基于时频特征的高分辨率遥感图像道路提取
2016-12-27 07:01:03胡根生鲍文霞
地理空间信息 2016年6期
张 曦,胡根生,2,梁 栋,2,鲍文霞,2
(1.安徽大学 电子信息工程学院,安徽 合肥 230601;2.安徽大学 计算智能与信号处理教育部重点实验室,安徽 合肥 230039)
基于时频特征的高分辨率遥感图像道路提取
张 曦1,胡根生1,2,梁 栋1,2,鲍文霞1,2
(1.安徽大学 电子信息工程学院,安徽 合肥 230601;2.安徽大学 计算智能与信号处理教育部重点实验室,安徽 合肥 230039)

针对传统的遥感图像道路提取算法存在错漏率较高的问题,提出一种基于时频特征提取和域自适应学习分类器的高分辨率航空遥感图像道路提取新算法。首先利用地统计学抽取道路的时域纹理特征和三维小波变换抽取道路的频域光谱特征,构成高分辨率航空图像中的道路特征。然后使用抽取的道路特征训练由迁移支持向量机模型构建的域自适应分类器,并对高分辨率航空遥感图像进行道路粗提取。最后,结合道路形态特征,用数学形态学方法处理粗分类后的道路,获得提取后的完整道路。仿真实验表明,所提方法能有效降低高分辨率航空遥感图像道路提取中非道路目标的干扰,提高道路提取的精确性。
高分辨率遥感影像;道路提取;地统计学;三维小波变换;迁移学习
高分辨率遥感影像具有高时相性、获取方便快捷、高空间分辨率、信息容量大等特点。利用高分辨率遥感影像进行道路的识别和提取,已成为图像处理、计算机视觉和图像理解等的重点研究课题之一,其研究成果不仅有益于丰富基础地理信息,同时在军事国防、城市规划、环境监测和农业调查等领域也有着广泛应用。
目前多数文献给出的遥感图像道路提取大致可以分为3个步骤,即道路的特征提取、图像的分割和道路的修补。Hu等针对LiDAR数据采用自适应Meanshift检测道路中心点,再使用张量投票法增强道路的显著线性特征,然后利用加权霍夫变换提取道路中心线[1]。该方法只针对特定的LiDAR数据,不适合一般的航空高分辨率遥感图像。区域分割法是较为经典的航空遥感图像道路提取方法,Lefèvre等利用矩形区域提取道路分块,然后采用形态滤波器连接这些道路分块获取完整道路[2];Ma等用区域分割法将道路分割后,采用形态特征与数学形态学方法完成复杂道路的提取[3-4];若道路周边有相邻的房屋、停车场等地物目标,该方法难以区分道路与非道路目标,且道路中心线有毛刺。利用回归预测、分类等方法也可以获得较好的道路提取结果,Song等利用基于目标的滤波器获取道路的光谱和形状特征,再运用SVM分类器、GANMM等将图像粗分为道路组和非道路组,根据形状相似准则采用区域增长法修补道路组中被遮掩的道路[5-6],Miao等采用张量投票法提取道路中心线[7],该类方法对于复杂道路口处的图像提取不够清晰,会出现漏提现象。近年来很多智能学习算法,比如蚁群算法或者人工神经网络算法等已被用来抽取道路信息[8-9],但蚁群算法存在收敛速度慢,神经网络算法存在过拟合等问题。
针对传统道路提取算法中存在的问题,本文考虑道路像元之间存在空间变化性和相关性以及光谱信息中的“异物同谱”或“同物异谱”等现象,利用地统计学抽取道路的时域纹理特征和三维小波变换抽取道路的频域光谱特征构成高分辨率航空图像中的道路特征。由于传统的分类算法对于样本来自不同分布的有限标签模式的分类和回归预测并不鲁棒,本文利用迁移支持向量机模型构建的域自适应分类器,对高分辨率航空遥感图像进行道路粗分类,提高分类的泛化能力。最后对粗分类后的道路利用数学形态学的方法进行修补,获得最终的完整道路。
1 道路图像特征抽取
1.1 纹理特征抽取
本文利用地统计学抽取高分辨率航空图像中道路的纹理特征。地统计学研究的对象是区域化变量,以变异函数为主要工具,研究样本在空间分布上的空间相关性和变化性[10]。变异函数定义为在任意方向上,相距h的2个区域变化量Z(x)与Z(x+h)的方差。假设区域变化量Z(x)满足(准)二阶平稳条件,则变异函数γ(h)定义为:

式中,Z(xi)与Z(xi+h)分别为在空间位置xi和xi+h上的变量的属性值;N(h)是xi和xi+h之间像元对的数目,i=1,2,…,N(h)。
将变异函数引入到二维区域变化中,设Z(i,j)为二维区域变化量,则东西方向上的变异函数为:

式中,Z(i,j)为像元(i,j)的属性值;h为2点之间的距离,N(h)为相距为h的点对个数。
南北方向上的变异函数为:

西北-东南方向上的变异函数为:

东北-西南方向上的变异函数为:

利用移窗法,分别计算窗口内上述四个方向上的变异函数值,用来描述航空高分辨率遥感图像道路的纹理特征。
1.2 光谱特征抽取
本文结合三维小波变换抽取航空高分辨率遥感图像的光谱特征。同一时间同一地点获取的多波段航空高分辨率遥感图像可构成三维图像,其中两维是空间方向,另外一维是谱方向。对该三维图像进行1次三维小波分解,可产生LLL、LLH、LHL、LHH、HLL、HLH、HHL和HHH 8个子代。本文选取一个低频子代LLL和3个光谱差异子代LLH、LHH、HLH用来描述航空高分辨率遥感图像的光谱特征。
2 道路图像粗分类
2.1 域自适应分类器
传统的神经网络、SVM等机器学习算法对于样本来自不同分布的有限标签模式的分类和回归预测并不鲁棒,迁移学习的目的在于借助相关场景的数据来提高当前场景系统的泛化能力[11]。域自适应学习方法是一类重要的迁移学习方法,能有效利用源域中大量标签数据来学习仅有少量标签数据的目标域[12-14]。本文利用迁移最小方差支持向量机模型构建域自适应分类器,实现道路图像的粗分类。
迁移支持向量机学习是在标准SVM决策函数基础上增加一个“Δ函数”,使其在不同域中能更好地自适应,即迁移支持向量机的决策函数为[15]:


式(8)对应的拉格朗日形式为:

式中,αi≥0为拉格朗日乘子,根据Karush-Kuhn-Tucker(KKT)条件得到:
根据上述KKT条件可以得到如下线性方程组:

式中,y=(y1,…,yn)T;Ω=ZZT,Z=[y1Φ(x1),y2Φ(x2),…,yNΦ(xN)];I=(1,…,1)T;a=(α1,…,αN)T;I为单位矩阵。
设a*、b*是上述线性方程组的解,则迁移支持向量机的决策函数式(7)可以表示为:

式中,K(xi,xj)是核函数,比如可以取RBF核
2.2 粗分类步骤
采用上述由迁移支持向量机模型构建的域自适应分类器进行航空高分辨率遥感图像道路粗分类,步骤如下:
1)从多源多时相高分辨率航空遥感图像中获取道路和非道路图像样本集。
2)利用地统计学抽取样本的时域纹理特征,利用三维小波变换抽取样本的频域光谱特征,结合时域纹理特征和频域光谱特征构成样本的特征向量集合。
3)利用样本的特征向量集合训练由迁移支持向量机模型构建的域自适应分类器,获取式(15)所示的决策函数。
4)抽取待分类高分辨率航空遥感图像时域纹理特征和频域光谱特征构建特征向量,利用步骤3)的决策函数对整幅高分辨率航空遥感图像进行道路和非道路的粗分类。流程图如图1所示。

图1 道路粗分类流程图
经过粗分类,图像被分为待定道路目标以及非道路目标2种情况。其中,待定道路目标包括实际道路以及极少量的纹理特性和光谱特性都与道路相近的城市区域,例如停车场、裸露的地面等。由于高分辨率遥感图像道路细节非常清楚,粗分类后,树木以及道路的车道线等会在分类后的道路中存留漏洞和不连贯地带裂缝,为此,我们利用道路形态特征和数学形态学方法处理粗分类后的待定道路目标,获得最终的完整道路。
3 数学形态学处理
本文选取道路的面积、长宽比、矩形度来描述道路目标的几何形态特征。高分辨率航空遥感图像中的道路目标经粗分类和二值化处理后,其面积不会很小,因此计算分类后各区域的面积,通过设定一个阈值滤除掉小面积非道路目标的斑块。道路具有的独特的线性特征,与房顶、停车场等非道路目标相比,道路目标的长宽比更大,因此可以利用长宽比提取出具有明显线性特征的区域。矩形度定义为目标图像的面积和最小矩形的面积之比,反映了目标图像与矩形的近似程度。
利用上述形态特征,采用数学形态学方法处理粗分类后的待定道路目标。数学形态学中的膨胀算法能够解决道路提取时因车辆或车道线所产生的孔洞问题,腐蚀算法能够消除目标的边界,消除因膨胀运算而产生的噪点。闭运算即先膨胀后腐蚀,填平道路孔洞以及裂缝的同时使断连的道路连接,平滑道路边界。
4 实 验
为了验证本文所提方法的有效性,本部分进行仿真实验。实验所用数据为安徽省淮北市某地区的高分辨率航拍彩色图像,图像大小为512×512,空间分辨率为1.5 m。这些地区的道路环境复杂,包含了居民区、工厂、停车场、植被、裸地等非道路目标,道路目标则包含了主干道、次干道与支路等多尺度的城市道路,见图2。结合地统计学纹理抽取和SVM分类的道路提取方法、文献[16]的道路提取方法和基于数学形态学的道路提取方法被用来与本文所提方法进行比较分析。本文方法所取参数为:地统计学滑窗大小为7×7,非抽样三维小波的分解水平为2,迁移最小方差支持向量机的参数由网格搜索法确定。不同方法的道路提取结果如图3所示。

图2 实验所用源图像
从图3中可以看出,结合地统计学纹理抽取和SVM分类的道路提取方法,将图像中长条形的建筑物边缘、围墙等误识别为道路;文献[16]的道路提取方法和基于数学形态学的道路提取方法将大量与道路相连接的裸地、停车场、厂房等地物误识别为道路;本文将纹理特征和光谱特征相结合构建道路特征,并用迁移支持向量机分类方法提取道路,较好地去除了其他地物的干扰。
对于高分辨率航空遥感图像道路提取效果的评价可用定量分析方法。本文采用完整性、正确性和质量这三个经典的精度指标作为道路提取效果的定量度量标准[17]:


图3 不同方法的道路提取结果

式中,E1,E2,E3分别为完整性、正确性和质量指标;TP(true positive)、FP(false positive)、FN(false negative)分别为正报、误报和漏报。定量评价结果如表1所示。
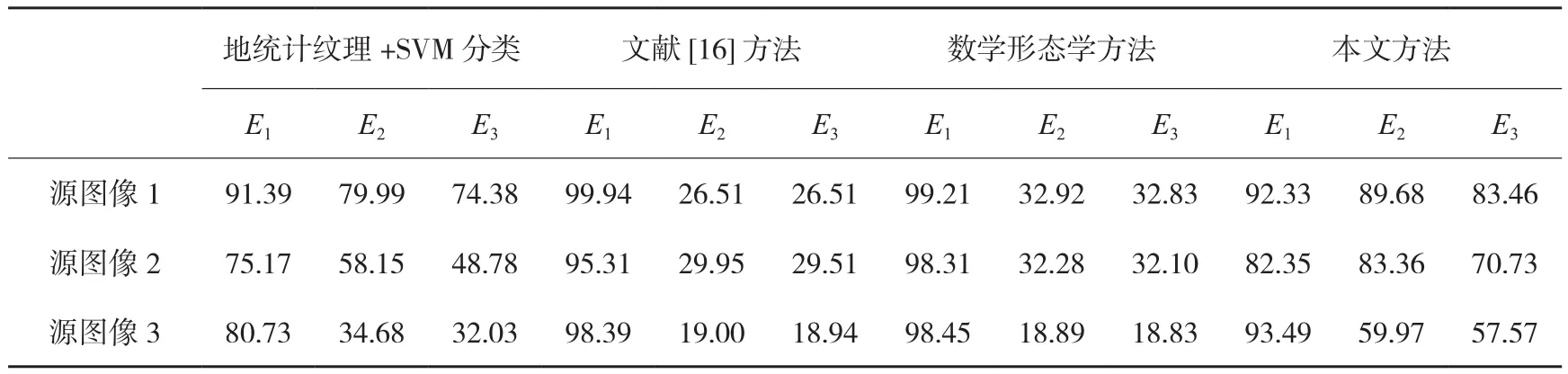
表1 不同方法的定量评价结果/%
从表1可以看出,除完整性指标外,本文道路提取方法的正确性指标和质量指标均高于其他3种方法。本文方法的完整性指标低是因为在利用本文方法进行道路粗分类时将道路中的汽车、遮住道路的植被等分割出去,在提升准确性的同时,降低了道路的平滑性。文献[16]方法和数学形态学方法将图像中汽车以及与道路相连接的裸地、停车场、厂房、路边植物等地物误识别为道路。数学形态学中的开、闭运算方法虽在平滑道路边缘有着极大的优势,但这将使得道路的覆盖范围过宽,完整性指标虽高,但过多地将非道路目标提取为道路会严重影响提取道路的准确性与质量。综合而言,本文所提道路提取方法取得了更好的道路提取效果。
5 结 语
融合时域纹理特征与频域光谱特征等多种特征,训练由迁移支持向量机模型构建的域自适应分类器,并对高分辨遥感影像进行道路粗提取,然后结合道路形态特征,使用数学形态学方法处理粗提取后的影像,获得提取后的完整道路,最后提取道路中心线,建立道路骨架。实验结果表明,本文提出的方法能够有效降低高分辨率航空遥感图像道路提取中非道路目标的干扰,提高道路提取的精确性。多种特征相融合,为道路提取提供了一个良好的途径,但依然很难获得一个通用的线性特征用于不同尺度的遥感图像,对此还需要进行进一步的研究。
[1] Hu X, Li Y, Shan J, et al. Road Centerline Extraction in Complex Urban Scenes From LiDAR Data Based on Multiple Features[J].IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(11):7 448-7 456
[2] Lefèvre S, Courtrai L. Road Network Extraction from Remote Sensing Using Region-based Mathematical Morphology[C].International Workshop on Pattern Recognition in Remote Sensing (PRRS 2014),2014
[3] Ma H,Cheng X,Wang X,et al.Road Information Extraction from High Resolution Remote Sensing Images Based on Threshold Segmentation and Mathematical Morphology[C].2013 6th International Congress on.IEEE,2013(2):626-630
[4] 雷小奇,王卫星,赖均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009(5):457-465
[5] Song M,Civco D.Road Extraction Using SVM and Image Segmentation[J].Photogrammetric Engineering & Remote Sensing,2004,70(12):1 365-1 371
[6] Shi W,Miao Z,Debayle J.An Integrated Method for Urban Main-road Centerline Extraction from Optical Remotely Sensed Imagery[J].IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(6):3 359-3 372[7] Miao Z,Shi W,Gamba P,et al.An Object-Based Method for Road Network Extraction in VHR Satellite Images[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8( 10):4 853-4 862
[8] Yin Dandong,Du Shihong,Wang Shaowen,et al. A Direction-Guided Ant Colony Optimization Method for Extraction of Urban Road Information from Very-High-Resolution Images[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015,8(4): 785-794
[9] Mokhtarzade M,Zoej M J V.Road Detection from High-Resolution Satellite Images Using Artificial Neural Networks[J].International Journal of Applied Earth Observation and Geoinformation, 2007, 9(1): 32-40
[10] 刘爱利,王培法,丁园园.地统计学概论[M].北京:科学出版社,2012
[11] Pan S J,Yang Q.A Survey on Transfer Learning[J].IEEE Transactions on Knowledge and Data Engineering, 2010, 22(10): 1 345-1 359
[12] Pan S J,Tang I W,Kwok J T,et al.Domain Adaption Via Transfer Component Analysis[J]. IEEE Transactions on Neural Networks, 2011, 22( 2):199-210
[13] Duan L X,Tsang I W,Xu D.Domain Transfer Multiple Kernel Learning [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012, 34(3):465-479
[14] Bruzzone L,Marconcini M.Domain Adaptation Problems:a DASVM Classification Technique and a Circular Validation Strategy[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(5):770-787
[15] Yang J,Yan R,Hauptmann A G.Cross-domain Video Concept Detection Using Adaptive SVMS[C].15th Proc of Int Conf on Multimedia, 2007
[16] Ma H,Cheng X,Wang X,et al.Road Information Extraction from High Resolution Remote Sensing Images Based on Threshold Segmentation and Mathematical Morphology[C].6th International Congress on Image and Signal Processing (CISP), 2013( 2): 626-630
[17] Wiedemann C,Heipke C,Mayer H,et al.Empirical Evaluation of Automaticallyextracted Road Axes[J]. Empirical Evaluation Techniques in Computer Vision,1998: 172-187
P237.3
B
1672-4623(2016)06-0018-04
10.3969/j.issn.1672-4623.2016.06.006
张曦,硕士,研究方向为遥感影像道路提取。
2016-03-11。
项目来源:国家自然科学基金资助项目(61401001);安徽省自然科学基金资助项目(1408085MF121)。
猜你喜欢
雷达学报(2020年3期)2020-07-13 02:27:16
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
Coco薇(2017年8期)2017-08-03 15:23:38
Coco薇(2015年5期)2016-03-29 23:22:15
中国继续医学教育(2015年2期)2016-01-06 01:36:16
太空探索(2015年8期)2015-07-18 11:04:44
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:19
航天返回与遥感(2014年4期)2014-07-31 17:47:42
振动、测试与诊断(2014年6期)2014-03-01 01:14:50