
工业机器人综合训练平台
2016-12-20 06:29唐矫燕
实验室研究与探索 2016年2期
印 松, 唐矫燕
(上海电机学院 机械学院,上海 200245)
工业机器人综合训练平台
印 松, 唐矫燕
(上海电机学院 机械学院,上海 200245)
为了适应应用型人才培养的需要,开发了一套贴近工程实际的工业机器人综合训练平台。该平台硬件包括基于三菱PLC和触摸屏的控制板和FANUC机器人。控制板作为上层装置,提供人机交互界面,启动机器人运动程序并对机器人状态进行监控。机器人作为下层装置,执行指定的作业。控制板与机器人之间的通信提供并行IO和CCLINK总线两种可选方式。基于该平台,学生可以选用合适的机器人末端执行器,连接机器人与PLC的通信线路和气动回路,编写机器人和PLC程序,设计人机交互界面以完成机器人训练任务。经过多班次的实践表明,该平台能够充分调动学生参与的积极性,取得了良好的教学效果。
工业机器人; 综合训练; 可编程控制器; 人机交互界面
0 引 言
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的自动化装备。推进工业机器人的应用和发展,对于改善劳动条件,提高产品质量和劳动生产率,带动相关学科发展和技术创新能力提升,促进产业结构调整、发展方式转变和工业转型升级具有重要意义[1]。世界机器人联合会(IFR)认为中国是工业机器人市场增长最快的国家之一,数据表明,到2015年,我国将成为全球规模最大的机器人市场[2]。工业机器人的大量应用必然面临相关人才短缺的问题,包括机器人操作与维护类人才和机器人系统集成与应用类人才。
目前,国内高校所开设的机器人实践课程主要针对非工业用机器人,或仅着眼于工业机器人的认知及示教编程,缺少工业机器人工程应用相关实践课程及实践平台,远远满足不了社会对相关技术人才培养的需求[3-7]。为了紧跟工业机器人广泛应用的时代步伐,同时探索适合应用型人才培养的教学方法和手段,我校机械电子工程专业较早开设了“机器人学”和“工业机器人技术与应用”两门理论课和具有工程性、综合性和实践性特点的“工业机器人项目综合训练”实践课,并基于FANUC机器人和PLC控制板搭建了工业机器人综合训练平台[8]。基于该平台,学生可以综合利用所学得的相关理论知识,自己设计并动手完成指定的机器人训练任务,达到其工程实践能力锻炼和工程素养培养的目的。
1 总体方案
1.1 设计思路
搭建机器人综合训练平台是为了让学生了解和学习工业机器人系统集成与应用技术,通过完成一个完整的机器人应用项目,达到工程实践能力和工程素养培养的目的。为了提高训练的有效性,增强学生参与的积极性,课程从项目选定、平台搭建以及元器件的选择等方面来保证机器人综合训练更加接近于工程实际。基本设计思路是提供一个训练平台,学生可以在这之上自主设计、动手搭建一个可以控制机器人自动运行的应用系统,以便完成所设定的工件搬运任务。
1.2 平台组成
本课程所采用的机器人应用系统如图1所示。根据所给出的机器人训练任务,进行方案设计,采用Roboguide软件对任务进行仿真和离线编程,制定机器人与PLC通讯的IO分配表,选择合适的末端执行器,动手搭建对应的气动回路,连接机器人与PLC通信线路,编写机器人和PLC程序,设计触摸屏界面,完成机器人训练任务。

图1 机器人综合训练平台组成
2 训练平台的实现
机器人训练平台实物如图2所示。该平台包括一台FANUC机器人;一套包含威纶触摸屏和三菱FX3GA系列PLC的控制台;一套气动末端执行器等。PLC控制台提供人机交互接口,控制机器人自动运行完成工件搬运作业,并对实时状态进行监控。

图2 机器人训练平台
2.1 FANUC机器人
FANUC机器人是工件搬运作业的主体,可通过示教的方式完成机器人编程。所编写的机器人程序可在示教器上启动运行,然而工程应用中,往往希望机器人能够在满足某些条件的情况下,通过外部控制实现自动运行。FANUC机器人自动运行有RSR和PNS两种方式,其中多采用PNS方式。采用PNS方式时,其程序命名规则和调用时序如图3、4所示。其中CMDENBL,SNO1-8,SNACK,PROGRUN为机器人系统输出信号(UO),PNS1-8,PNSTROBE, PROD_START为系统输入信号(UI)[9]。
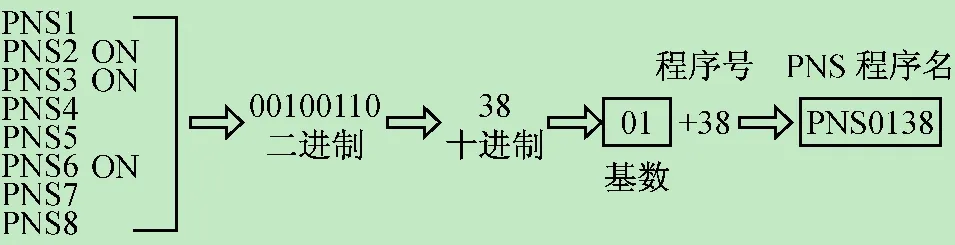
图3 PNS程序命名规则

图4 PNS程序调用时序
2.2 PLC
训练平台所采用的三菱FX3GA-24MR PLC带有14个输入口和10个输出口,输出方式为继电器输出。当PLC的S/S端口连接0 V或24 V时,可方便实现源型输入或漏型输入[10]。
2.3 信息交互
机器人需通过IO口与外围设备通讯。机器人综合训练采用并行IO和CC-LINK总线两种通讯方式。
(1) 并行IO。并行IO采用点对点的通讯方式,一个机器人IO对应一个PLC输入输出端口,定义清晰,易于理解,但线路连接复杂,不适合于多机通讯,在工业现场,尤其是需远距离通讯的场合难于实现。图5为采用CRMA15/16主板时,机器人与外围设备输入输出信号连接[11]。由此可见,当机器人的输出接入PLC时,PLC端应采用漏型输入的接线方式。
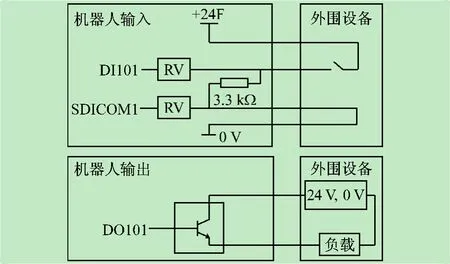
图5 机器人与外围设备信号连接
(2) CC-LINK总线。CC-LINK总线是以三菱电机为主导的多家公司以“多厂家设备环境、高性能、省配线”为理念开发的现场总线,该总线网络可由1个主站和64个从站组成,子站可以是远程IO站、远程设备站或智能设备站。主站和从站之间通过普通屏蔽双绞线连接,其信号传输速率可达10 MB/s,通信距离可达1 200 m[12,13]。CC-LINK总线相比并行IO,线路连接简单,但需较为复杂的参数配置,其电气连接如图6所示[14]。在设置CC-LINK远程参数时,应将FANUC机器人设置为远程设备站,且站点数至少设置为2[15]。在完成CC-LINK设置后,通过PLC指令FROM K0 H0E0 K4M100 K2和TO K0 H160 K4M300 K2 两条指令,即可完成如图7所示通信映射关系,实现了通过PLC辅助继电器实现对机器人UI/UO和DI/DO的读写。

图6 CC-LINK电气连接

图7 PLC与机器人寄存器映射关系
(3) 信号配置。机器人的信号配置就是建立软件端口与硬件端口之间的关系。FANUC机器人通过示教盒配置的画面如图8所示。其中RANGE为软件端口的范围,RACK为机架号,代表I/O通信设备种类,采用CRMA15/16方式通讯时设置为48,采用CC-LINK方式时设置为92,SLOT为I/O模块的序号,START为对应于软件端口的硬件端口起始编号。通过图8中的设置,机器人的系统输入(UI[1-18])与起始编号为1的18个硬件输入端口,以及系统输出(UO[1-20])与起始编号为1的20个硬件输出端口联系了起来。

图8 机器人信号配置
2.4 末端执行器
机器人综合训练采用的末端执行器包括夹钳式和气吸式两种。学生需根据工件的特点选用合适的末端执行器,并搭建合适的气动回路。
3 机器人实践
以学生完成机器人搬运作业为例。学生首先对任务进行分析,根据所需搬运工件的特点,选用气吸式末端执行器,并设计出如图9所示的气动回路,然后根据所需资源定义,如表1所示PLC和机器人的I/O分配表。依据I/O分配表和机器人接口定义,画出图10所示电气原理图,并在此基础之上完成图2所示电气连接。通过编写机器人和PLC程序,操作所设计的触摸屏界面即可实现机器人自动搬运作业。
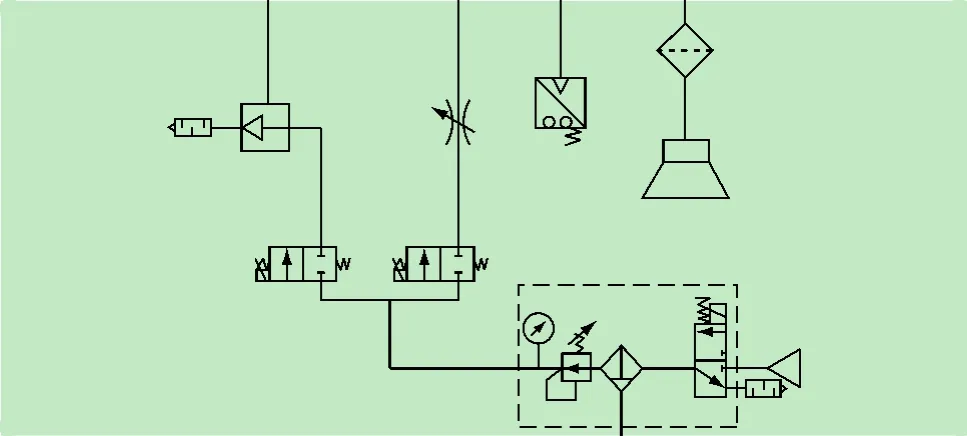
图9 气吸式末端执行器气动回路原理图
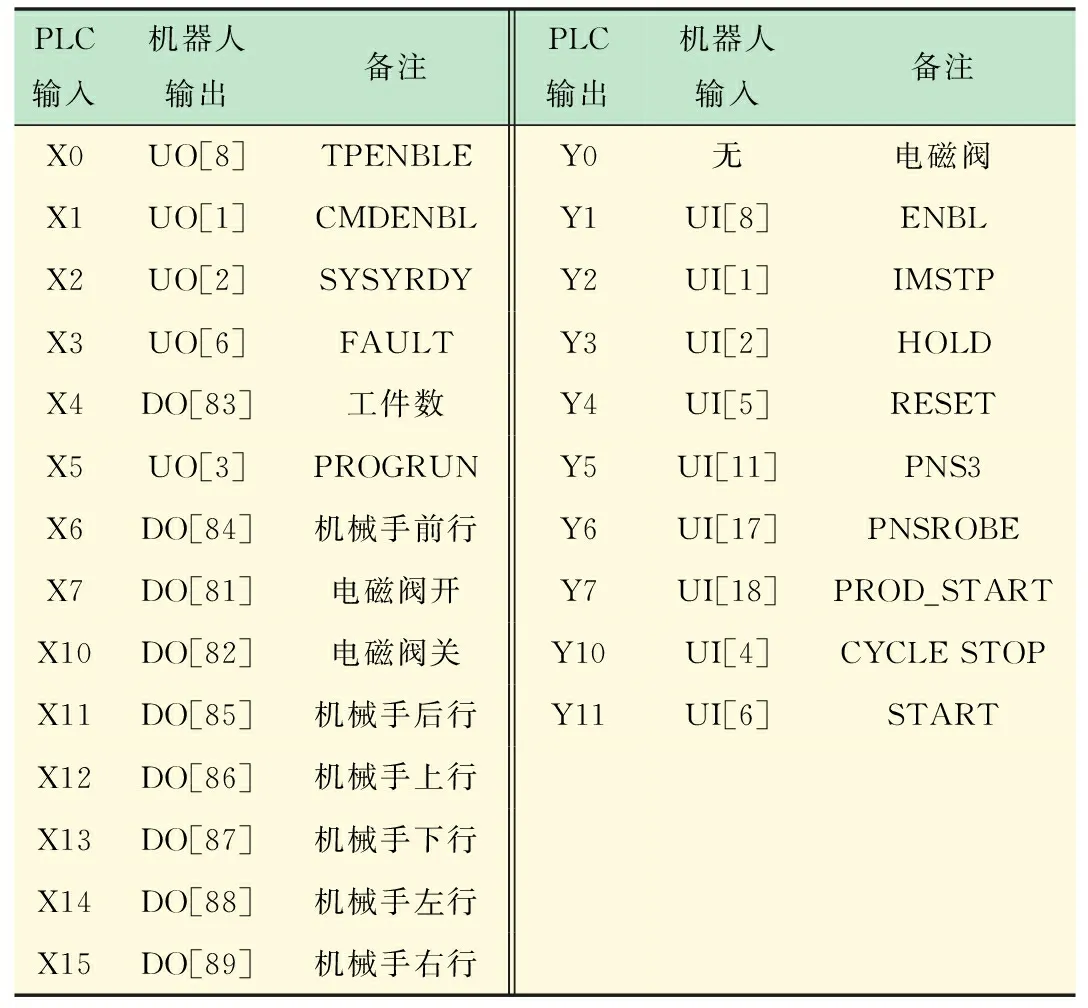
表1 PLC和机器人I/O分配表

图10 电气原理图
4 结 语
基于FANUC机器人和PLC控制台所开发的工业机器人综合训练平台贴近工程实际,既是学生自己设计、动手操作的平台,同时也是一个多门理论知识深入学习的平台。由于在机器人训练中,学生参与了任务的整个实施过程,开动脑筋,动手操作,互相协作,因此表现出极大的兴趣,也取得了不小的成绩。
[1] 中华人民共和国工业和信息化部. 工业和信息化部关于推进工业机器人产业发展的指导意见[EB/OL]. (2013-12-30). http://www.miit.gov.cn/n11293472/n11293832/n11293907/n12246780/15813180.html.
[2] 骆敏舟, 方 健, 赵江海. 工业机器人的技术发展及其应用[J]. 机械制造与自动化, 2015, 44(1):1-4.
[3] 张 佳, 陈 杰, 窦丽华. 基于路径规划的智能机器人控制实验[J]. 实验技术与管理, 2010, 27(12): 44-47.
[4] 于 莉. 机器人实验室建设的探讨[J]. 高校实验室工作研究, 2010(3): 103-105.
[5] 方 峻, 王晓斌, 张 翔. 依托机器人比赛平台指导毕业设计的研究与实践[J]. 实验技术与管理, 2014, 31(5): 28-31.
[6] 赵玉侠, 狄杰建, 高德文, 等. MOTOMAN工业机器人在焊接条件下的示教编程与实验研究[J]. 实验室研究与探索, 2010, 29(9): 59-63.
[7] 刘吉轩. 六自由度机器人综合创新实验[J]. 实验技术与管理, 2010, 27(12): 36-39.
[8] 李庆龄. 应用型本科工业机器人课程教学改革的探索与实践[J]. 中国教育技术装备, 2013(21): 93-95.
[9] 肖明耀, 程 莉. 工业机器人程序控制技能实训[M]. 北京:中国电力出版社, 2010: 72-83.
[10] 三菱电机. FX3GA系列微型可编程控制器用户手册(硬件篇)[M]. 上海: 三菱电机自动化, 2009: 125-130.
[11] FANUC Corporation. R-30iA Mate controller maintenance manual[M]. Yamanashi: FANUC Corporation, 2010: 147-150.
[12] 覃 强, 刘长发. 开放式现场总线CC-Link综述[J]. 仪器仪表标准化与计量, 2003(1): 11-13.
[13] 剪 欣, 程良伦. CC-LINK总线技术在管桩生产中的应用[J]. 机床与液压, 2013, 41(14): 94-97.
[14] Mitsubishi Electric Corporation. FX3U-16CCL-M user’s manual[M]. Tokyo: Mitsubishi Electric Corporation, 2012: 11.
[15] FANUC Corporation. CC-Link interface (Slave) operator’s manual[M]. Yamanashi: FANUC Corporation, 2009: 3-10.
Industrial Robot Platform for Comprehensive Training
YINSong,TANGJiao-yan
(College of Mechanical Engineering, Shanghai Dianji University, Shanghai 200245, China)
To meet the needs of cultivating application oriented talents, an engineering practice oriented industrial robot platform for comprehensive training was developed. This platform consisted of a MITSUBISHI PLC and touch screen based control board and a FANUC robot. Acting as the top level device, control board provided human machine interface, called the robot motion program and monitored the robot status. Robot was the lower level device and executed the designated task. Selectable communication methods of parallel IO and CCLINK bus between control board and robot were provided. By using this platform, college students can choose appropriate robot end effectors, connect the communication lines between the robot and PLC, construct the pneumatic circuit, program the robot and PLC, and design the human-machine interactive interface to accomplish the training tasks. By practicing in different classes, this platform can attract students joining in this training, and works well in teaching.
industrial robots; comprehensive training; PLC; human machine interface
2015-04-02
上海市教委科研创新项目(14AZ07);上海电机学院重点课程建设项目
印 松(1979-),男,四川宣汉人,讲师,现主要从事机器人技术及应用研究。Tel.:18001638690;E-mail:yins@sdju.edu.cn
TP 241.2
A
1006-7167(2016)02-0055-04
猜你喜欢
科学家(2021年24期)2021-04-25
测控技术(2018年6期)2018-11-25
测控技术(2018年12期)2018-11-25
测控技术(2018年8期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
网络安全和信息化(2017年6期)2017-11-23
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
电子设计工程(2015年12期)2015-02-27
电子设计工程(2015年8期)2015-02-27
