FMCW技术在气象雷达中的应用及青藏高原云探测
2016-12-20 08:11:27葛润生
现代雷达 2016年3期
金 龙,阮 征,葛润生,吴 俊,齐 锐
(1. 中国气象科学研究院灾害天气国家重点实验室, 北京 100081)(2. 河北省气象技术装备中心, 石家庄 050021; 3. 安徽四创电子股份有限公司, 合肥 230088)
·总体工程·
FMCW技术在气象雷达中的应用及青藏高原云探测
金 龙1,2,阮 征1,葛润生1,吴 俊3,齐 锐3
(1. 中国气象科学研究院灾害天气国家重点实验室, 北京 100081)(2. 河北省气象技术装备中心, 石家庄 050021; 3. 安徽四创电子股份有限公司, 合肥 230088)
调频连续波技术(FMCW)探测气象目标具有测距测速精度高、测距盲区小、峰值功率低,系统动态范围大,灵敏度高等优势。文中给出了C波段调频连续波雷达(C-FMCW)探测原理、系统构成、微弱信号的定标以及相关微弱信号定标的解决方案。C-FMCW雷达于2014年7月和8月在西藏那曲地区开展了高原观测试验,文中给出了三类典型的高原降水云观测实例,揭示了高原降水云的结构特征。
C波段调频连续波雷达;探测原理;雷达定量标校;青藏高原降水云
0 引 言
近年来,对降水云体的垂直结构探测及其微物理过程的反演研究是降水和云物理方面研究的重点,在微波遥感技术基础上已经发展了多种波长的脉冲多普勒体制垂直探测雷达对其探测研究。调频连续波雷达(FMCW),采用连续波体制通过对频率的调制和解调实现距离测量,通过相干积分技术得到气象信号的谱分布信息。与脉冲体制雷达相比,FMCW雷达系统具有测距测速精度高、测距盲区小、峰值功率低,系统动态范围大,灵敏度高等特点[1],并且脉冲多普勒雷达难以保证在不损失探测能力的情况下获取高的距离分辨率。因此,灾害天气国家重点实验室(LaSW's)在国内首次提出研制C波段调频连续波垂直指向天气雷达(C-FMCW),在对技术需求和对总体技术方案进行论证后,于2013年初研制完成,2013年6月起在安徽定远实施了定量标校并开展了观测试验,于2014年7月~8月在西藏那曲地区进行了高原连续观测试验。

随着FMCW雷达理论水平和技术水平的稳步提高,在针对微弱气象信号回波、降水云体结构识别以及尺度较小,结构变化较快的强对流天气过程中FMCW雷达的精细探测展现出明显优势[11-13]。本文介绍了我国首部应用于天气探测领域的C-FMCW雷达系统的探测原理,阐述了其系统组成以及相关技术难点的解决办法,给出了2014年青藏高原观测试验期间C-FMCW雷达在西藏那曲获取的典型高原云特征。
1 C-FMCW天气雷达
不同于常规用途雷达的点目标,天气雷达的探测对象为时空结构变化迅速的弥散气象目标,其分布在雷达全部探测量程内,这就要求雷达具有时空分辨率高、动态范围大、灵敏度高等性能[14]。C-FMCW天气雷达通过FMCW技术提取回波信号中的距离信息,距离窗函数隔离度高,测距精准,用相干谱分析方法获得各个距离上返回信号的功率密度谱分布,高积累得益提高了系统灵敏度,使得探测信息全面而真实,通过谱分布计算出反射率、径向速度、速度谱宽等谱参数,可以提供降水云体的精细垂直结构和回波强度谱分布数据。
1.1 探测原理
C-FMCW天气雷达的探测原理图,如图1所示。

图1 C-FMCW天气雷达原理示意图
图1上部是发射机输出原理,图1中部给出接收机对数据的解调输出原理,图1下部为信号谱变换处理流程。C-FMCW雷达系统发射调频周期为T的连续波信号由图1上部实线所示,调频带宽为B,在某一时刻t返回到接收天线的回波信号包含了雷达全部作用距离内目标物的信息,其频率覆盖范围仍为B,该回波信号与单频本振信号(图1上部虚线)混频,在τ-2τ的接收机取样周期内对混频后的差频信号解调,即第一次M快速傅里叶(FFT)变换。这里的M是调频周期τ间隔内的取样点数,点数M越多,距离分辨率越高,即调频连续波雷达的距离分辨率与调频带宽B和FFT点数M相关,距离分辨率为Cτ/(2M),C为光速。经过图1中部给出的信号解调处理过程,可以得到每一个距离单元上的功率值。图1下部给出进一步对连续的一系列调频周期解调后的输出结果,按每个距离单元进行第二次N点FFT处理,得到这个距离单元上的功率谱在多普勒速度谱上的分布Si(Vj)(i=1,2,…,m;j=1,2,…,n),由谱分布计算出该距离高度上大气目标物的回波强度Z(i)、速度Vr(i)和谱宽σ(i)等谱参数。
FMCW雷达采用收发分置双天线工作体制,不存在脉冲多普勒雷达单天线收发引起距离盲区等问题[15]。
1.2 C-FMCW天气雷达系统构成
C-FMCW雷达系统由频综和时序控制单元、发射单元、天线单元、接收单元、信号处理单元以及数据处理和显示单元六个部分组成,设备原理框图,如图2所示。
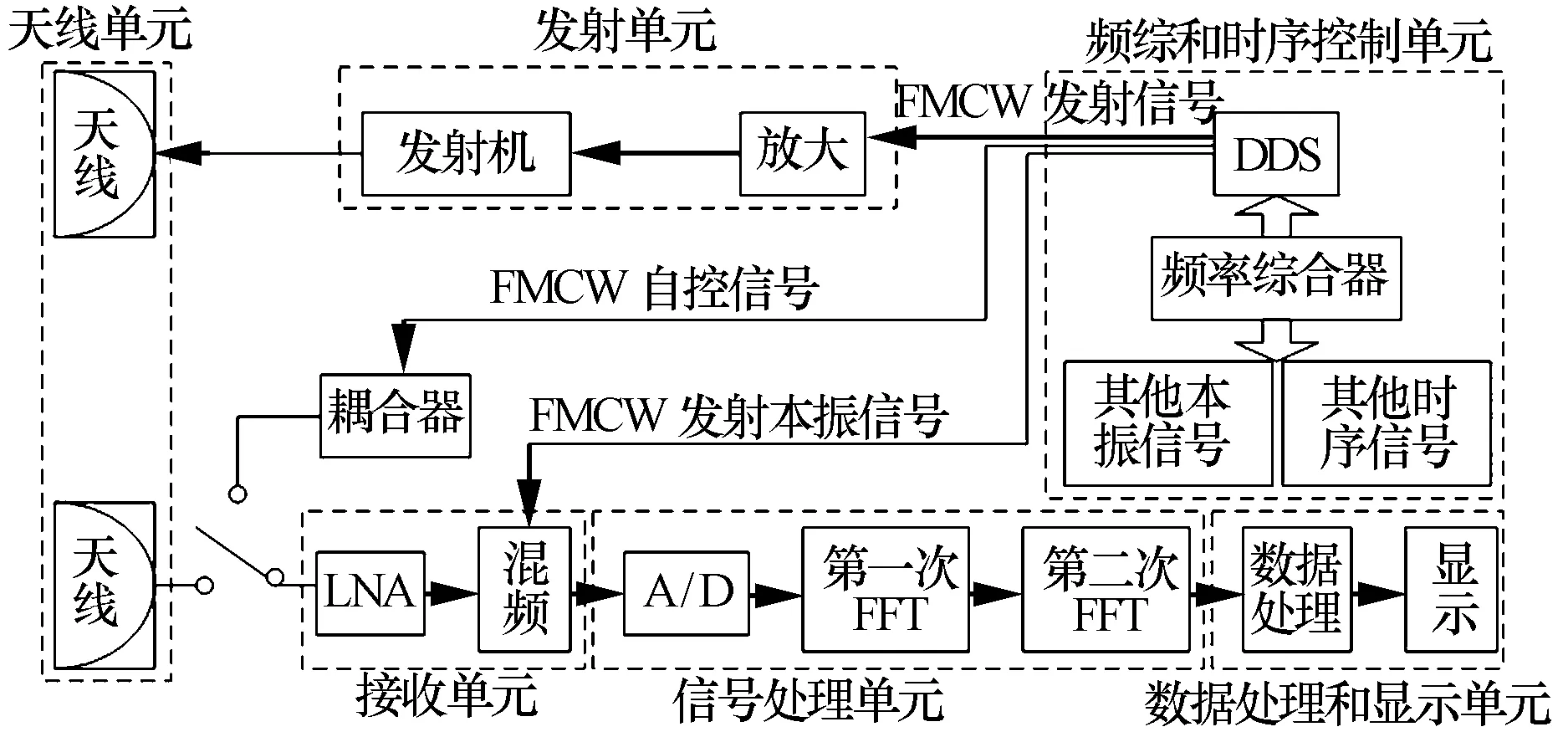
图2 C-FMCW垂直探测雷达结构框图
系统主要分为三条支路,分别为发射支路、接收支路、标定支路。雷达系统运行时,频综和时序控制单元中的频率综合器产生包括雷达系统的各种时钟信号、本振信号等多种频率的信号以保证雷达系统实现全相参处理,其中运用直接数字频率合成(DDS)技术将发射信号变为线性调频信号,经功率组件放大后由发射天线辐射出去;发射天线和接收天线收发分置,两者隔离度优于90 dB;接收到的回波信号经低噪声放大器(LNA)后与发射样本信号以及本振信号混频变为中频信号送入信号处理单元,模数(A/D)转换后,进行第一次加窗和FFT变换,数字窗函数的副瓣抑制性能优于70 dB,对抑制后的调频信号进行FFT变换解调,提取各个频点(对应不同高度)的信号强度。再进行第二次加窗和FFT变换,窗函数的副瓣抑制性能优于45 dB,对同一高度的信号进行FFT变换得到对应高度的功率密度谱分布,之后将谱分布数据送入数据处理和显示单元,进行功率、强度、速度、谱宽等产品的计算和显示。
当雷达工作状态设置为标定模式时,低噪声放大器(LNA)入口端与接收天线断开,与耦合器端连接,DDS产生的幅度、频率、相位可控的中频标定信号,由耦合器将信号馈入接收单元低噪声放大器(LNA)入口端,以实现对回波信号的距离、强度、多普勒特性等的定标。表1给出该雷达系统的主要探测参数。

表1 C-FMCW垂直探测雷达系统主要技术参数
1.3 技术难点
传统连续波雷达一般用于短距离高精度测速测距,一般灵敏度不高,主要的原因是由于收发同步工作,收发隔离不够导致发射信号、杂散、噪声泄漏到接收机,恶化了接收机灵敏度。C-FMCW雷达系统用于气象探测,回波信号动态范围大,对灵敏度要求高,相对于一般的调频连续波系统,C-FMCW雷达系统采用如下五个技术手段解决灵敏度问题。
1) 收发分置的高隔离圆抛物面天线
采用两个收发分置的圆抛物面低副瓣天线,外套屏蔽桶,合理设计天线间间距,优化隔离度性能。另外,在屏蔽桶上沿贴吸波材料,解决爬电效应导致的隔离度下降问题,最终实现92 dB收发隔离指标。高隔离度的天线性能降低了泄漏到接收机的发射主波及噪声幅度。
2) 接收支路大动态设计
即便有90 dB的收发隔离指标,150 W发射机泄漏到接收机的主波幅度依然很大,约为-40 dBm。为保证系统不饱和及模拟接收通道线性,接收机输入端1 dB压缩点设计值约为-20 dBm,远高于系统最大泄漏功率电平,大动态的设计保证了系统不会因为泄漏信号过大而饱和,也保证了系统有较好的线性,降低不同频率回波信号在接收机内部的交调分量,减少产生虚假目标的可能。
3) 高相位稳定度设计
对于调频连续波体制雷达,发射激励信号相位噪声及发射机基底噪声都会恶化系统的灵敏度。针对相位噪声问题,本系统差频处理范围最大2 MHz。方案中针对频率源产生的发射激励信号相对载频2 MHz范围的单边带相位噪声分布特性提出了明确的要求,系统采用高稳定低相噪恒温晶体振荡器作为基准源,高调频线性度的DDS波形发生器,低相噪的直接频率合成器,低噪声全固态发射机,保证了发射信号、本振信号及各种时钟信号的高稳定度。
4) 多普勒处理器
除前面分析的影响灵敏度的因素外,波形、频率综合器及发射机产生的杂散信号也会在系统中产生虚假目标,影响系统灵敏度。为了解决这个问题,系统采用多普勒处理器。从实际探测情况看,杂散信号在相对调频周期是相参的。因此,系统采用二维FFT的处理方式泄漏的杂散信号经过第二维FFT处理后是一个零频信号,信号处理采用插入式补偿式滤波抑制泄漏的杂散信号,并根据回波功率谱分布的情况对抑制的零频信号进行拟合补偿,降低低频回波信号强度损失,保证探测精度。
5) 相参及非相参积累
本系统采用规定垂直指向波束,系统数据更新率为1 s~60 s之间,典型工作状态的数据刷新率约为3 s。系统采用二维FFT处理,具有很高的相参处理得益,除相参处理外,二维FFT处理后的回波功率谱密度分布还可以再进行非相参的频谱积累,进一步提高系统的灵敏度。
2 C-FMCW雷达微弱信号的定标
C-FMCW气象雷达定标的技术难点在于对微弱信号的标定。C-FMCW雷达接收的回波信号经第二次FFT处理输出后得到各距离单元上的功率谱在多普勒速度谱上的分布,已知多普勒速度谱线间隔,因此标定过程是针对功率谱分布中谱线的功率值进行定标[16-17]。C-FMCW雷达采用窄带宽接收机,当距离分辨率为30 m时,单根谱线上噪声功率最小为-166 dBm;当距离分辨率为15m时,噪声功率最小为-169dBm。-166dBm、-169 dBm也为雷达在不同分辨率下的最小可测信号功率。因此,C-FMCW雷达接收信号的定标是对微弱信号的标定。
2.1 谱线噪声功率
C-FMCW雷达第一次FFT解调出返回信号的距离信息,距离分辨率为30 m、15 m时,单个距离库信号带宽分别为2 kHz、1 kHz,输出信号中混有的系统噪声功率PNr与带宽有关
PNr=-114+Nf+10lgBw
(1)
式中:Nf为噪声系数,单位为dB;Bw为带宽,单位为MHz;PNr为单个距离库噪声功率,单位为dBm。C-FMCW系统噪声系数为2 dB,PNr为-139 dBm、-142 dBm。
解调出距离信息后,需要第二次FFT处理方可得到谱分布信息,因此噪声也再次被分解到各个谱线中,单根谱线上的噪声功率为
PNs=PNr-10lgN
(2)
式中:N为FFT处理点数。C-FMCW雷达使用N=512,PNs分别为-166 dBm、-169 dBm。C-FMCW雷达最小可测信号功率为-166 dBm、-169 dBm。
2.2 谱线信号功率的定量标校
雷达系统的定量标校是将标准信号源的输出信号接入到雷达系统,对雷达输出进行定标。目前常规天气雷达中,最小可检测信号功率大约为-115 dBm,经过相干累积处理的风廓线雷达最小可检测信号功率约为-145dBm,C-FMCW雷达的最小信号功率接近-170 dBm,采用常规的方法难以对接收的微弱信号进行定标。
考虑到C-FMCW雷达采用扫频方式窄带宽提高雷达的探测能力,对C-FMCW雷达的定标也采用将标准信号源信号转换为扫频信号来进行定标,点频信号接入DDS后展宽为扫频信号输入C-FMCW雷达,经第一次FFT解调后分布到各个距离库,各距离库上输出的平均信号功率为该调频周期内信号功率的1/K,K是调频带宽与距离库带宽间的频宽比,C-FMCW雷达采用两种调频带宽6 MHz和7 MHz,对应的距离库带宽为2kHz(30m)和1kHz(15m),则K为3000和6 000。输入信号经DDS扫频展宽和第一次FFT分解使得单个距离库信号功率将低了34.8 dB和37.8 dB。通过确定定量标校曲线的线性动态范围,来获取微弱信号的定量测量。
在操作终端将雷达工作方式设置为标定模式,连通标定信号,将外接信号源按照雷达系统的工作频率设置成点频输出,模拟回波信号功率,外接信号源采用HP 83752B,其范围为-85 dBm~15 dBm,为了尽可能减小测量过程中引入的误差,在测试时仅使用了一个50 dB的衰减器,当测试信号降低至-80 dBm时在外接信号源与DDS之间接入衰减器,将信号源信号提高50 dB后继续由大步进减小测试,理论输入单个距离库的功率最小可达-169.77 dBm,满足此雷达定标需求。连续波信号经DDS后信号被展宽,变为正斜率线性调频连续波信号,模拟回波信号频率,为了使系统匹配,采用雷达机内DDS将外接信号源的单频信号展宽,亦即将单频信号变为6 MHz带宽的扫频信号,以此模拟与发射信号带宽相同的气象回波信号。输出信号由接收机最大饱和点大步进减小,持续减小的信号等效为接收机噪声以下的微弱气象回波信号。由于外接信号源为点频输出,一个频点只能模拟一个固定回波功率的信号,经雷达系统处理后信号功率都集中在每一根谱线上,因此用此方法来对任意一根谱线间隔内的2 kHz的窄带信号进行标定。由此得到的C-FMCW雷达系统最小可检测信号为-167 dBm,最大可检测信号为-65 dBm,拟合线斜率为1.004,均方根误差为0.19,系统的动态范围为98 dB,系统回波功率与输入功率之间线性拟合程度很高。
3 高原观测实例
2014年7月和8月,C-FMCW雷达在西藏那曲地区(31°29″N,92°04″E,4 507 m)开展了高原观测试验,检验了雷达在高海拔恶劣条件下的系统性能和探测能力,获取了高时空分辨率的回波强度、垂直速度和速度谱宽等谱参数数据,积累了青藏高原地区宝贵的云和降水云结构的垂直结构探测数据。对高原云观测数据的初步分析,发现高原降水云具有快速生消、发展深厚和多层云的特点,以下给出三种较为典型的高原降水云观测实例。
3.1 深厚对流
图3为2014年7月4日17∶30~19∶15为一次深厚的对流降水过程,17∶00~20∶00地面小时雨量分别为0.6 mm、8.6 mm和1.4 mm,期间有冰雹出现,那曲地区冰雹频发,此类降水云具有高原深对流的典型结构特征。图3a)中回波顶高均达到12 km(AGL,距地高度,下同)、最大回波强度为59.6 dBZ,强的上升、下沉运动交替出现,由于高原地区空气稀薄,云中强上升气流能迅速把大粒子抬升到较高的高度,云中上升下沉往复运动有助于冰雹增长。
降水云体中包含有三个单体结构,单体1出现时间从17∶43~18∶21,持续了38 min,40 dBZ强回波最大高度达6 km,30 dBZ回波最大高度达8 km,云内速度变化较为剧烈。图3b)的速度图中在1 km高度附近可以明显看到一个速度增强的过程,推断为融化层所在高度,粒子融化导致粒子下降速度增加;1 km以上最大下沉速度为15.8 m/s,最大上升速度为14.8 m/s,出现在云顶附近。单体2出现时间为18∶21~18∶47、维持约26 min,30 dBZ回波高度达8 km,1 km处融化加速过程明显,1 km以上最大下沉速度为15.4 m/s,最大上升速度为13.4 m/s。单体3出现在18∶47~19∶05,持续时间最短为18 min,30 dBZ回波高度达发展最高达9 km,最大下沉速度为18.1 m/s,最大上升速度为11.9 m/s。

图3 2014年7月4日17∶30~19∶15 C-FMCW雷达谱参数
3.2 快速生消弱对流
图4为2014年7月5日15∶30~16∶30探测到的连续三个小尺度弱对流泡体结构,在本站分别持续了16 min、9 min、12 min。此类降水云出现频数最多、且多发生在午后,发展高度多在6 km以下,持续时间较短,这种局地小尺度对流可能与地面热力状况变化有关。速度图中在1 km高度以下有明显加强,但地面并未观测到降水出现。

图4 2014年7月5日15∶30~16∶30 C-FMCW雷达谱参数
3.3 “云盖”结构
图5为2014年7月8日16∶00~17∶00是一次高空层云覆盖小尺度对流泡体的“云盖”结构。高层云云底高度约为8 km,云层厚度约3 km,持续约100 min,云内最强回波为16.3 dBZ,最弱回波为-5.44 dBZ,云内整体结构发展均匀,没有明显的上升或者下沉运动,具有层云结构特征,此时段无地面降水。下层泡体持续时间较短,约22 min,其中回波强度图中有短暂的扰动加强,最强回波强度为45.1 dBZ。速度图中,在1 km高度处也依稀可以看到一个粒子融化速度增强的过程。

图5 2014年7月8日 16∶00~17∶00 C-FMCW雷达谱参数
图6为与图5相对应的三个时刻的回波强度谱密度分布,图6a)中16∶26∶48的高层云在8km~11 km,速度分布在-1 m/s ~4 m/s范围内,谱宽较窄,云体结构稳定;底层云高6 km,速度分布在-4 m/s ~10 m/s,谱宽较宽,强回波区集中在2 km~4 km,地面有降水出现;图6b)16∶30∶01两层云体结构发生了“握手”,但各自对流运动并不强烈,低空2 km处融化过程明显,下降速度增大;图6c)16∶46∶58 低空对流消散,高空云体结构依然稳定持续。

图6 C-FMCW雷达回波强度谱密度
图7 给出2014年7月19日23∶00~20日00∶30一次高空云系“入侵”过程。图8为这次“入侵”过程相对应的6个时刻的回波强度谱密度分布。层云高6 km~11 km(谱分布如图8a),入侵云系于23∶39出现(如图8b),23∶48两层云结构相交(如图8i),从图8a)~j)可以看出,层云谱分布在6 km~11 km、0速度附近,结构稳定;图8b)~k)可以看出入侵云从13 km处坠下,下降速度不断增强;图8 l)00∶26∶17仍然可以看出是层云谱和“入侵”云谱的叠加,1.5 km处下降速度明显增大,是粒子融化所致,图7速度图上表现更为清晰。

图7 2014年7月19日23∶30~2014年7月20日00∶30C-FMCW雷达谱参数
4 结束语
(1)作为我国首次研制的C波段调频连续波体制天气雷达,本文主要介绍了C-FMCW雷达探测原理,给出了信号及数据处理原理和流程以及相关技术难点的克服方法。C-FMCW雷达采用2次FFT信号处理技术,使其具有很高的相参处理得益。第一次FFT采用调频连续波技术提取回波信号中的距离信息,第二次FFT采用相干谱分析方法获得各个距离上返回信号的功率密度谱分布,进一步提高系统的灵敏度,可以提供降水云体的精细垂直结构和回波强度谱分布数据。
(2)使用外接仪表对返回信号功率谱分布进行了标定,定标曲线拟合线斜率为1.004,均方根误差为0.19,系统的动态范围为98 dB,结果表明该雷达满足观测气象目标的精度要求。
(3)2014年7月和8月C-FMCW雷达在西藏那曲地区观测到的高原降水云探测数据,C-FMCW雷达高灵敏度、高时空分辨率,可以探测发展深厚的对流降水云,捕获快速演变的局地弱降水云,又能穿透雨区、给出多层云结构的真实描述。
[1] 斯科尔尼克 M I. 雷达手册[M]. 北京:国防工业出版社, 1978. SKOLNICK M I. Radar manual[M]. Beijing: National Defence Industry Press, 1978.
[2] RICHTER J H. High resolution tropospheric radar sounding[J]. Radio Science, 1969(4): 1261-1268.
[3] RICHTER J H, GOSSARD E E. Lower tropospheric structure as seen by a high-resolution radar[R]. [S.l.]: Naval Electronics Laboratory Center, 1970: 17-18.
[4] CHADWICK R B, MORAN K P, STRAUCH R G, et al. A new radar for measuring winds[J]. Bulletin of the American Meteorological Society,1976, 57(9): 1120-1125.
[5] GOSSARD E E, CHADWICK R B. Capability of surface-based clear-air Doppler radar for monitoring meteorological structure of elevated layers[J]. Journal of AppliedMeteorology Applmeteorology, 1984(23): 474-485.
[6] FRASIER S J, INCE T, LOPEZ-DEKKER F. Performance of S-band FMCW radar for boundary layer observation preprints.[C]// 15th Conference on Boundary Layer and Turbulence. Wageningen, Netherlands: American Meteorological Society, 2002: 382-385.
[7] INCE T, FRASIER S J, MUSCHINSKI A, et al. An S-band frequency-modulated continuous-wave boundary layer profiler: Description and initial results[J]. Radio Science, 2003,38(4): 1072.
[8] BENNETT L J, WECKWERTH T M, et al. Observations of the evolution of the nocturnal and convective boundary layers and the structure of open-celled convection on 14 June 2002[J]. Monthly Weather Review, 2010,138(7): 2589-2607.
[9] COAUTHORS D B. The dryline on 22 may 2002 during IHOP_2002: Convective-scale measurements at the profiling site[J]. Monthly Weather Review, 2006,134(1): 294-310.
[10] KOCH S E, FELZ W, FABRY F, et al. Turbulent mixing processes in atmospheric bores and solitary waves deduced from profiling systems and numerical simulation[J]. Monthly Weather Review, 2008,136(4): 1373-1400.
[11] GOSSARD E E, FRISCH A S. Relationship of the variances of temperature and velocity to atmospheric static stability-application to radar and acoustic sounding[J]. Journal of Climate and Applied Meteorology, 1987,26(8): 1021-1036.
[12] PETERS G, FISCHER B, ANDERSSON, T. Rain observations with a vertically looking micro rain radar (MRR). Boreal Environment Research, 2002,7(4): 353-362.
[13] WHITE A B, JORDAN J R, MARTNER B E, et al. Extending the dynamic range of an S-band radar for cloud and precipitation studies[J]. Journal of Atmospheric & Oceanic Technology, 2000,7(1): 53-62.
[14] 王宏哲. 用于机场场面目标监视的高分辨FMCW雷达技术[J]. 现代雷达, 2010, 32(7): 21-23. WANG Hongzhe. Techniques of high resolution FMCW radar for airport surface surveillance[J]. Modern Radar, 2010, 32(7): 21-23.
[15] 党宏社, 韩崇昭, 赵广社. 汽车毫米波FMCW雷达中频信号的采样与处理[J]. 现代雷达, 2002, 26(7): 4,43-45. DANG Hongshe,HAN Chongzhao, ZHAO Guangshe. Middle frequency signal sampling processing method of automobile millimeter wave FMCW radar[J]. Modern Radar, 2002, 26(7): 43-45.
[16] 钟刘军, 阮 征, 葛润生,等. 风廓线雷达回波信号强度定标方法研究[J]. 应用气象学报, 2010,21(5): 598-60. ZHONG Liujun, RUAN Zheng, GE Runsheng. Calibration method of echo intensity of wind profile radar[J]. Journal of Applied Meteorological Science, 2010.21(5): 598-60.
[17] 仲凌志, 刘黎平, 葛润生, 等. 毫米波测云雷达的系统定标和探测能力研究[J]. 气象学报, 2011,69(2): 352-362. ZHONG Lingzhi, LIU Liping,GE Runsheng. A study of the calibration of the new generation of millimeter-wavelength cloud radar(HMBQ) and its detection capability[J]. Acta Meteorologica Sinica, 2011,69(2): 352-362.
金 龙 男,1989年生,硕士研究生。研究方向为C-FMCW雷达探测系统数据处理分析。
阮 征 女,1964年生,研究员级高级工程师。研究方向为地基遥感系统及方法。
Application of FMCW Technology in Weather Radar and Cloud Detection over the Tibetan Plateau
JIN Long1,2,RUAN Zheng1,GE Runsheng1,WU Jun3,QI Rui3
(1. State Key Lab of Severe Weather Chinese Academy of Meteorological Science, Beijing 100081, China)(2. Meteorological Technical Equipment Center of Hebei Province, Shijiazhuang 050021, China)(3. Anhui Sun-create Electronic Co., Ltd. Hefei 230088, China)
Frequency modulated continuous wave (FMCW) technology for weather radar has the characteristics of the high precision ranging speed, small blind region, low the peak power, the system dynamic range, high sensitivity. At the same time it is a technical difficulty to calibrate the weak signal. In this paper it is given that the detection principle and the system structure of the C-band frequency modulated continuous wave radar (C-FMCW), the calibration of the weak signal and the way to overcome the difficulties of the calibration of the weak signal. Plateau observation experiments are carried out in Naqu Tibet July and August of 2014. Three kinds of typical examples plateau precipitation cloud observations are given and the structural features is revealed of the plateau precipitation cloud.
C band frequency modulation continuous wave radar; detection principle; radar quantitative calibration; clouds detection capability over the Tibetan Plateau
10.16592/ j.cnki.1004-7859.2016.03.002
国家自然科学基金资助项目(41475029);气象公益类行业资助项目(GYHY201306004;GYHY201306040)灾害天气国家重点实验室自主研究资助项目
阮征 Email:ruanz@camscma.cn
2015-10-24
2015-12-26
TN959.4
A
1004-7859(2016)03-0006-06
猜你喜欢
今日农业(2021年19期)2022-01-12 06:17:00
能源工程(2021年5期)2021-11-20 05:50:42
黑龙江气象(2021年2期)2021-11-05 07:07:00
空间科学学报(2020年1期)2021-01-14 00:53:20
家教世界(2018年16期)2018-06-20 02:22:00
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
成都信息工程大学学报(2016年6期)2016-06-01 12:10:06
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
中国光学(2015年5期)2015-12-09 09:00:46