
面向对象的高分辨率影像土地利用信息提取
2016-12-28 02:20:44金文韬许捍卫李正源王海君
地理空间信息 2016年9期
金文韬,许捍卫,李正源,王海君
(1.河海大学 地球科学与工程学院,江苏 南京 210098)
面向对象的高分辨率影像土地利用信息提取
金文韬1,许捍卫1,李正源1,王海君1
(1.河海大学 地球科学与工程学院,江苏 南京 210098)

运用面向对象的分类方法对实验区高分辨率影像进行最优分割尺度的影像分割。首先利用ESP算法确定影像的最佳分割尺度,再运用CART决策树分类对土地利用信息进行提取,并对分类结果进行后处理,进一步提高分类精度。最终分类结果精度达到80.38%。
土地利用;最优分割;面向对象的分类;高分辨率影像
进入21世纪,随着我国经济的飞速发展以及人口的激增,土地利用变化更加复杂和多样化,运用遥感技术更新土地利用基础图件已成为国内外土地利用和覆盖变化研究的重点方向。本文基于高分辨率QuickBird影像,采用eCognition软件对实验区影像进行最优分割尺度分割。利用ESP算法确定影像的最佳分割尺度,再利用CART决策树分类对土地利用信息进行提取,取得了较好分类精度。
1 实验区和研究数据
实验区位于长江北岸,南京市浦口区江浦街道,与南京主城区隔江相望,总面积192万km2。本文选取QuickBird卫星影像[1-2]为现势的遥感数据,拍摄时间为2012年,包含2.4 m的多光谱波段和0.6 m的全色波段,含红、绿、蓝和近红外4个波段。经过影像融合、配准和裁剪后,实验区影像如图1所示。

图1 实验区原始影像
2 研究方法
2.1 最佳分割尺度、精致度和形状参数的确定
在面向对象的分类方法中首先要确定影像的最佳分割尺度,本文运用ESP分割来确定最佳分割尺度。其主要思想为[3]:以局部方差(LV)的标准偏差均值来代表某块影像检查窗口中对象的异质性。因为在分割尺度合适的对象中,像素相互聚集在一起,LV将变低,反之LV将变大。最佳尺度的选择是一个迭代过程,当前尺度下的LVn值等于或低于前一尺度下LVn-1时,迭代停止;n-1次分割的尺度即为最佳分割尺度。
本文通过ESP分割确定最佳分割尺度为45,并以此为实验区影像的最佳分割尺度。在确定形状指数(Shape)时,通过固定紧致度参数(Compactness)为0.6,步长为0.2,改变Shape参数选择最优的形状参数,确定Shape参数为0.5最合适;然后固定Shape参数为 0.5,步长为0.2,改变Compactness参数来选择最优的紧致度参数,最终Compactness参数确定为0.5。
2.2 CART决策树分类
决策树[4],即判定树,是通过节点处的判别式将对象进行区分。CART[5]决策树递归分割数据集,以机器学习形式确定最优的计算变量,再得出各节点的判别式,具有较为简单、便于计算[6]的特点。样本载入后,需要为样本选取训练的特征集,以构建决策树形成分类规则[7]。基本训练选取平均值(Mean)、标准差(Standard Deviation)、贡献率(Ratio)和亮度值(Brightness)4个特征参与计算,除此之外自定义了4 类指数加以训练,如表1所示。
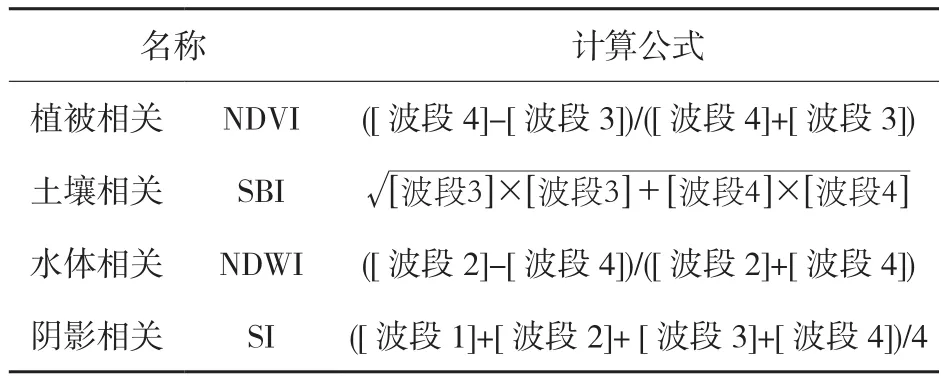
表1 自定义指数表
结合2009年历史土地利用矢量图的分类体系和全国土地利用[8]分类编码,根据实验区现状确定土地利用分类体系为采矿用地、草地、茶园、村庄、公路用地、果园、旱地、建筑用地、坑塘水面、林地、河流、农村道路、水田、沟渠、田坎和沼泽等16类
设置决策树的深度为10,分割节点最小样本数为5,交叉验证修剪的最小样本数为2,通过对选取的2 139 个样本点和相应特征变量的训练,得到79个叶节点,每个叶节点表示单条规则,共79条规则。CART决策树建立并运行后得到分类结果如图2所示。
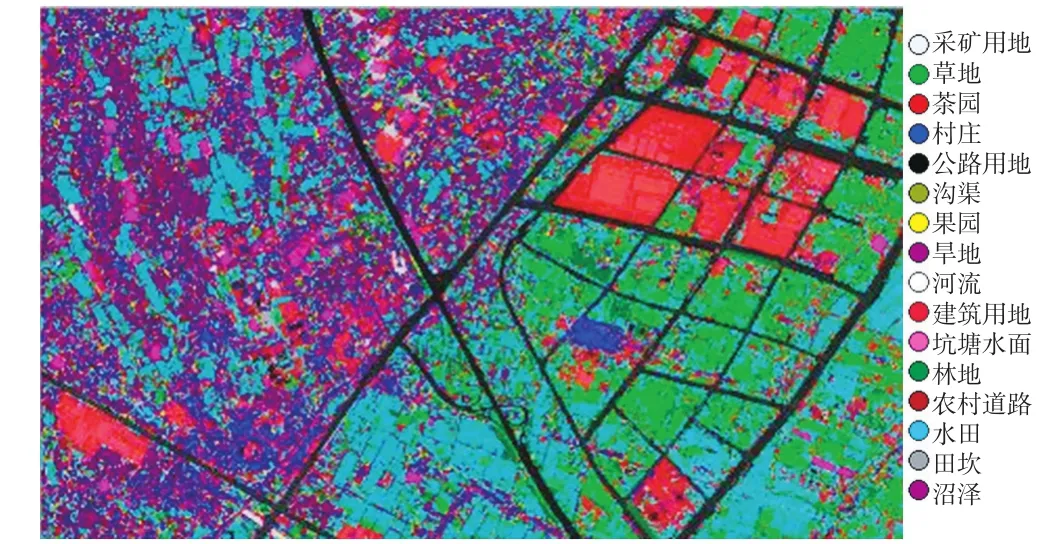
图2 CART决策树分类结果
2.3 分类后处理
CART决策树分类取得了较好的分类结果,但将分类结果放大后就会发现存在坑塘水面与周围地物混淆、阴影遮挡道路、部分主干道有断开现象等问题,为提高精度,需要对上述问题进行处理。
1)坑塘水面的完善。在实验区范围内,部分坑塘邻近采矿用地,或被采矿用地包围,提取时容易被分为采矿用地。由于坑塘水面形状相对规则,采矿用地大多边界不规则,因此可运用形状指数(Shape Index)来区分。形状指数表示影像对象的面积和周长的关系度,其计算公式为:
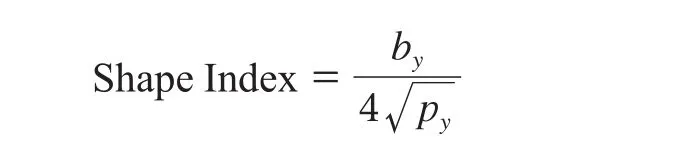
式中,by为影像对象的周长;py为对象的面积;边界越规则,Shape Index值就越小,反之则越大。
2)建筑物地类的完善。由于太阳照射角度和建筑物高度的影响,高层建筑物投射的阴影落在了建筑物影像内部,然而阴影的光谱响应接近于道路的光谱值,所以提取后在建筑物内部会出现块状阴影。由于建筑物遮挡引起的阴影与建筑物本身存在共有边界,可采用类相关特征Rel.border to对建筑物边缘的阴影进行搜索,同时考虑建筑物在亮度上与阴影的差异,最终选择Brightness≥300和Rel.border to建筑物≥0.5这两条规则将阴影归类为建筑用地类。
3)主干道断开的连接。由于主干道两旁的地物较复杂,如周围存在建筑用地、林地和沟渠等类别,主干道提取结果存在错分,导致主干道连接中断。为使道路中断处顺利连接,本文使用区域生长法进行处理。Image Object Fusion算法是一种区域生长算法,此算法的基本原理是[6-7]将需要融合的种子对象通过设置的种子对象周边候选对象的种类和循环次数,到达填补缝隙的效果。实验中使用棋盘分割将道路周围对象分割成细小碎块,然后采用Image Object Fusion规则使道路在背景对象中融合生长。设置对象为道路周边的建筑用地和草地,拟合模式设置为best,候选对象、种子对象以及目标对象权重设置为(2,-1,-1);然后使用Connector算法,将道路连接起来。
3 精度检验
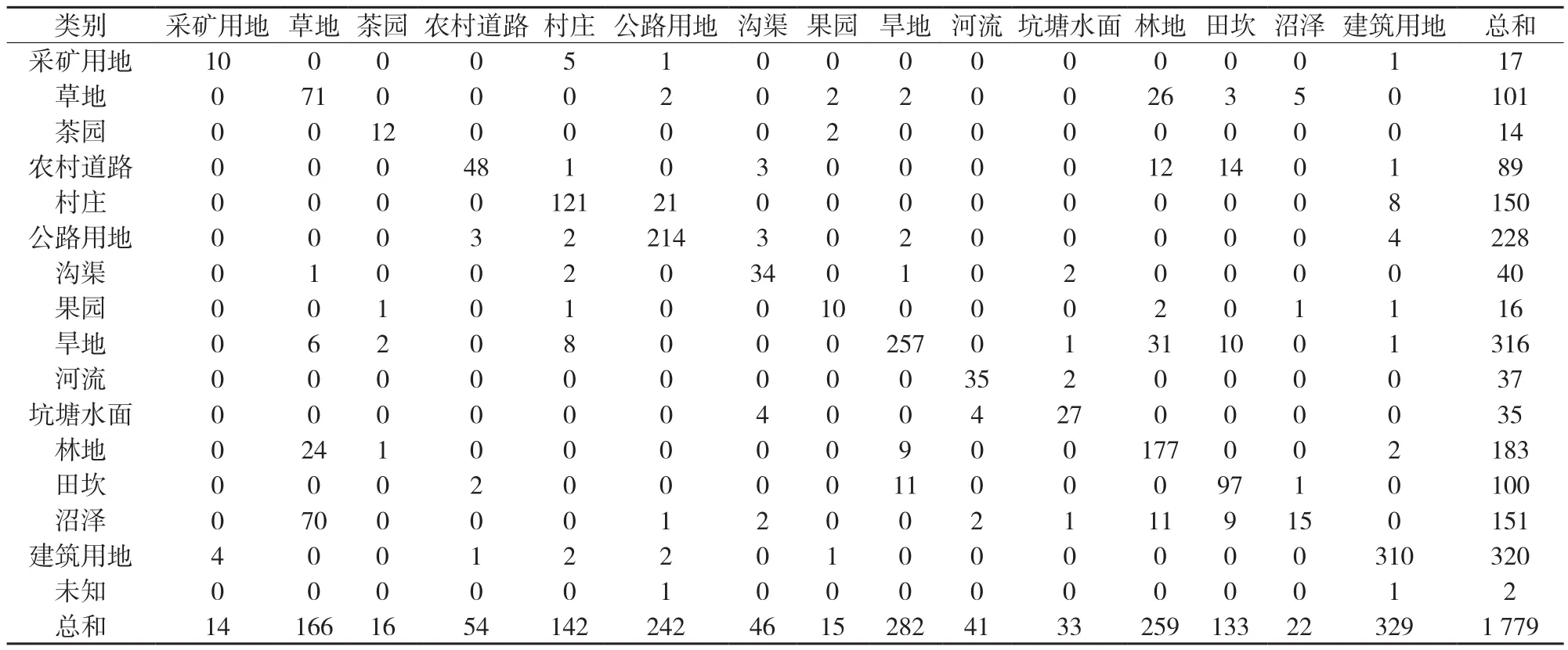
表2 分类精度评价结果
eCognition中提供了2种方式:基于像元的精度评定,即选择一定样本数据导入,以这些样本作为评定的标准导入到相应工程中;基于影像对象的精度评定,即将分割的影像对象选为评定的样本。结合大比例尺的航片进行检验,共选取了1 779个样本,进行精度评价后总体精度达到80.38%,Kappa系数为0.755 2,精度评价结果见表2。
4 结 语
面向对象的影像信息提取,其关键的第一步是影像分割,本文以ESP辅助工具和对比实验得出最优的分割尺度,充分运用高分辨率影像的光谱、形状和纹理等特征构建规则集实现对影像信息的提取;运用了CART决策树分类方法,并对分类结果作相关后处理,进一步提高了影像信息提取的精度,取得良好的分类效果。但在实验过程还存在不足,如面向对象的信息提取过程不够自动化,需要耗费一定时间选取最佳分割尺度;参数不能与后面的分类集成于eCognition中;决策树分类选取的特征变量不够全面;提取地物信息时没有运用分层提取的思想以提高效率等。
[1] 蒋永涛.基于QuickBird影像土地利用信息提取研究[D].雅安∶四川农业大学,2009
[2] 田新光.面向对象高分辨率遥感影像信息提取[D].北京∶中国测绘科学研究院,2007
[3] Drǎguţ L, Tiede D, Levick S R. ESP∶ a Tool to Estimate Scale Parameter for Multi-resolution Image Segmentation of Remotely Sensed Data[J].International Journal of Geographical Information Science, 2010,24(6)∶859-871
[4] 葛春青,张凌寒,杨杰.基于决策树规则的面向对象遥感影像分类[J].遥感信息,2009(2)∶86-91
[5] 赵萍,傅云飞,郑刘根,等.基于分类回归树分析的遥感影像土地利用/覆被分类研究[J].遥感学报,2005,9(6)∶708-716
[6] 齐乐,岳彩荣.基于 CART 决策树方法的遥感影像分类[J].林业调查规划,2011,36(2)∶62-66
[7] 陈昌鸣.面向对象的高分辨率遥感影像农村公路专题信息提取[D].重庆∶重庆交通大学,2011
[8] 徐春迪,屈康庆,郭俊理.宝鸡市金渭两区土地利用信息遥感提取研究[J].地理空间信息,2007,5(6)∶39-41
P237
B
1672-4623(2016)09-0104-03
10.3969/j.issn.1672-4623.2016.09.034
金文韬,硕士研究生,主要研究方向为地理信息系统开发与应用。
2015-08-13。
项目来源:国家自然科学基金资助项目(41101308)。
猜你喜欢
科教新报(2023年47期)2023-12-02 15:58:53
雷达学报(2020年3期)2020-07-13 02:27:16
电子测试(2018年15期)2018-09-26 06:01:34
电测与仪表(2017年24期)2017-12-19 05:15:24
投资北京(2017年1期)2017-02-13 21:09:25
现代计算机(2016年12期)2016-02-28 18:35:25
太空探索(2015年8期)2015-07-18 11:04:44
陕西教育·高教版(2015年4期)2015-06-28 06:09:42
发明与创新·大科技(2015年11期)2015-05-30 07:20:50
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:19
