
大面阵CCD相机瑕点像元快速修复
2016-12-20 05:16:46李开端李英杰王尚强
设备管理与维修 2016年11期
李开端,李英杰,王尚强
(海军航空工程学院青岛校区,山东青岛266041)
大面阵CCD相机瑕点像元快速修复
李开端,李英杰,王尚强
(海军航空工程学院青岛校区,山东青岛266041)
大面阵CCD相机中瑕点像元的存在,降低了图像的输出品质,对目标识别造成不利影响。根据瑕点邻域灰度变化特点,将一副图像中需要修复的瑕点区域,采用自适应邻域权值的修复算法,对处于边界区域的瑕点修复质量明显提高。
瑕点;边缘检测;曲线拟合;图像修复
0 引言
光电图像传感器对目标光束的线性响应是确保成像质量的关键,在大面阵尤其是超大面阵CCD中,存在部分像元对目标光的响应并不能真实反映目标真实亮度的情况。一类是像元的输出不随输入改变,在影像中总是呈现某一固定灰度值的盲点像元;另一类是像元输出虽然变化,但不随入射光强线性改变的病态像元,这两类像元统称为瑕点像元。CCD面积越大,出现瑕点的概率就越高,这不仅会改变目标影像的真实色彩、纹理和结构形状,甚至会改变目标的属性,影响目标识别。因此,对于大面阵CCD图像中瑕点像元的修复,是提高图像整体效果的重要内容。
由于光学成像系统输出的真实影像是由弥散圆斑组成的灰度图像,在目标影像的边缘和纹理边界部分不存在理想的阶跃型灰度突变,而是一个缓变的过程,按照灰度梯度的变化可以将图像分为变化剧烈、平缓和无变化3种情形[2,6],对应着图像中的目标边缘(界)、灰度渐变和灰度平坦3种区域。不同区域的瑕点,无论是孤立的、还是面(线)状瑕点,在利用邻域修复时,必须针对瑕点所处区域灰度变化特征,采用不同的处理方式。文献[3]采用了模板大小变化的自适应修复,文献[4]采用了根据局部纹理变化动态确定样板集大小的快速修复算法,文献[5]提出了采用破损区域分块的图像修复方法,提高了图像的修复精度和效率,也取得了较好的视觉效果。在借鉴现有修复方法优点基础上,提出一种针对瑕点区域特征的邻域权值自适应修复算法,在保证修复效率的同时,提高了修复后图像的真实性。
1 图像分割
图像区域的分割是以图像中灰度梯度变化为依据,将空间图像分割为边缘(界)、渐变和平坦等3个区域。由于图像中存在多种噪声和复杂的背景,采用具有多分辨率特征的小波对图像进行边缘(界)检测,不仅运算速度快、还能较好的抑制噪声。

在2j尺度下,2个方向的二维小波可以表示为式(2)。

图像的二维小波变换包含2部分,见(3)式。

梯度矢量模值和方向分别为式(4)。

设2个梯度阈值T1,T2,M2jf(x,y)≥T1,确定为边缘(界);T2≤M2jf(x,y)<T1,确定为灰度渐变区;M2jf(x,y)<T2,确定为灰度平坦区。
2 瑕点灰度值修复
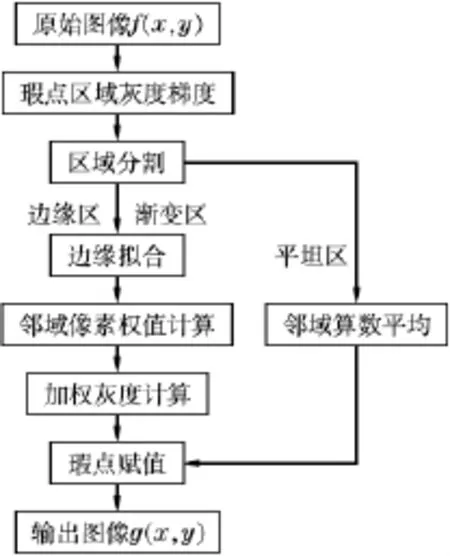
图1 瑕点修复流程
如果瑕点邻域存在边缘(界),必须先判断边缘是否通过瑕点,以决定修复时邻域像素权值,修复流程见图1。对于已经确定的边缘,在瑕点前后取位于边缘上n个点(xi,y)i(i=0,1,2,Λ,n-1)作为观察点。设曲线Φ(x)= a0Φ0(x)+a1Φ1(x)+Λ+an-1Φn-(1x)为观察点拟合后的曲线,其中Φ(kx)=bxk,k=0,1,2,Λ,n-1,其阶数与图像类型有关。
为了使拟合后的曲线尽可能的涵盖所有的点,要求偏差的平方和最小,即式(5)。


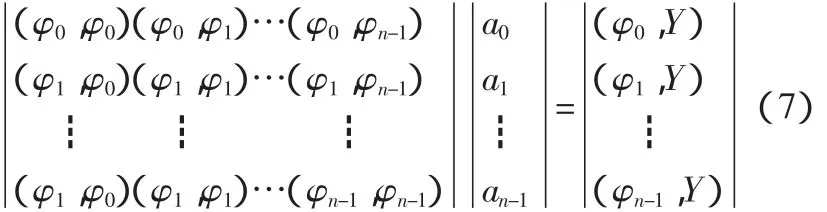
当Φ0(x),Φ1(x),Λ,Φn-1(x)线性无关时,方程存在唯一解aj,并以瑕点到拟合曲线的距离作为判断瑕点是否在边缘的依据。
当瑕点到拟合曲线的实际距离d大于设定的距离阈值Δd,认为瑕点处在无灰度剧烈变化的平坦区,邻域中不同方向像素对瑕点实际灰度的影响相同。因此,采用4邻域固定邻域权值矩阵计算瑕点灰度,不仅速度快,而且也不影响视觉效果。如果瑕点到拟合曲线的距离d小于设定的距离阈值Δd,瑕点邻域存在边缘(界)。此时,瑕点邻域不同方向上的像素对瑕点影响不同,若采用固定邻域权值修复,虽能保证修复速度,但效果较差。为此,根据瑕点周边图像灰度变化特性,采用反应邻域灰度变化情况的自适应邻域权重矩阵计算方法,对瑕点进行修复。即式(8)。

3 实验结果
大面阵CCD相机中无论是孤立的瑕点,还是线状或面状瑕点区,都属于极微小破损区域,图2a是原始航空照片局部放大图像;图2b是增加破损瑕点和瑕线后的图像,其中,瑕线2和三组瑕点是由盲点形成的瑕点(线),瑕线1是由病态像元形成的图像;图2c是按照传统加权平均法修复后的图像,从视觉效果看,三组瑕点修复较为理想,没有留下修复痕迹。而瑕线1的上部和瑕线2的中下部,由于处于图像灰度变化较为剧烈的目标边缘,还保留部分瑕线痕迹;图2d是采用本文方法修复后的影像,三组瑕点的修复效果和传统方法没有明显差别,而瑕线部分则有明显的好转。
采用峰值信噪比(PSNR)作为客观评价图像质量的标准,采用公式(9),计算结果见表1。
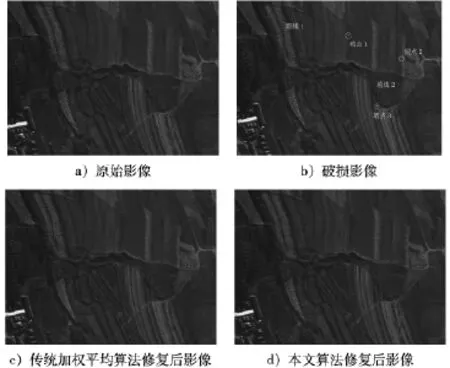
图2 相关图像
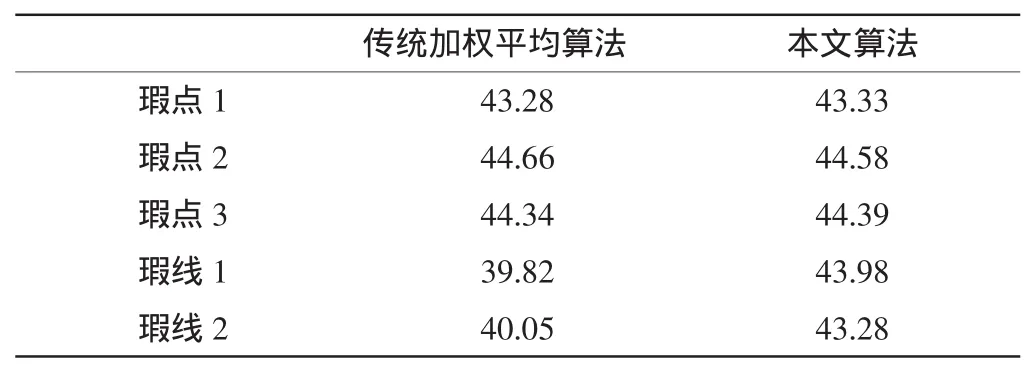
表1 峰值信噪比
式中f(i,j),f′(i,j)分别为原始图像和修复后图像相应像素的灰度值。
4 结论
通过对瑕点分区域的自适应领域权值的修复算法,较好的改善了边界区域瑕点的修复质量,相对于传统的加权平均修复方法,不仅有效缩短图像的修复时间,在效率和质量方面做到了很好的平衡。实验证明,在不破坏图像原有信息条件下,取得了较好的效果。
[1]韩军,刘钧.工程光学[M].西安:西安电子科技大学出版社,2007:317-326.
[2]龚声蓉,刘纯平,王强.数字图像处理与分析[M].北京:清华大学出版社,2006:210-235.
[3]翟海东,肖杰,鱼江,等.基于自适应模板的图像修复算法[J].计算机应用,2013,33(10):2891-2894.
[4]张睛,林家俊.纹理分布分析的快速图像修复算法[J].中国图像图形学报,2012,17(1):123-129.
[5]蒋建,李芳菊.一种新的基于破损区域分块划分的图像修复算法[J].科学技术与工程,2014,14(25):242-246.
[6]张涛,洪文学.基于自适应字典选择的MCA图像修复方法[J].光学技术,2010,36(5):672-676.
〔编辑 凌瑞〕
TP212
B
10.16621/j.cnki.issn1001-0599.2016.11.53
猜你喜欢
昆钢科技(2022年4期)2022-12-30 11:24:02
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
贵州大学学报(艺术版)(2019年3期)2019-09-10 07:22:44
小资CHIC!ELEGANCE(2018年30期)2018-09-17 03:25:40
自动化学报(2018年7期)2018-08-20 02:59:04
小资CHIC!ELEGANCE(2017年27期)2017-10-11 14:51:09
自动化学报(2017年7期)2017-04-18 13:41:02
