基于改进滑模策略永磁同步电机SVM-DTC控制*
2016-12-23 07:27:48孙运全罗青松刘恩杰
电子器件 2016年6期
孙运全,罗青松,刘恩杰
(江苏大学电气与信息工程学院,江苏镇江212013)
基于改进滑模策略永磁同步电机SVM-DTC控制*
孙运全*,罗青松,刘恩杰
(江苏大学电气与信息工程学院,江苏镇江212013)
传统的永磁同步电机直接转矩控制采用双滞环结构,因而电机转矩和磁链脉动较大。SVM控制方法通过合成最合理的电压矢量对转矩和磁链作精确补偿,能够一定程度上降低二者的脉动,但传统SVM控制方法包含了转速和转矩两个PI调节器,两个调节器的参数设计比较复杂,且直接影响了电机性能。提出用快速终端滑模(FTSM)控制器来代替传统PI转速调节器,为了克服滑模带来的抖振,设计负载转矩观测器,并将观测值反馈至滑模控制器。仿真和实验结果表明所提控制方法改善了系统的动静态性能,抗干扰能力增强,同时SMC固有抖振现象得到有效抑制。
永磁同步电机;直接转矩;快速终端滑模;负载转矩观测器;空间矢量脉宽调制
永磁同步电机PMSM(Permanent Magnet Synchro⁃nous Motor)以其体积小、结构可靠、运行效率高等突出优点受到了人们越来越多的关注,在航空航天、家用电器、数控机床等领域获得了广泛运用[1-2]。永磁同步电机的直接转矩方案具有结构简单、转矩响应快、对电机参数鲁棒性好等优点,所以受到众多学者的关注。传统的直接转矩控制虽然具有很多突出优点,却是以牺牲转矩和磁链的控制精度为代价的。为了解决这些问题,众多学者做了大量工作,提出了基于空间矢量调制技术的直接转矩控制SVM-DTC(Direct Torque Control based on Space Vector Modulation)方案[3-5],该方案在一定程度上降低了转矩和磁链脉动。
为了克服传统SVM控制方法中PI调节器在控制方面的欠缺[6],国内外学者将现代控制理论中的一些新方法引入了PMSM-DTC系统中,这些方法主要有滑模控制(SMC)、模糊控制、神经网络等等,它们为DTC算法注入了新的活力,对提高系统静、动态性能起到了一定作用[7-8]。由于滑模变结构控制对系统的参数变化和外界扰动具有完全的自适应性,适用于解决非线性系统运动跟踪、不确定系统控制等问题,因此被人们引入PMSM-DTC系统来改善系统性能。
本文从实际应用角度,根据PMSM直接转矩调速系统的特点,设计了一种快速终端滑模控制器来代替传统的PI控制器。SMC系统抗干扰能力的增强是通过增大切换增益来实现,而切换增益的增大会使系统的固有抖振增强[9]。为了解决二者矛盾,设计一种负载滑模观测器,将观测到的负载转矩值融入滑模控制器中,降低切换增益的幅值,有效抑制了控制器的抖振。搭建永磁同步电机控制系统,仿真和实验结果表明,所提出的控制策略能快速精确跟踪系统给定速度,改善了系统的动静态性能,抗干扰能力增强,同时SMC固有抖振现象得到有效抑制。
1 永磁同步电机数学模型
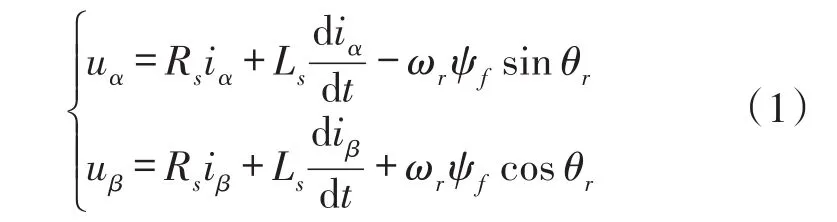
以面贴式PMSM为例,为了尽可能降低电机结构的复杂度,忽略铁芯等因素影响,αβ轴系下,电压方程为:
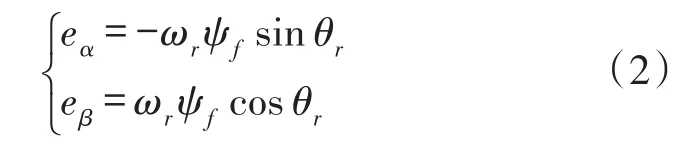
定义反电动势为:
转矩方程为:

电机的运动方程如下:

式中,uα、iα、ψα、eα和uβ、iβ、ψβ、eβ分别为α轴与β轴上定子电压、电流、磁链及反电动势的分量;Rs与Ls分别为定子电阻和电感;Te为电磁转矩;ψf为转子磁链;ω为转子的电角速度;θr为α轴与d轴夹角,即转子位置角;TL为负载转矩;J为转动惯量;np为极对数。
2 基于改进滑模策略永磁同步电机SVM-DTC系统及预期电压矢量原理
采用改进滑模控制器的永磁同步电机SVMDTC系统如图1所示。速度传感器得到的电机实际速度与给定速度比较后其差值经过滑模控制器得到给定转矩,而负载转矩滑模观测器所观测负载转矩值反馈至滑模控制器,快速跟踪负载转矩变化,使抗干扰能力增强的同时抑制了滑模固有抖振。利用比较所得到的电磁转矩误差经过PI调节器得出转矩角变化量,计算预期电压矢量[10]作为SVPWM的控制输入来实现转矩和磁链的控制。其中预期电压矢量的生成、控制及抑制转矩脉动原理分析如下。

图1 采用模糊滑模控制的永磁同步电机SVM-DTC系统
PMSM运行时的磁链矢量如图2所示,其中ψs为实时观测所得到的定子磁链矢量。定义ψref为目标磁链矢量,它的长度由定子磁链给定大小决定,方向为ψs的方向角θs加功率角增量Δδsf。而Δδsf是由实时观测的电磁转矩Te与给定转矩之误差经转矩调节器而得,包含了转矩的调节信息。因而目标磁链矢量ψref同时包含了磁链和转矩的校正信息,故只要令观测到的磁链矢量ψs不断跟踪目标磁链矢量ψref即可达到实时控制转矩和磁链的目的。
在图2中,将ψs与ψref的关系ψref=ψs+Δψs写成αβ轴的分量形式,得:

又在SVPWM的一个采样周期Ts内,将定子磁链的电压模型写成αβ轴的分量形式,得:

联立式(5)、式(6)即可根据误差实时生成所需的连续可变的预期电压矢量u→s作为SVPWM控制的输入,从而达到磁链与转矩的调节目标。可以看出,与传统DTC相比,这种SVM-DTC的控制方式不但可以使逆变器的开关频率恒定,更可以实时根据转矩与磁链误差生成真正合适的电压矢量,扩大了电压矢量的选择范围。这从根本上克服了传统方法只使用8个基本电压矢量的选择范围,因而较好地解决了DTC转矩与磁链的脉动问题。而改进滑模控制器的应用在抑制滑模抖振的前提下提高了传统SVM存在的动静态性能及抗干扰能力。
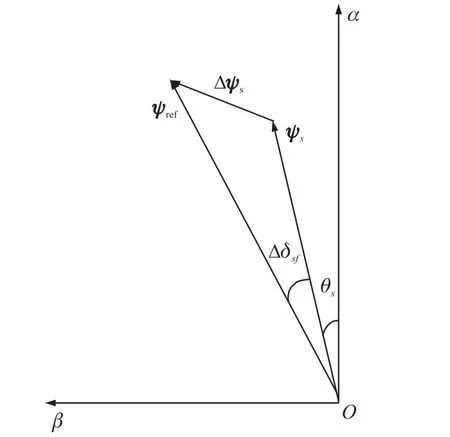
图2 磁链在αβ轴的分量
3 改进滑模控制器的设计
3.1 滑模控制器的设计[11]
滑模变结构控制系统的运动包括趋近运动和滑模运动两部分。趋近运动是系统在连续控制下的正常运动阶段,它在状态空间中的运动轨迹全部位于切换面以外,或者有限穿越切换面;滑模运动是系统在切换面附近,且沿切换面向稳定点运动的阶段。
设计滑模变结构控制器的基本步骤包括个相对独立的部分:
(1)设计切换函数是s(x),使它所确定的滑动模态渐进稳定且具有良好的动态品质;
(2)设计滑动模态控制律u±(x),使得到达条件得到满足,从而在切换面上形成滑动模态区。一旦切换函数s(x)和滑动模态控制律都得到了,滑动模态控制系统就能完全建立起来。
本文通过采用快速终端滑模[12]的控制方法,选择给定转矩作为控制量,设计滑模面为:

式中,e=ω*-ω,其中ω*是转速给定,∂,γ是正数,p和q是正奇数,且有1<p/q<2,当转子转速ω准确跟踪给定转速ω*时可以得到e=0。
则该系统是稳定的,其中k1>0,k2>0,k3>0。

由式(4)可得:

则有:

对式(12)两边求导:

将式(12)~式(14)代入式(11)可得:

最后,将快速终端滑模控制律代入式(14)得:

根据Lyapunov稳定性定理可知,系统稳定的条件为k2>0,k3>0。
很显然,采用以上控制律,本系统可以在有限时间内到达稳定状态,也就是说,e将会收敛到零,而速度ω也会准确跟踪到给定速度ω*。
3.2 负载转矩滑模观测器的设计
上面已经进行了滑模控制器的设计与验证。当存在外界扰动时,可以通过选取较大的k1,k2,k3以提供足够的给定转矩来抑制电机速度变化,这样的结果会加剧固有滑模抖振现象,因此设计了一种负载转矩滑模观测器来实时监测负载扰动,将其变化及时反馈至滑模控制器,抗外界扰动的同时抑制了滑模抖振。
根据式(4)所示PMSM转矩与运动方程,将负载转矩和摩擦转矩统为一个整体进行观测,得电机扩展状态方程为:
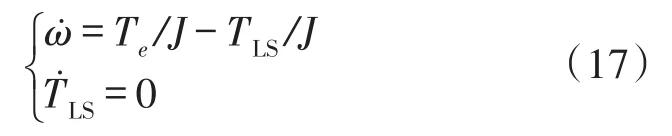
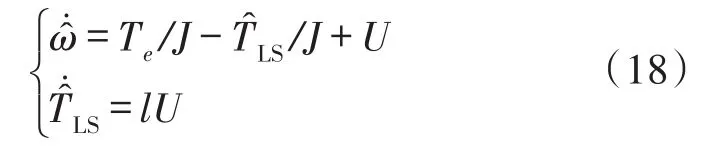
式中:TLS为负载转矩和摩擦转矩之和,称为负载转矩,由于控制器的频率很高,所以认为一个周期内负载转矩为恒定值,即=0。将电机转速和负载转矩作为状态变量,在式(17)的基础上建立扩展滑模观测器为:
将式(18)与式(17)相减得到误差方程为:

其中:e1=-ω为速度观测误差,且选它作为切换函数,即有s=e1,滑模切换面为S(x)=0。e2=-TLS为负载转矩观测误差。

简化可得k的取值范围为:

当滑模观测器进入滑动模态,即s=ṡ=0,代入式(19)可得:

由式(22)可得:

式中:c为常数,可见误差e2随时间趋向于零,速度取决于l的大小。负载转矩观测器的结构框图如图3所示。
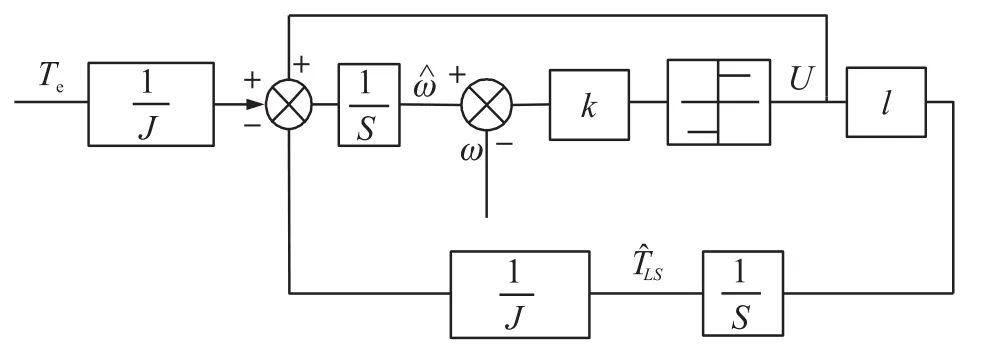
图3 负载转矩观测器框图
4 仿真与实验结果分析
4.1 仿真结果分析
为了验证本文所设计模糊滑模控制算法的正确性,对PMSM调速系统进行了仿真,所采用的电机参数为:极对数np=4,定子电阻Rs=1.3 Ω,d轴电感Ld等于q轴电感Lq,即Ld=Lq=3.6 mH,永磁体磁链ψf=0.175Wb,转动惯量J=0.000 8 kg·m2,摩擦系数Bm=0。快速终端滑模控制器的参数为:γ=150,p/q=1.2,k1=200,k2=80,k3=50。
比较各种情况下系统的仿真结果:
(1)当电机在给定转速下稳定运行,突增负载到10 N·m时负载转矩滑模观测器的观测值如图4所示,由图可知,负载滑模观测器能快速、准确地观测到负载转矩的变化。
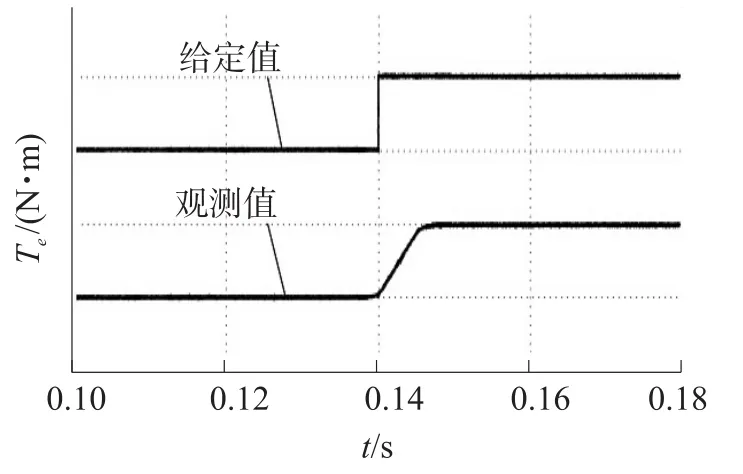
图4 转矩观测值与实际值
(2)当电机给定速度n=800 r/min,外加负载TL从10 N·m突变到15 N·m时基于模糊滑模的SVM-DTC与传统的SVM-DTC调速系统的仿真结果如图5、图6所示,从结果可以看出,采用模糊滑模调速系统比传统的动态响应性能更优,转速迅速上升且超调较小,当负载突变时,系统恢复平衡稳定所需时间更短。

图5 变载时基于模糊滑模的SVM-DTC的转矩、转速曲线
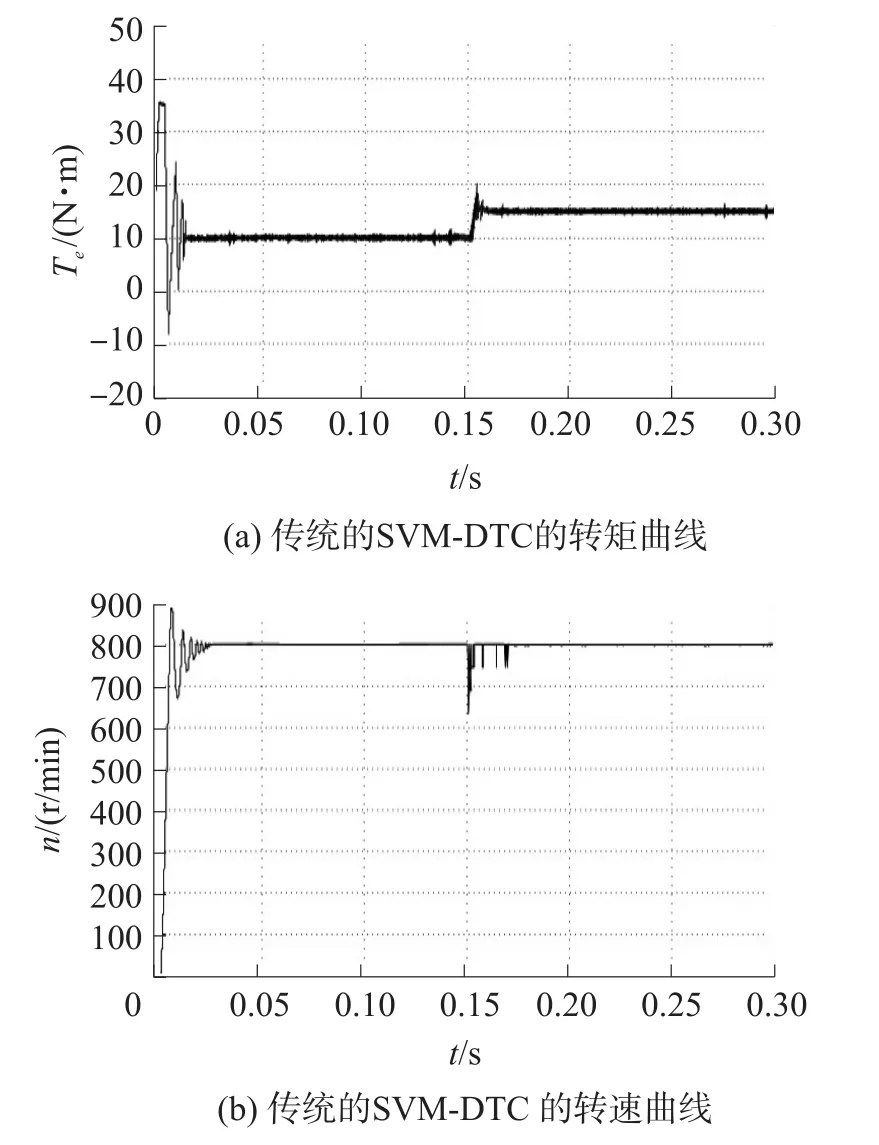
图6 变载时传统的SVM-DTC的转矩、转速曲线
(3)电机带负载 TL=10 N,给定速度从n= 800 r/min突变到n=400 r/min时的仿真结果如图7、图8所示,从仿真结果可以看出,当电机给定速度发生突变时,采用滑模控制器的调速系统更快重新达到稳定状态,转矩和速度振动的幅值较小。
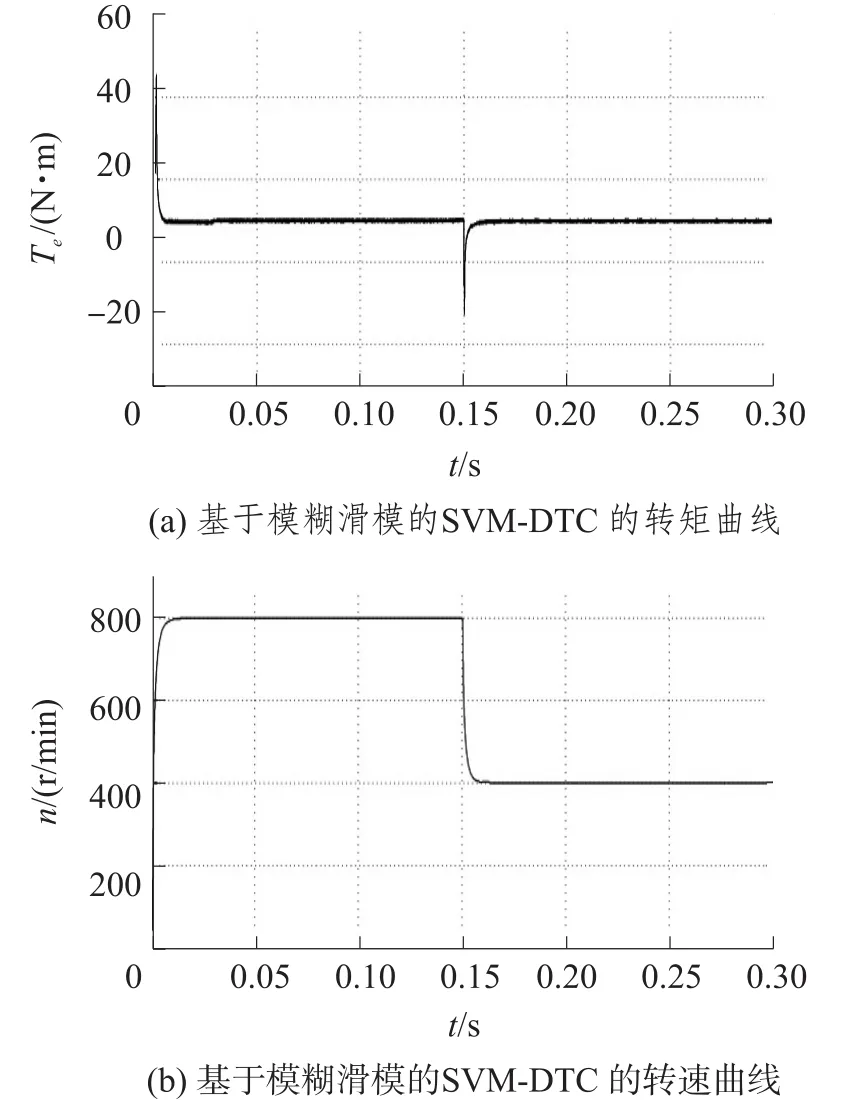
图7 变速时基于模糊滑模的SVM-DTC的转矩、转速曲线

图8 变速时传统的SVM-DTC的转矩、转速曲线
4.2 实验结果分析
根据图1所示的控制策略构建系统,整个系统是采用基于TMS320F2812 DSP芯片的调速实验平台如图9,对该控制策略进行验证实验分析,永磁电机为2 kW,当给定速度为500 r/min,负载转矩为2 N·m的启动波形如图10,通道1为速度,通道2为转矩,通道3为电流。速度控制系统启动响应快速且平稳,电机不到1 s后运行平稳。

图9 实验平台

图10 电机启动曲线
系统稳定运行在500 r/min过程中,突降负载实验波形如图11,可以看出,突降负载后,电机在经过短时间调整后总能保持速度为原来的状态,速度波动不大,系统具有较强的抗负载冲击能力。

图11 突降负载曲线
电机在600 r/min带负载长时间稳定运行一段时间,此时带负载降速至200 r/min,图12为对应的波形,从图中可以看出,电机的转速过渡平稳,转矩脉动较小,系统具有较强的抗干扰能力和鲁棒性。

图12 速度突变波形
5 结论
在深入分析永磁同步电机数学模型和控制方法的基础上,提出了一种改进方案的空间电压矢量调制的永磁同步电机直接转矩控制。采用快速终端滑模控制器来代替传统的PI控制器,解决了传统的直接转矩控制带来的一系列问题,同时保证SVMDTC的优良控制性能,提高了电机的动态响应性能及静态稳定性,调速系统的抗外界干扰能力增强,鲁棒性提高。结合负载滑模观测器,将观测到的负载转矩值反馈到滑模控制器中,降低切换增益的幅值,在抗干扰能力增强的同时有效抑制了控制器的固有抖振。同时滑模控制器的使用避免了两个PI调节器之间相互影响,参数整定复杂的问题。仿真和实验结果证明了该控制策略的有效性。
[1]Rao J S,Sekhar S C,Raghu T.Speed Control of PMSM by Using DSVM-DTC Technique[J].International Journal of Engineering Trends and Technology,2012,3(3):281-285.
[2]韩建群,郑萍.一种用于电动汽车的永磁同步电机直接转矩控制的简化方法[J].电工技术学报,2009,24(1):76-80.
[3]Zhong L,Rahman M F,Hu W Y,et al.A Direct Torque Controller for Permanent Magnet Synchronous Motor Drives[J].IEEE Trans⁃actions on Energy Conversion,1999,14(3):637-642.
[4]赵辉,鲁超,冯金钊.基于SVPWM的永磁同步电机控制策略研究[J].电测与仪表,2009,46(7):13-16.
[5]Chunmei Z,Heping L,Shujin C,et al.Application of Neural Net⁃works for Permanent Magnet Synchronous Motor Direct Torque Control[J].Journal of Systems Engineering and Electronics,2008,19(3):555-561.
[6]孙强,程明,周鹗,等.新型双凸极永磁电机调速系统的变参数PI控制[J].中国电机工程学报,2003,23(6):117-122.
[7]王华,邹积浩.基于模糊逻辑的直线永磁同步电机直接推力控制[J].电子器件,2008,33(6):2280-2283.
[8]陈硕,林小武.基于非奇异终端滑模的永磁同步电机无速度传感器直接转矩控制[J].福州大学学报(自然科学版),2013,41(5):875-881.
[9]刘颖,周波,方斯琛.基于新型扰动观测器的永磁同步电机滑模控制[J].中国电机工程学报,2010,30(9):80-85.
[10]Sun D,Zhu J G,He Y K.A Space Vector Modulation Direct Torque Control for Permanent Magnet Synchronous Motor Drive Systems[C]//Power Electronics and Drive Systems,2003.PEDS 2003.The Fifth International Conference on.IEEE,2003,1:692-697.
[11]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社有限公司,2005.
[12]齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].华东理工大学,2013.
孙运全(1969-),男,汉族,山东莒南人,教授,博士,研究方向电力系统电能质量控制,新能源电动车辆控制等领域,sunyunquan99@126.com;

罗青松(1990-),男,汉族,湖北黄石人,硕士研究生,研究方向为电力电子与电力传动,791182694@qq.com。
SVM-DTC System for PMSM Based on a Novel Sliding Mode Controller*
SUN Yunquan*,LUO Qingsong,LIU Enjie
(College of Electrical and Information Engineering,Jiangsu University,Zhenjiang Jiangsu 212013,China)
The traditional direct torque control(DTC)of permanent magnet synchronous motor adopts double hyster⁃esis control,thus the motor torque and stator linkage flux ripple are large.SVM control method is based on the accu⁃rate compensation of stator flux linkage and torque by synthesizing the most reasonable voltage vector,so it can re⁃duce the ripple to a certain extent.However,two PI regulators are included in traditional SVM method,one is speed regulator and the other is torque regulator.Design of Parameters of the two PI regulators is complex and the motor performance is affected by these Parameters directly.The paper used fast terminal sliding mode(FTSM)controller to replace the speed PI regulator.In order to reduce the chattering of sliding mode,a load torque observer which the observation used in the sliding mode control is designed.The simulation and experiment results show that the pro⁃posed control method can improve the dynamic and static performance of the system,and the system has a great im⁃munity.In the same time,the inherent chattering phenomenon is effectively suppressed.
permanent magnet synchronous moto;direct torque control(DTC);fast terminal sliding mode(FTSM);load torque observer;space voltage vector PWM(SVM)

TM351
A
1005-9490(2016)06-1531-06
8380
10.3969/j.issn.1005-9490.2016.06.048
项目来源:江苏大学高级人才项目(13DG054)
2015-12-20 修改日期:2016-01-20
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年10期)2016-04-12 00:26:38
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30