
基于单片机的智能玩具电动车的设计与实现
2016-12-21 07:21胡艳艳
数码世界 2016年12期
胡艳艳
辽宁锦州渤海大学工学院
基于单片机的智能玩具电动车的设计与实现
胡艳艳
辽宁锦州渤海大学工学院
本文设计的基于单片机的智能玩具小车涉及到了硬件设计以及软件设计。而且在硬件设计电路中实现了信号检测电路以及电源电路等,介绍了玩具车的运行原理。以目前的玩具小车为基础,添加了多种传感器,比如红外传感器,通过传感器所形成的信号检测电路对小车的轨迹情况中的数据以及运行的位置,速度等数据信息检测。
单片机 智能玩具 红外传感器
1 智能玩具电动小车技术
随着计算机科学技术的不断发展以及人工智能的进步,玩具小车的发展方向实现了向智能化的改变。关于智能玩具电动小车的控制系统中主要的组成部分有传感以及自动控制方面的技术以及人工智能等,作为综合系统中的一种能玩具电动小车的控制方式可以采用单片机的方式,也可以是采用光学传感器的方式,其次还包括了通过语音进行控制。
2 信号检测电路设计
作为自动检测技术与自动转换结合的一门技术,检测技术的主要目标是提取自动检测系统里面的信息以及对这些信息进行转换和处理信息的过程。检测技术在很多的领域中都得到了广泛的应用,在多个领域中检测技术充当着重要的作用。其中传感器在检测技术中有着重要的地位,传感器相当于人类的五官,人类对一些外在事物的感知都是通过五官得到的,而传感器是智能玩具车感知外在环境不可获缺的器件。如果缺少了传感器就很难做到自动化,也就无法实现所谓的自动控制。
自动检测技术和自动诊断以及自动报警技术都有着直接相连的关系,在自动计量以及自动管理中离不开自动检测技术,自动检测技术的意义十分重大。尤其随着最近几年传感器和微型计算机之间已经实现了很好地结合以后,在智能化的装置中附带着微处理器技术已经越发成熟,而且也做到了将自动控制运用到现实的生产过程中,最终使得劳动生产率得到很大程度的提高,从而实现产品质量的提高,以及劳动强度的降低,并且劳动条件也得到了大大地改善。
3 主控电路设计
3.1 STC89C51单片机硬件结构
本文设计的基于单片机的智能玩具车,所选择的单片机的型号是STC89C51,是该单片机是8位低电压中的一种,而且性能方面很高,是一种CMOS的单片机,单片机中有着随机存取数据存储器以及只读程序存储器,只读程序存储器的容量大小是8Kbytes的,而且该只读程序存储器是能够实现反复擦写的,随机存取数据存储器的容量大小是256bytes。STC89C51芯片是来自ATMEL公司,在STC89C51生产的过程中运用到的技术包括了非易失性存储技术以及高密度技术等。
STC89C51的指令系统和标准的MCS-51是相互兼容的,而且引脚也是与8052相互兼容的。其中在芯片的里面会存在着中央处理器,该中央处理器是8位的,以及相关的存储单元。在很多场合中都会用到STC89C51单片机,尤其是控制起来比较复杂的应用场合。
3.2 红外检测电路设计
本文设计的智能玩具车中设计了红外检测电路,该电路用到了红外传感器,红外传感器是由红外对管形成的,红外对管电路图如图1所示。

图1 红外对管电路
设计的智能玩具小车的前面和周围会增加三对完全一样的红外对管,该红外对管的作用主要是为了对行驶路线所在的前方以及周围的障碍信号进行检测,其中红外对管中都会连接着接收管和发射管,当在红外线通过发射管实现红外线发射的过程中假如发现了前面或者周围出现了障碍物,那么接收管就会接收到反射回来的光信号,如果没有遇到障碍物,信号就会被吸收。当进行电路的检测过程中,如果发现障碍物的接收管没有导通,那么电平的输出值就是高电平,如果接收是导通的,那么电平的输出值就是低电平。根据接收到的电平值得不同,单片机会对小车的行驶路线起到直接的决定性作用。在对障碍进行检测的过程中离不开红外对管的支持,该红外对管是安装在小车的正前方,如果来自小车前面所发射出来的红外光线被直接反射回来的话,这就表明了小车的前面是存在障碍物的,这个时候小车就会根据障碍物的位置做出不同的路线反应。
3.3 电源电路设计
本文设计的智能玩具车的工作电压选择的是+5V,其中每一节电池本身的电压值是1.5V,所以如果小车上所用的电池有4节,那么工作电压就是6V,那么7805的稳压芯片就是必须的。L7805芯片所给予的电流值是低于1.5A的,该电流能够完全达到芯片供电的需求。即使微处理器以及微控制器中不用到支持电路,而且功率损耗也比较低,然而这些因素还是需要考虑的。考虑到直流电机的额定电压比较大而且额定电流也很大的因素,供电电压选择能够选择9V,而且不需要进行降压处理,其中的电机驱动的电源是通过该电压实现的。电源稳压电路如图2所示。
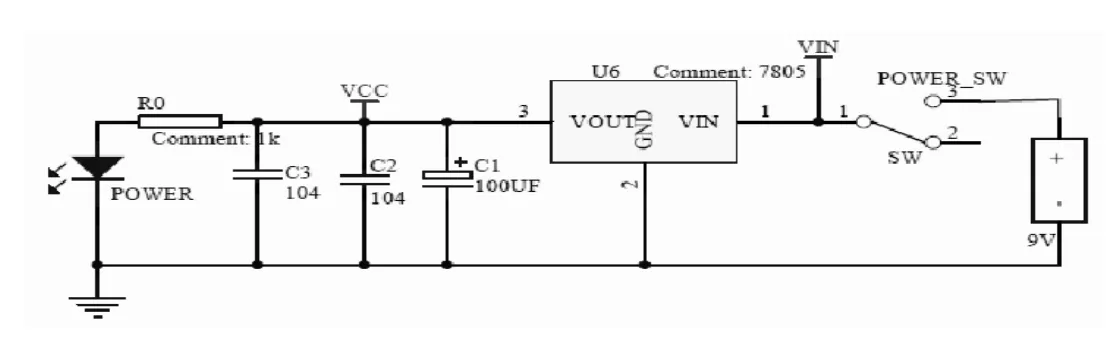
图2 电源稳压电路
4 软件的结构设计
软件控制系统中主要分为数据处理以及过程控制。其中的数据处理能够实现采集数据以及数字滤波等。而过程控制的含义指的是根据特定的算法,实现计算后再输出数据,最终实现生产控制。系统软件结构图如图3所示。

图3 系统软件结构图
具体的工作流程总结为:
先是初始化单片机的上电,接着就会检测,随后按照需求的不同进一步做出处理,其中的具体处理包括了串口通信处理以及正常和故障处理等。所谓的串口通信处理指的是与参数配置界面实现交互数据,实现配置系统操作控制所涉及的参数。所谓的故障处理指的是当对系统上电进行检测的时候,如果发现了故障的情况所做出的处理。当设计系统软件的时候,需要将整个控制系统进行拆分,分成多个子模块,其中的每一个子模块可以称为是控制模块。模块指的是一个小程序段,该小程序段的目的是实现特定的功能而设定的。控制自动生产的时候就需要检测生产的运行状态。而且将生产过程中所涉及到的数字信号,脉冲信号输入系统中,输入的模拟信号不同,会导致传感器接收后所形成的数字信号也不同,信号特征如表1所示。

表1 数字信号特征表
5 结语
现今很多的玩具电动小车的运行轨迹是直线的,也有的是自带开环进行控制的,玩具小车通常的功能主要包括了前移、后退、转弯,左移右移等。而且还可以显示出当前所运动所处的状态。智能玩具电动小车的功能能够依据环境的不同而做出不通过的感知做出反应,同时还能够通过不同的行为控制不同的动作。
[1]许展鹏.基于单片机的智能玩具电动车的设计与实现[J].电脑迷, 2014(3):103-103
[2]彭卫东,周超.具有语音和图像识别及跟踪功能的智能玩具车设计[J].科学技术与工程, 2012, 12(16):3880-3884
[3]齐楠.基于单片机和多种传感技术的智能玩具电动车的设计与实现[J]. 科技创新与应用, 2015(15):44-44
[4]计京鸿,林森,张娜.智能玩具小车的设计[J]. 现代工业经济和信息化, 2015, 5(23):52-53
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
小猕猴学习画刊(2020年8期)2020-07-30
电子制作(2019年7期)2019-04-25
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
少年文艺·开心阅读作文(2018年2期)2018-01-19
小学教学(数学版)(2017年12期)2017-02-15
