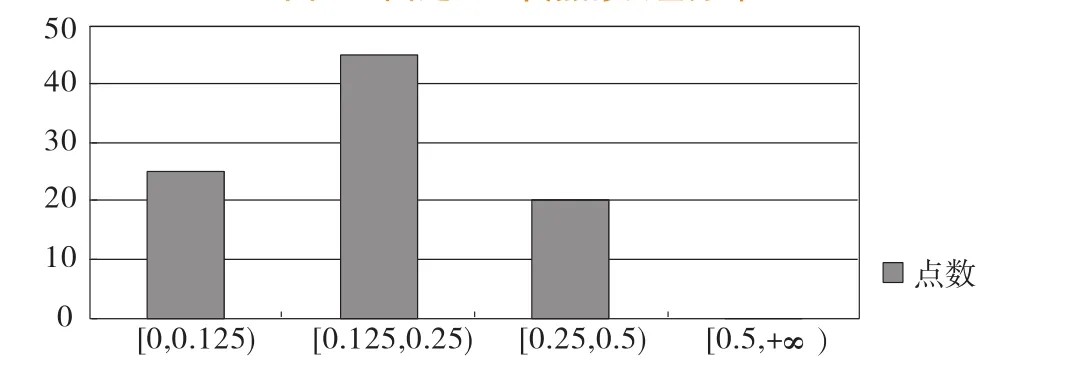
图4 固定21个点的误差分布
[1] 易延光,黄洪彬.车载移动测量系统的构成与应用[J].黑龙江水利科技,2011,39(3):284-285
[2] 李鑫.车载移动测量系统误差分析与检校方法研究[D].郑州:信息工程大学,2012
[3] 马耀昌,辛国.GPS测量误差与数据处理的质量控制[J].地理空间信息,2006,4(2):22-24
[4] 郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32-34
[5] 刘先林.SSW车载移动测量系统及其应用[DB/oL]. (2012-11-08)[2015-06-21].http://wenku.baidu.com/ view/2c3fb8c8a1c7aa00b52acb4d.html.
[6] 朱士才.LiDAR的技术原理以及在测绘中的应用[J].现代测绘,2006(4):15-17
[7] 周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北京:测绘出版社,1999
[8] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007
P235
B
1672-4623(2016)08-0033-03
10.3969/j.issn.1672-4623.2016.08.011
唐德利,工程师,主要从事测绘地理信息产品检验工作。
2015-08-18。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18
中国公共安全(2017年11期)2017-02-06
中国工程咨询(2017年12期)2017-01-31
制导与引信(2016年3期)2016-03-20