
大型天文望远镜方位轴电机转子位置检测
2016-12-20 07:03宋晓莉汪达兴
微特电机 2016年7期
宋晓莉,汪达兴,张 超
(1.中国科学院 国家天文台南京天文光学技术研究所,南京 210042;2.中国科学院 天文光学技术重点实验室,南京 210042)
大型天文望远镜方位轴电机转子位置检测
宋晓莉1,2,汪达兴1,2,张 超1,2
(1.中国科学院 国家天文台南京天文光学技术研究所,南京 210042;2.中国科学院 天文光学技术重点实验室,南京 210042)
大型天文望远镜实时跟踪目标星体,方位轴电机位置检测是其重要一环。针对其复杂机械结构及精密光学装置的特点,采用拼接弧线永磁同步电动机对大型望远镜方位轴进行直接驱动,采用带距离编码的光电编码器检测拼接弧线永磁同步电动机转子位置,设计了编码器处理电路,采用长线接收/驱动器对编码器信号进行处理,然后根据带距离编码的编码器特点实时计算方位轴电机转子位置。实验表明对超低速运行的大型天文望远镜,高精度的光电编码器可以根据转子的磁极对数选择相应的参考点数应用到拼接式弧线电机进行电机转子磁极位置检测,简化转子位置计算,节约控制的计算速度。可达到快速、准确、简单检测方位轴转子磁极位置的目的。
编码器;拼接弧线电机;望远镜;位置检测
0 引 言
世界上越来越多的大型天文望远镜都开始采用直接驱动技术去驱动机架,以简化结构,提高跟踪精度。VLT望远镜采用直接驱动的方式对分段式气隙无刷直流永磁同步电动机进行控制[1],采用霍尔传感器来检测转子初始位置作为启动,结合20位的光电编码器来检测望远镜位置。我国天文学家提出的中国30 m未来极大口径天文望远镜(CFGT)也计划采用直接驱动方式。常规的伺服电机伺服控制系统位置检测要求不高,在文献[2-5]中都应用了高频信号注入法对感应电机或永磁同步电动机在低速或零速运行时进行控制取得了很好的效果。
对于高速运行的电机,其反电势相对较大,转子位置检测相对容易实现[6-7],但针对天文望远镜来说,采用直接驱动方式跟踪目标天体时,其要求转速很低,并且要求望远镜机架驱动电机运行时达到低速1(″)/s(4.8×10-6rad/s),高速2(°)/s(0.174 rad/s),并且无爬行现象,因而对这种极低速运行的电机,显然反电势很低无法实现准确测出转子的位置。本文提出一种大型天文望远镜直接驱动伺服电机转子位置检测方法,采用海德汉的带距离编码的高精度增量式编码器直径为4 m的精密拼接弧线电机检测位置,并采取相应的处理措施,保证实现高精度的位置检测,为电流环和速度环提供了必要的位置计算信息,实验结果表明该方法可以达到系统要求目标。
1 拼接弧线电机位置检测
1.1 永磁同步电动机位置检测必要性
永磁同步电动机控制的核心技术是矢量控制,矢量控制系统在低速段转矩很大,能实现带载快速启动;由于存在电流环,因此具有电流(力矩)控制功能,从而控制电动机的转速,响应很快,为得到高性能的转矩、速度控制,转子空间位置反馈装置是必须的。永磁同步电动机进行矢量控制时,实现电枢磁场和转子磁场的的相互作用,保证永磁同步电动机工作在同步状态,转子位置的检测是其重要一环,这样才能保证功率管的通电模式、电枢的电流和反电势工作在同相状态。对永磁同步电动机来说,转子位置的测量是其实现闭环工作的前提[8-9],而对望远镜工作直接驱动系统来说,转子位置的检测也可以直接作用到位置环,这对高精度低速运行的大型天文望远镜跟踪系统来说,也是实现接近零速跟踪的必要条件。
本实验平台是4 m拼接弧线永磁同步电动机,图1 是望远镜方位轴驱动系统所用的拼接弧线电机,技术上可参考永磁同步电动机并改进以满足天文望远镜的需求,位置检测和计算也是实现驱动和跟踪的必要条件,本实验主要针对位置检测和计算开展工作,其它不再详述。
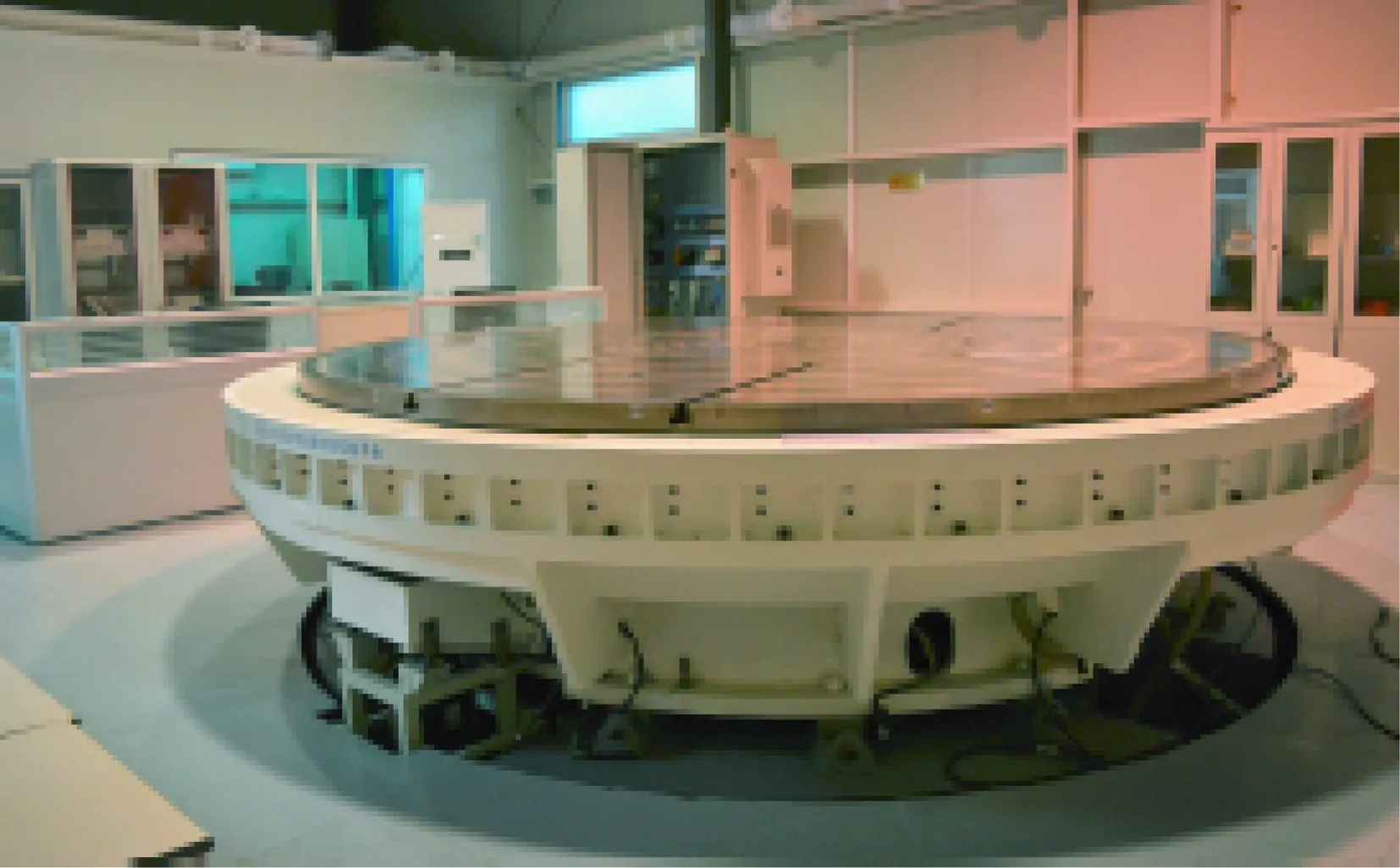
图1 方位轴拼接电机实物图
1.2 编码器信号处理
大型天文望远镜方位轴的驱动电机采用与望远镜机架高度集成在一起的机电一体化结构,除了与机架同轴安装的拼接式弧线永磁同步电动机外,它又是承重望远镜本体的载体。零件重量重、体积大,加工安装精度要求高,轴承和支撑结构复杂,精密调试相对困难,要求高精度编码器“同轴”安装在拼接式弧线永磁同步电动机的轴线上。由于加工和装配体积的限制,液压支撑系统的扰动,安装编码器的轴承精度,较难保证编码器的读数信号在全测量范围获得满意的信号输出,不可避免地引起输出波形的畸变,同时还附加有安装和被测轴轴承误差所导致的附加误差,从而引起计数错误,影响系统精度和定位精度[10]。通过编码器细分放大作用,从而导致编码器细分后引起计数误差,这种误差不仅影响大型天文望远镜的跟踪精度和定位精度,由于所采集的机械位置也是驱动电机的电磁位置,特别是望远镜在超低速运行时,也直接影响电机的矢量控制计算结果。因此较其他望远镜控制系统而言,采用拼接式弧线电机驱动的大型天文望远镜位置检测具有更加重要的作用。尤其是对高精度的带距离编码的光电编码器来说,对其参考点的影响严重影响机械位置的计算,从而使拼接弧线电机的电流环、速度环无法实现闭环运行。根据大型天文望远镜驱动跟踪的特点,采用硬件的方式对编码器信号处理,采用MC3486和MC3487设计了编码器的驱动和接收电路,从源头上滤除编码器信号的干扰,硬件处理框图如图2(a)所示。在不加处理时,编码器输出信号如图2(b)所示,采取处理措施后编码器零点信号如图2(c)所示。自然状态输出的编码器AB信号尚能计数,对带距离编码的高精度编码器来说,每个参考点都是对当前一段时间内位置信息的校正,可避免累计误差,这对超低速运行的大型天文望远镜来说是保证其精确跟踪的必要条件,此时的干扰信号会误认为是参考点的到来,无法实时校正当前累计误差。

(a)编码器处理硬件实现框图

(b)自然状态下ABZ信号(c)处理后的Z信号
图2 编码器信号处理
2 大型天文望远镜方位轴位置检测
2.1 位置计算实验
为保证可靠的位置信息,以实现快速、高精度的跟踪天体目标,电机的轴上安装了带距离编码的海德汉的增量式光栅位置编码器,这类编码器主要是指精度高于± 5"和线数高于10 000的编码器。
TI公司的2000系列DSP由于含有QEP及CAP等接口而被广泛应用。本系统充分结合二者的特点,采用TMS320F28xx和细分技术实现望远镜拼接弧线电机转子位置和望远镜位置检测。细分输出差分信号,由于传输距离较远并使信号能够直接在DSP的QEP和CAP端口处理,设计长线驱动电路并通过光耦隔离送到DSP的专用端口处理编码器信号。图3是方位轴拼接弧线电机位置处理框图。

图3 拼接弧线电机位置处理框图
由于本课题使用的电机转子直径较大,望远镜跟踪目标时速度超低,因此位置检测的精度直接影响到速度环和电流环,位置计算是其重要的环节,由于选用的是带距离编码的海德汉的ERA整圆编码器,共52 000线,52个参考点数,并进行4 096细分,理论上可获得0.006"的分辨率,这对直接驱动的大型天文望远镜来说,理论上的位置精度是实现跟踪的必要条件,距离编码示意如图4所示。
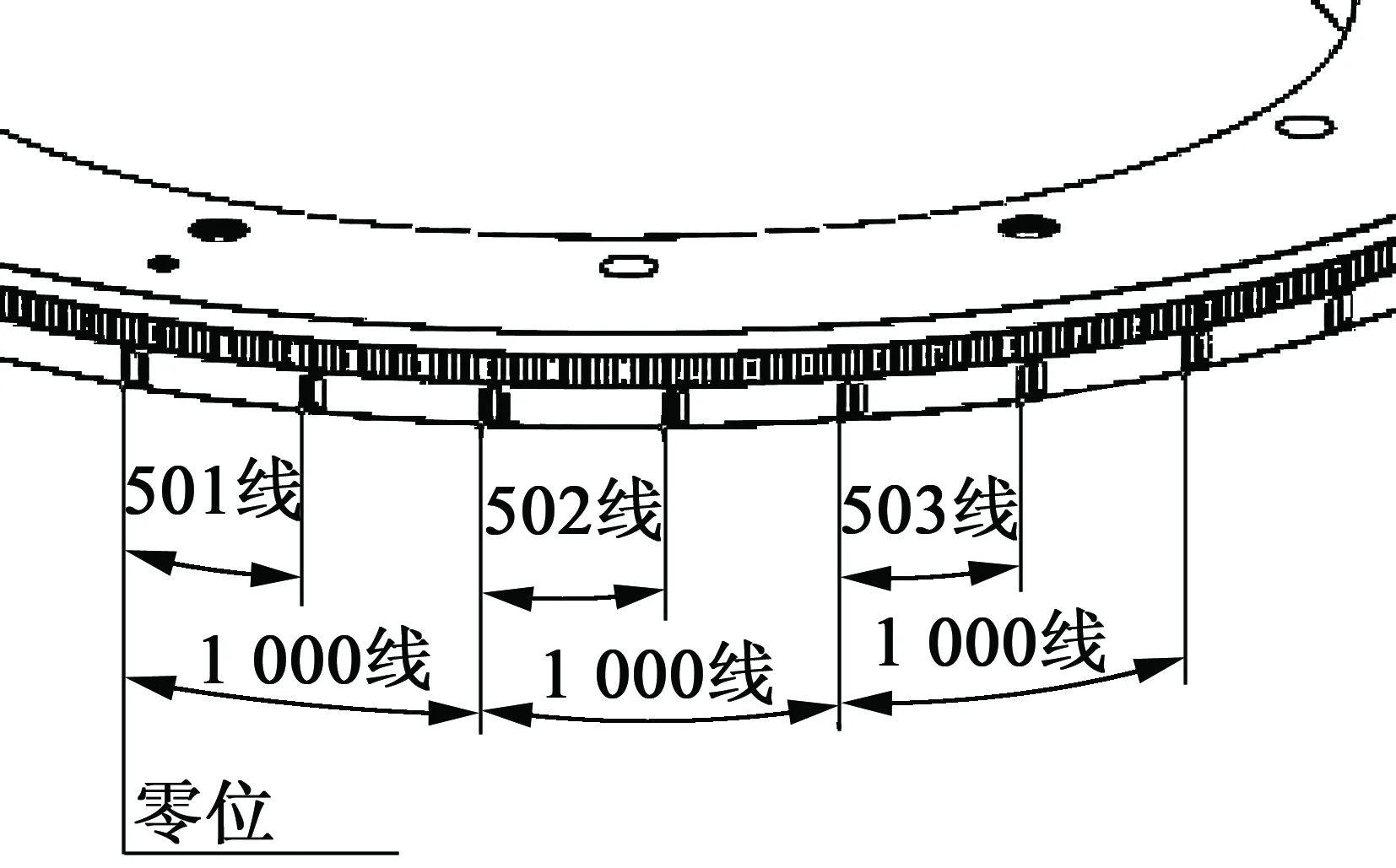
图4 距离编码示意图
根据图4示情况可以计算出每个脉冲距离零位的脉冲个数,从而计算出电机的实际位置,目前初步打算用开环启动,等经过计算后再闭环运行,从而实现系统运行。第一个移过参考点的相对零点的位置:
(1)

根据以上公式可给出系统当前参考点相对零点位置流程,如图5所示,控制器根据当前计数器的值

图5 参考点相对零点位置计算流程
和当前参考点的位置就可以实时计算出电机当前走过的位置:
(2)
2.2 测量结果
根据以上讨论的方法,为了验证本文所提方法的实用性,本文设计了拼接弧线电机驱动控制系统相应的软硬件电路,并且在拼接弧线电机上进行位置检测,实现位置环和速度环,本系统采用Id=0矢量控制策略,采用上述方法对方位轴电机转子位置检测并进行相应的控制,电机的转子位置测量如图6所示,电机实际运行速度如图7所示,基本满足大型天文望远镜方位轴跟踪的需求。

图6 方位轴电机转子实际位置

图7 方位轴电机转子位置检测下的速度运行
3 结 语
本文根据大型天文望远镜复杂的机械结构和精密光学系统,采用拼接弧线电机驱动大型天文望远镜方位轴,讨论了方位轴电机位置计算的必要性,提出采用带距离编码的高精度编码器对方位轴位置检测,研究了编码器干扰信号的处理,给出了带距离编码的编码器检测方位轴位置的方法,并在4m拼接弧线电机上进行了实验。实验结果证明:采用带距离编码的编码器对大型天文望远镜方位轴电机转子位置检测,可实现3.6(")/s速度,基本满足大型天文望远镜跟踪目标的要求。
[1]VENTURINIM,VISMARAA.Designandtestofverylargediameter,brushlesspermanentmagnettorquemotorsfortheverylargetelescope[C]//PowerSystemsWorld'96,1996,LasVegas,USA
[2] KIM S Y,HA I J.A new observer design method for HF signal injection sensorless control of IPMSMs[J].IEEE Transactions on Industrial Electronics,2008,55(6):2525-2529.
[3] CARAUANA C,ASHER G M,SUMMER M.Sumner,performance of HF signal injection techniques for zero-low-frequency vector control of induction machines under sensorless conditions[J].IEEE Transactions on Industrial Electronics,2006,53(1):225-238.
[4] PIIPPO A,HINKKANEN M,LUOMI J.Adaptation of motor parameters in sensorless PMSM drives[C]//International Conference on Power Electronics and Drive Systems,2007,1(4):406-413.
[5] AGARLITA S C.High frequency injection assisted"active-flux"-based sensorless vector controlof reluctance synchronous motors with experiments from zerospeed[J].IEEE Transactions on Industry Applications,2012,48(6):1931-1939.
[6] FU W N,HO S L,ZHANG Z.Design of position detection strategy of sensorless permanent magnet motors at standstill using transient finite-element analysis[J].IEEE Transactions on Magnetics,2009,45(10):4668-4671.
[7] 张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的告诉永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1889-1896.
[8] 李世良,刘景林,吴增艳,等.一种永磁同步电机转子初始位置检测方法[J].微电机,2015,48(3):24-28.
[9] 黄立培.电动机控制[M].北京:清华大学出版社,2003.
[10] 王显军.光电轴角编码器细分信号误差及精度分析[J].光学 精密工程,2012,20(2):379-386.
Rotor Position Detection of the Motor for Large Astronomical Telescope Azimuth Axis
SONGXiao-li1,2,WANGDa-xing1,2,ZHANGChao1,2
(1.Nanjing Institute of Astronomical Optics & Technology,National Astronomical Observatories,CAS,Nanjing 210042,China;2.Key Laboratory of Astronomical Optics & Technology,Nanjing Institute of Astronomical Optics& Technology,CAS,Nanjing 210042,China)
The detection of azimuth axis motor's rotor position is very important to track the target object for the large astronomical telescope. According to the characteristic of the complex mechanical structure and precision optical device of the telescope, the direct drive through segmented arc permanent magnet synchronous motor is adopted to drive the large astronomical telescope; the rotor position of the segmented arc permanent magnet synchronous motor was measured by the photoelectric encoder with distance encoding. First, the processing circuit of encoder was designed, then the signals mining with long term receiver/driver was deal t and the real-time rotor position were calculated based on the features of the encoder. Experiments show that the high precision photoelectric encoder can be applied to the rotor position of the segmented motor and achieve ultra-low speed of the large astronomical telescope. The encoder can be selected to fit the pole pairs of the segmented arc motor. It can simplify the process of calculation and achieve faster, more accurate and easier to detect the rotor position for large astronomical telescope.
encoder; segmented arc motor; telescope; position detection
2015-09-24
国家自然科学基金项目(11303065)
TM341;TM351
A
1004-7018(2016)07-0048-03
宋晓莉(1978-),女,博士,工程师,主要研究方向为大型天文望远镜直接驱动控制技术。
猜你喜欢
疯狂英语·新读写(2022年1期)2022-11-23
幼儿园(2021年12期)2021-11-06
辽宁丝绸(2021年3期)2021-09-11
小学阅读指南·低年级版(2021年5期)2021-05-28
制造技术与机床(2019年12期)2020-01-06
电子制作(2018年12期)2018-08-01
广东第二课堂·小学(2017年2期)2017-02-20
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
