
基于硬件在环的车身电子稳定系统自动化测试研究与应用
2016-12-22 03:16:00王爱春吴方义刘卫东刘贵涛燕冬彭晨若万丽琴
汽车电器 2016年11期
王爱春,吴方义,刘卫东,刘贵涛,燕冬,彭晨若,万丽琴
(江铃汽车股份有限公司,江西南昌 330001)
基于硬件在环的车身电子稳定系统自动化测试研究与应用
王爱春,吴方义,刘卫东,刘贵涛,燕冬,彭晨若,万丽琴
(江铃汽车股份有限公司,江西南昌 330001)
介绍ESP(车身电子稳定系统)硬件在环自动化测试系统的搭建和应用,基于Matlab/Simulink建立了ESP仿真模型,利用dSPACE的上位机软件和板卡搭建了ESP硬件在环测试平台,实现了系统的开、闭环调试,并以1条测试用例为例,详细介绍自动化测试流程和ESP HIL(硬件在环)测试的应用。测试结果表明:该系统符合开发测试的要求,为ESP的快速开发测试提供了一条有效途径。
硬件在环;车身电子稳定系统;自动化测试
汽车车身电子稳定控制系统是车辆新型的主动安全系统。近年来,市场对汽车安全性能要求不断提高,促使各整车企业加强了对ESP(车身电子稳定系统)的开发和测试。HIL测试作为一种新型的开发测试手段,其精度高,且能够实现自动化测试的优点,对产品性能和品质的提高具有极大的促进作用。目前,HIL测试在国外ESP的开发测试中应用比较广。在国内,HIL测试主要应用在BCM(车身控制模块)的开发测试中[1-2],技术已经相对比较成熟,因为BCM的测试不涉及到复杂的仿真模型;在ESP的开发测试中还鲜有应用,只有少数整车企业和大学开展了一些关于ESP硬件在环测试平台搭建的研究[3-6]。本文将基于HIL测试在一款研发车型ESP开发测试中的应用,介绍ESP的虚拟仿真模型建模和仿真平台搭建及其自动化测试应用。
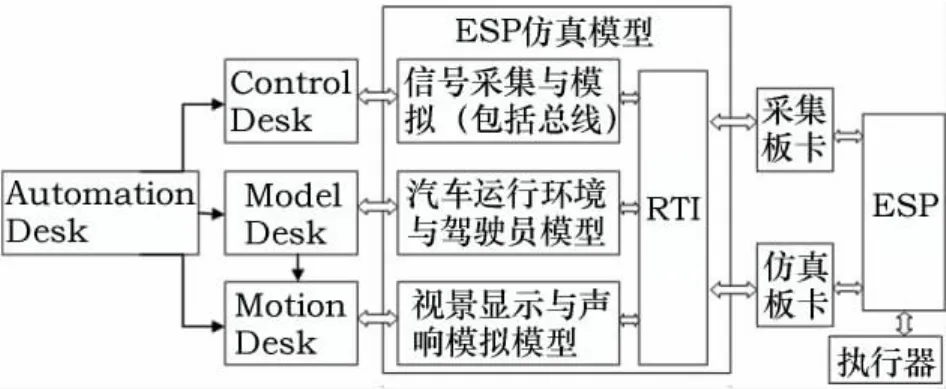
图1 ESP HIL自动化测试系统结构图
1 ESP硬件在环自动化测试系统介绍
如图1所示,ESP硬件在环自动化测试系统由上位机、ESP仿真模型和机柜3个部分组成。上位机是由dSPACE公司开发的软件平台组成;ESP仿真模型是整个测试系统的核心部分,为ESP的正常工作提供虚拟实车环境;机柜主要包括仿真与采集板卡、真实ESP控制器、电源和执行器。汽车ESP硬件在环自动化测试系统的设计思想是:把真实的控制器放置在一个虚拟整车的环境中,通过实时仿真接口RTI和I/O板卡、通信板卡和传感器仿真板卡,与运行在4核处理器板卡DS1006中的车辆动力学模型连接在一起,再辅助以各种上位机软件,构成一个完整的硬件在环自动化测试系统,实现“人-车-环境”的闭环仿真[7]。
2 ESP硬件在环自动化测试系统搭建
2.1 ESP虚拟仿真模型建模
HIL仿真是一种半实物仿真,但与传统的半实物仿真控制器为虚拟模型不一样,硬件在环的虚拟部分为整车,实物为控制器,是一种针对真实控制器的半实物仿真。所以进行ESP虚拟仿真建模,就是要建立起ESP的虚拟运行环境,对其运行环境与输入的各参数条件进行建模仿真,构建ESP的虚拟运行环境。图2为虚拟整车仿真模型原理结构图,主要包括5个部分:虚拟ECU(电子控制单元)、发动机模型、传动系统模型、整车动力学模型和驾驶环境。无论是多个ECU系统级的测试,还是单个ECU单节点的测试,都必须严格按照图2所示的结构来构建仿真模型,这样才能保证结构的统一性和条理性,同时方便模型的集成和拆分。

图2 虚拟整车仿真模型原理结构图
具体到ESP的建模,典型的汽车电子稳定控制系统主要由传感器、ECU和执行器三大部分组成。传感器需要模型和板卡的仿真,而且是仿真的关键信号,直接影响到测试结果的准确性,主要包括4个轮速传感器、转向盘转角传感器、侧向加速度传感器、横摆角速度传感器、制动主缸压力传感器等。执行器部分采用真实件,包括液压回路的电磁阀和制动卡钳,但需要对执行器的动作进行回采,形成闭环控制。ECU是真实件,主要作用是监控汽车运行状态,与EMS(发动机管理系统)联动,可对发动机动力输出及制动系统进行干预和调整[8]。除此之外,该系统正常工作还涉及到一些关键输入信号和驾驶环境的模拟,比如启动信号的输入、制动踏板和油门信号的输入、车辆动力学的模拟、轮胎模拟、道路仿真和车辆驾驶仿真等。
按照信号类型的分类,构建的ESP HIL仿真模型如图3所示。本系统使用Matlab/simulink进行模型搭建,主要包括ESP_MDL模块和ESP_IO模块。ESP_MDL包括了计算转矩、制动系统、轮胎模型、悬架、六自由度整车、道路、操控和驾驶员的模型。在ESP_MDL中还有比较特殊的一部分就是虚拟ECU,在ESP单个控制器的虚拟仿真模型中,没有真实的EMS和TCU(自动变速器控制单元)。但是ESP的正常工作与EMS和TCU有着密切的联系,所以在ESP的虚拟仿真模型中需要将EMS和TCU配置成虚拟ECU,将所有需要的信号通过总线仿真的形式输入给ESP的模型。ESP_IO包括了仿真轮速、横摆角传感器、采集12路电磁阀信号、采集2个卡钳力的信号和残余总线仿真。

图3 ESP HIL测试仿真模型
2.2 ESP测试系统机柜搭建
首先统计ESP所有的输入输出信号,并将信号按照类型进行分类,计算出所需要的I/O板卡、通信板卡和传感器仿真板卡种类和数量,然后就可以进行机柜的布局和搭建。
该款车型所选用ESP为46个引脚,经过统计分配,本测试机柜用了5块I/O板卡、4块CAN卡、7块FIU板卡、10块转接板卡、5块传感器仿真专用板卡等共计40块板卡。如图4所示,整个机柜包括电源开关部分、程控电源部分、FIU板卡部分、BOB部分、执行器部分、处理器部分以及输入输出连接头等部分。该机柜满足ESP的测试需求,并有足够的冗余,为ESP的升级换代所用。

图4 ESP HIL测试机柜
2.3 ESP测试系统上位机组成
上位机是由德国dSPACE公司开发的几款商业软件。
1)Control Desk基于模板,按项目测试需求添、减控件,进行模型信号与控件的关联,搭建控制界面,如图5所示。

图5 ControlDesk监控界面
2)Automation Desk图形化的编程语言,可以直接拖拽,使用简单方便。
3)Model Desk对ESP的运行环境进行配置,包括路面和驾驶方式,如图6所示。
4)Motion Desk直观地监控车辆运行状态参数和环境,如图7所示。
需要注意的是,所有软件必须加载Matlab/Simulink编译模型生成的同一.sdf文件。
图6 ModelDesk车辆驾驶和路面配置

图7 MotionDesk图像化监控界面
2.4 测试系统调试
整个硬件在环自动化测试系统搭建完成后,需要对该系统进行调试,主要目的是为了对系统进行联调,保证测试的准确性,不会因为测试设备的问题而引起测试错误。调试主要包括激励、开环和闭环测试,激励测试只需要确认机柜通道为导通且无串线即可,开环测试需要输出随着输入的变化而变化,闭环测试是在开环的基础上加入模型控制,是最精确的调试,闭环调试通过后,就可以进行ESP的开发与自动化测试工作。
3 ESP硬件在环自动化测试应用
3.1 自动化测试流程
整个平台搭建调试好后,就可以进行ESP的手动测试工作,但HIL测试优势在于可以进行自动化测试,节省大量的测试执行时间,使开发者把主要工作放在精细模型、优化测试用例和结果分析上面。自动化测试的流程如图8所示,首先根据测试需求编写测试用例,然后根据测试用例搭建测试序列,序列搭建好后就可以执行自动化测试,最后是结果分析与报告管理。下面将以ESP的HIL自动化测试为例,完整介绍整个自动化测试流程。

图8 自动化测试流程
3.2 ESP自动化测试应用
1)测试需求测试3个ECU能否正确在低附着路面制动停车。
2)测试用例描述使车辆驶入目标道路:直线路面,长度5km,宽3.5m,附着系数为0.3;操作加速踏板获得60 km/h稳定车速;松开加速踏板;开始采集;制动踏板在时间0.1 s内踩到60%,使车辆停在目标道路上,该过程中转向盘保持不动。
3)转化为流程图流程图的好处就是将测试用例中语言的描叙图形化,可以方便序列的搭建。流程图如图9所示。

图9 流程图
4)建数据字典对有用的变量进行整理,方便调用。
5)建基本动作库对一些基本操作(如:上下电、踩油门、踩制动踏板等)进行建库,方便测试序列的搭建。
6)测试序列有了数据字典和基本动作库后,建序列就是从建好的数据字典和基本动作库里面拖拽库或变量,简单方便。如图10所示。
7)Python语言编写评价判断Automation Desk提供了多种评价方式,简单的评价可以通过写Python语言实现,复杂的评价可以通过构造参考曲线来实现,本条测试用例就是利用构造参考曲线来进行评价判断结果是否正确,如图11和图12中的参考曲线。
8)测试执行可以逐条执行测试序列,也可以批量执行。
9)测试结果分析自动生成测试结果和详细报告,并对重要的变量曲线进行绘图,帮助分析。由图11和图12可得出,在整个制动过程中,轮速是波动减小,反应出卡钳时松时紧,进而不会让车轮抱死。根据制动曲线,还能得出最优制动曲线对应的制动参数,帮助ESP的开发。

图10 测试序列

图11 轮速与参考曲线的比较图

图12 车速与参考曲线的比较图
4 总结
HIL自动化测试系统可用于整车开发中各控制模块功能测试、通信测试、故障诊断测试及预标定测试。在产品开发早期进行验证测试,模拟各种复杂、极限工况,提前发现设计问题进行整改。本文介绍了一款在研发车型ESP硬件在环自动化测试系统的搭建和应用,并以1条测试用例为例,详细介绍了自动化测试流程和ESP HIL自动化测试的应用。通过在实际项目中的应用,进一步体现了HIL测试的优势,说明了ESP硬件在环自动化测试平台可以保障人员的安全,缩短ESP的研发周期,降低开发成本,是快速开发ESP的有效途径。
[1]焦合美,孙华锋,徐兰欣,等.车身硬件在环系统建设浅谈[J].汽车电器,2015(4):56-58.
[2]刘卫东,王爱春,吴方义,等.车身控制模块硬件在环测试系统搭建及测试应用[J].汽车电器,2015(12):50-53.
[3]刘巍,赵向东,李幼德,等.ESP硬件在环试验平台的研究与开发[J].汽车工程,2007,29(9):809-811.
[4]高明,赵楠,张荣芸,等.基于LabVIEW的ESP硬件在环仿真实验台开发及仿真研究[J].汽车零部件,2013(6):53-56.
[5]林波,夏群生,何乐,等.ABS液压混合仿真试验台的研究和应用[J].清华大学学报(自然科学版),2002,42(2):262-265.
[6]王玉伟.基于DSPACE的ESP硬件在环仿真实验台的开发[D].吉林:吉林大学,2011.
[7]丁海涛,郭孔辉,张建伟,等.汽车ESP硬件与驾驶员在回路仿真试验台的开发与应用[J].汽车工程,2006(4):346-350.
[8]陈天殷.车辆电子稳定程序控制系统ESP[J].汽车电器,2015(2):15-18.
(编辑 陈程)
The Research and Application of ESP Automatic Testing based Hardware-In-The-Loop Simulation Technique
WANG Ai-chun,WU Fang-yi,LIU Wei-dong,LIU Gui-tao,YAN Dong,PENG Chen-ruo,WAN Li-qin
(Jiangling Motors Co.,Ltd.,Nanchang 330001,China)
This article introduces the establish and application of ESP Hardware-In-The-Loop(HIL)automatic testing system.ESP simulation model is built based on Matlab/Simulink,and the ESP HIL test platform is set up using host computer and software board of dSPACE,which realizes the open and closed loop testing.A test case example is given to introduce automatic testing process and ESP HIL testing applications.The test result shows that the system meets development requirements,and provides an effective method for ESP quick development testing.
Hardware-In-The-Loop;electronic stability program;automatic testing
U463.61
A
1003-8639(2016)11-0059-04
2016-02-24;
2016-07-20
王爱春(1976-),女,首席工程师,主要从事汽车电子电器产品开发工作;吴方义(1985-),男,工程师,主要从事汽车电控单元开发与自动化测试工作。
猜你喜欢
仪器仪表用户(2021年10期)2021-11-27 08:26:04
铁道通信信号(2020年6期)2020-09-21 09:23:22
铁道通信信号(2020年9期)2020-02-06 09:15:32
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
传感器与微系统(2018年7期)2018-08-29 00:44:18
电子测试(2017年12期)2017-12-18 06:35:23
火控雷达技术(2016年3期)2016-02-06 02:30:33
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01 02:54:29
自动化博览(2014年7期)2014-02-28 22:32:34
