
基于模糊控制的自动灌溉系统的仿真和应用*
2016-12-20 11:02车守全卢剑锋李宜汀杨肖委
现代机械 2016年6期
车守全,卢剑锋,李宜汀,杨肖委
(贵州大学,贵州贵阳550025)
基于模糊控制的自动灌溉系统的仿真和应用*
车守全,卢剑锋,李宜汀,杨肖委
(贵州大学,贵州贵阳550025)
设计了一种基于模糊控制和电磁比例阀的自动灌溉系统,并进行了MATLAB仿真。该自动灌溉系统由传感器、信号传输—接收装置、控制单元和执行元件组成。根据设定的所需土壤湿度,采集各传感器信号,用PLC做模糊控制运算,输出控制信号到执行元件,控制电磁阀的开度,从而控制喷灌流量的大小。该方法设计了模糊控制输入模拟量和阀开度的隶属度函数,仿真结果显示满足预期的控制要求。最后,对系统的实际应用作了相关设计。
模糊控制 MATLAB仿真 自动灌溉 PLC
0 引言
随着现代农业的发展,大棚种植以及大面积集中种植已经在很多地方应用,在传统的灌溉系统中,工作效率低下的手动灌溉系统已经完全不能满足现代农业的要求,即便是半自动化的灌溉,灌溉量也是人为判断,不同的操作人员,灌溉效果差别很大,没有很直接的参考意义。这也就要求配套的灌溉系统既能够取代传统农业的手动或者半自动化工作方式,同时工作过程也要高效、节能、节水[1-2]。
本文提出的自动灌溉系统,通过采集传感器数据,作模糊控制运算,最后输出运算结果,控制电磁阀开度,提高了自动控制过程的效率、精度和稳定性。
1 模糊控制自动灌溉系统
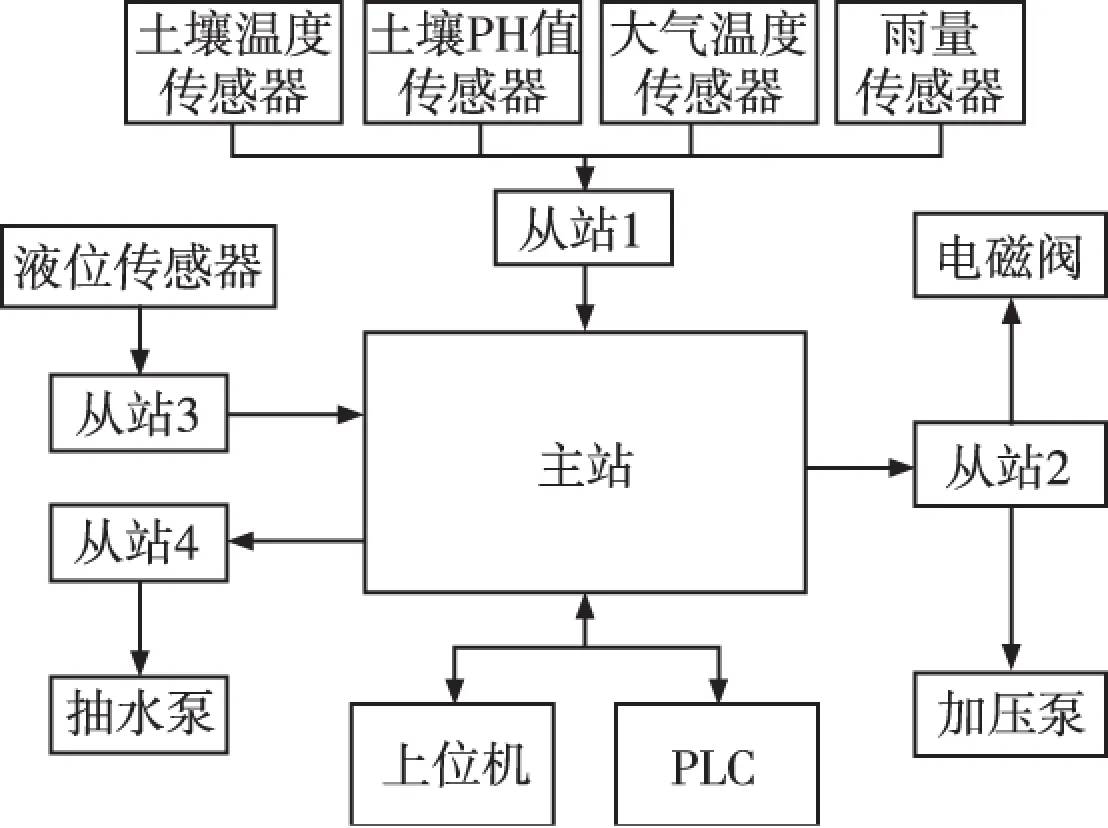
图1 系统主从站分配
模糊控制自动灌溉系统的结构组成包括:土壤湿度传感器、大气温度传感器、土壤PH值传感器、雨量传感器、液位传感器、高位水池、模糊控制单元、数据传输单元和执行单元—电磁比例阀以及泵。本文中的系统通过采集传感器数据,在上位机中进行模糊控制运算之后,输出控制模拟量到执行单元—电磁比例阀,改变电磁阀的开度,从而改变灌溉流量。同时,抽水泵将水抽到高位水池,高位水池和电磁阀有一定高度落差,水从高位水池经过过滤器过滤砂石,再经加压泵流到电磁阀中,阀开启之后进行灌溉。液位传感器监测高位水池水量状况,及时补充水源。主从站分配如图1所示。其中,从站1、3、4使用带模量输入和数字量输出的GPRS模块,从站2使用带模拟量输出的GPRS模块[3]。从站与主站实现长距离无线数据传输,主站与上位机通信。在上位机中实现状态监控、数据汇总以及模糊控制运算。
2 模糊控制器的设计
2.1 输入变量语言
在此系统中,模糊控制输入变量有:土壤温度传感器、大气湿度传感器、土壤PH值传感器、雨量传感器。输入值分别用tem、hum、ph、rafa表示,经过模糊化处理之后分别用TEM、HUN、PH、RAFA表示。定义其模糊集上的论域,都设为[0,10],对应的模糊子集分别为:
TEM={寒冷(CO),正常(C),炎热(HO)};
HUM={干燥(DR),正常(C),湿润(MO)};
PH={过酸(AC),正常(C),过碱(AL)};
RAFA={无降雨(N),有降雨(Y)}。
其对应的隶属度函数为论域上的gauss型连续函数为:
2.2 输出变量语言
在此系统中,模糊控制输出量为:控制电磁阀开度的电压模拟量,用V表示,其在模糊集上的论域为[0,1],模糊子集为:
V={关(CL),微开(LO),中开(MEO),全开(AO)}。经反模糊化后[4],对应输出电压值为v。
输出量V的隶属度函数为三角形:
2.3 建立模糊控制规则表
根据以上确立好的模糊子集和实际需要达到的经验性判断,不断修正隶属度函数和逻辑规则,得到了优化的控制规则,使得系统最终输出的控制信号无论是在控制逻辑上、平顺性上还是精度上都有了提升。
3 系统MATLAB仿真
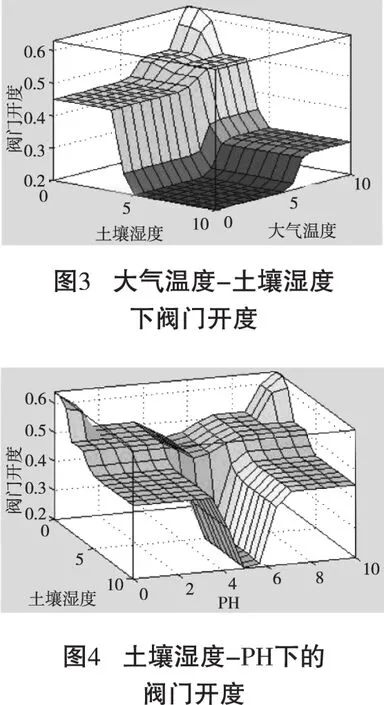
在MATLAB中模糊控制模块建立输入量和输出量的隶属度函数,选用Mamdani控制器,反模糊化选用重心法(centroid),输入图2所示的模糊控制规则之后得到了如图3 、图4的输出信号图。图3中可以看出, 阀门开度随着土壤湿度和大气温度的变化得到了比较理想的输出,随着大气温度升高,土壤湿度降低时,阀的开度变大,随着温度降低,湿度变高,阀的开度也在减小。由图4可以看到,在土壤湿度合适及湿润时,PH值适宜作物生长时阀的开度最小,而在土壤过酸或者过碱的恶劣情况下,阀的开度都较大。图5显示了在四输入分别为湿度正常,大气温度正常,无降雨量,PH值正常情况一下,对应阀的开度情况,此时阀的开度V基本为零。图6显示了四输入分别为土壤湿度情况为干燥、大气温度炎热、有较小降雨量、PH值偏酸的情况二下对应的阀的开度值,此时阀的开度V=0.76,阀的开度较大。将四个输入量分别调节到不同的输入量情况时,对应不同的模糊控制输出值V,根据实际经验,V符合现实生产的逻辑判断,并且可以看出阀的响应曲线比较平顺,没有出现开度值急剧变化的响应情况。

图2 控制规则表

GPRS模块组成从站和主站,从站将监测数据发送给主站,主站汇总从站数据上传给PLC和上位机PC,PLC做模糊控制运算和控制量输出,PC做数据采集的监控和显示,PLC与GPRS模块通信方式为modbus协议。PLC将控制信号传输给主站,主站通过寻址方式分配给从站,从站输出控制信号包含的数字量和控制阀开度的模拟量。以一个灌溉示范点为例,硬件选型和数量如表1所示。IO设备设置如图7所示。

表1 硬件选型

图7 IO设备设置
4 PLC的模糊控制方法

图8 PLC模糊控制流程图
本系统中使用的是S7-200型PLC,应用程序进行模糊控制运算。其具体的步骤如图8所示。模糊逻辑查询表可根据已经建立的MATLAB仿真内容在Simulink中生成[5-6],生成后将查询表放存入到PLC数据块中。
PLC模糊运算程序包括主程序OB1[7]、初始化子程序0、中断子程序0、子程序0、子程序1、子程序2、查询表数据块DB0。 扫描周期开始,程序执行主程序OB1,首次扫描时调用初始化程序0,对程序进行初始化,转载模糊运算过程的参数、连接模糊控制终端服务程序。为了按一定的采样频率进行[8],模糊运算在定时中断内完成。中断发生后,连接中断子程序0,完成模糊运算的初始化,载入模糊运算的量化因子和比例因子等。再调用子程序0、子程序1、子程序2完成采样数据的模糊化运算(将传感器数据tep, hun,ph,rafa乘以量化因子模糊化为TEP , HUM,PH,RAFA)插值运算、反模糊化输出(将输出的模糊控制量V乘以比例因子输出控制模拟量v)。其中,插值运算在调用查询表数据块DB0中完成。
量化因子的计算公式为:
其中R1、R2、M1、M2分别为实际测量值的上下限值和输入量论域上下限值。
比例因子的计算方法为:
其中S1、S2、X1、X2分别表示输出模拟量的上下限值和输出量论域上下限值。
5 结论
本文设计了一种基于模糊控制的自动灌溉系统,首先传感器采集土壤湿度、土壤PH值、大气温度、降雨量四个对农业种植有直接联系的模拟量值,通过无线传输模块将数据传输到PLC进行模糊运算,最终输出控制阀开度的模拟量,从而控制灌溉流量。通过MATLAB仿真的情况可以看到,阀的开度值满足现实控制情况要求,且输出变化平缓,系统稳定性较好。同时介绍了将西门子S7-200型PLC作为模糊控制器的应用方法,并与真实系统的结合,有较好的实用性。
[1] 徐忠辉,潘卫国,石红梅,等.自动灌溉控制系统的应用[J].北京水务,2010(5):48-51.
[2] 李宜汀,卢剑锋,杨肖委,潘振,等.基于PLC和GPRS模块的山地智能灌溉系统[J].现代机械,2016(1):52 -54.
[3] 李家春,王永涛,张萍,等.基于PC和C8051F的模糊灌溉控制系统[J].中国农村水利水电,2012(4):61-63.
[4] 蔚东晓,贾霞彦.模糊控制的现状与发展[J].自动化与仪器仪表,2006(6):4-7
[5] 邵文秀.模糊PID控制在工业色谱仪温控系统中的应用[D].南京:南京工业大学,2004.
[6] 向虹霖.基于PLC的模糊控制应用研究[D].成都:西南石油大学,2010.
[7] 罗庚兴.基于S7-300PLC的模糊控制器的设计[J].电气自动化,2012,34(1):22-24.
[8] 王志凯,郭宗仁,李琰.用PLC实现模糊控制的两种程序设计方法[J].工业控制计算机,2002,15(2):61-63.
The simulation and application of the automatic irrigation system based on the fuzzy control
CHE Shouquan,LU Jianfeng,LI Yiting,YANG Xiaowei
An automatic irrigation system based on fuzzy control and electromagnetic proportion valve was designed, and simulation was carried out in MATLAB. This system consists of sensors, signal transmitting -receiving devices, control unit and executive components. The sensor signal was collected to do the fuzzy operation process by PLC, according soil moisture needed. The control signal is export to the executive component to control the opening of the solenoid valve, the flow of spray Irrigation was controlled. This method designed the analog input of fuzzy control and membership function of the opening of the solenoid valve, considering the practical application of the system. The simulation results reveal this system meet the expected control requirements.
fuzzy control, MATLAB simulation, automatic irrigation, PLC
TP273+.4
A
1002-6886(2016)06-0081-04
贵州省科技计划(工业攻关),黔科合GY字[2014]3025。
车守全(1992-),贵州纳雍人,贵州大学机械电子工程硕士研究生。
2016-05-26
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
天津农林科技(2020年3期)2020-08-13
现代装饰(2020年7期)2020-07-27
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
湖北农机化(2020年4期)2020-07-24
电子制作(2019年15期)2019-08-27
电子制作(2018年23期)2018-12-26
节水灌溉(2018年10期)2018-11-01
通信电源技术(2018年3期)2018-06-26
商(2016年28期)2016-10-27
