
舵机卡死对X型舵飞航导弹控制性能的影响
2016-12-14 01:25贾旭山
弹道学报 2016年4期
林 木,贾旭山,张 凯
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
舵机卡死对X型舵飞航导弹控制性能的影响
林 木,贾旭山,张 凯
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
建立了X型舵飞航导弹舵机卡死故障条件下执行机构输入与输出的关系模型,分析了舵机卡死引起舵效降低、常值误差和控制耦合三方面效应对导弹控制性能的影响。为考察不同时刻舵机卡死影响的差异,建立了导弹六自由度数学模型。仿真结果表明,单个舵机卡死会造成导弹控制性能下降,命中点散布变大;在一些极端初始条件下,俯仰和偏航通道产生严重的控制耦合,会使弹道畸变,导致导弹坠落。对飞行试验中出现的案例进行分析,验证了仿真分析结论的正确性。
飞航导弹;飞行控制系统;舵机故障;弹道仿真
飞航导弹的操纵面包括升降舵面、方向舵面和副翼,其中升降舵提供俯仰力矩,方向舵主要提供偏航力矩,副翼主要提供滚转力矩[1]。导弹常用的舵面布置方案中,“十”字型布置的升降舵和方向舵相互独立,一旦其中某个操纵面出现故障,如执行机构锁死或者归零等,将造成严重的后果[2-3]。而采用“×”型舵的导弹可由多个舵面同时提供控制力矩,提高了导弹控制的容错能力,即使某一个舵机出现了故障,故障舵面提供的控制力矩可由其他舵面代替产生,导弹仍然具有一定的控制能力。
本文以反舰导弹为研究对象,分析“×”型布局下单个舵机卡死故障对导弹控制性能的影响,并以导弹飞行试验中出现的舵机卡死故障为案例进行了验证。
1 舵机执行机构输入输出模型
1.1 舵控指令的分配
某型反舰导弹采用尾舵控制的“×-×”型气动外形布局,中部固定式弹翼与尾舵安装角度相同,弹翼负责为导弹提供升力,尾舵由4个舵机共同完成导弹俯仰、偏航和滚转的控制。图1是该型导弹尾舵配置方案的后视图。舵机编号沿导弹纵轴逆时针依次为D1、D2、D3和D4;y和z分别为弹体系y轴、z轴的指向;图中舵面附加方块表示舵面正向偏转时舵面后缘在后视图的投影。三通道舵控信号与4个舵面偏转角的等效关系写成矩阵形成为式中:δx,δy,δz分别为滚转、偏航和俯仰三通道舵控信号;d1,d2,d3,d4为4个舵面的偏转角。
(1)
式(1)使用3个方程约束了4个未知数,该方程组有无穷多解,为充分利用4个舵面的控制能力,使舵面控制有最小二乘意义下的最优解,使用Penrose-Moore伪逆法求解[4],得到该型导弹舵控指令号分配如下:
(2)
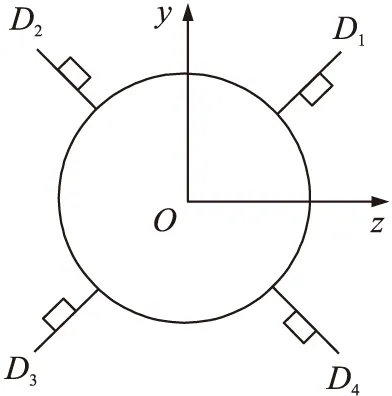
图1 X型操纵舵面正向偏转后视图
1.2 舵机卡死后执行机构模型
设在某时刻之后,导弹4号舵机卡死,舵机卡死时刻三通道控制指令信号为δx0、δy0和δz0,则4号舵机卡死后,式(2)中的导弹舵控指令分配模型变为
(3)

(4)
观察式(4)中的第3项,舵机卡死后,在通道间产生了控制耦合,比如滚转通道中,引入了偏航和俯仰控制的差指令信号0.25(δy-δz)。这样将导致各通道间的控制相互影响,造成导弹稳定性变差,根据式(4),某一通道控制耦合程度的大小取决于另外2个通道的和信号或差信号。
2 舵机卡死故障影响理论分析
2.1 舵效降低的影响
如果把式(4)中的常值误差项和耦合项看作是满足特定规律的外来扰动,那么在舵机卡死后,相当于舵系统的开环放大系数降低了25%,传递函数的形式不变,下面分析开环放大系数降低带来的影响。
通常,舵系统中需要引入反馈,以提高执行机构的快速性和稳定性,改善执行机构的性能。图2是采用位置反馈的舵系统框图,通过测量舵机偏转位移量X,并反馈回舵控信号,可以提高舵机的响应速度和稳定性,进而提高整个舵系统的性能。考虑是在负载情况下,气动舵机的动力学特性可用惯性环节表示,图2所示的舵系统可以用图3描述[5]。图中,KZF和KDJ为综放和舵机放大系数,KOC为反馈系数,iK为舵控信号,τDJ为舵机时间常数,tDJ为舵机延迟时间。

图2 带位置反馈的舵系统结构图

图3 带负载的舵系统框图
对图3中采用硬反馈(反馈满足线性条件)的舵系统来说,开环放大系数K0=KZFKDJKOC是影响其动态品质的最重要因素,K0越大,舵系统的快速响应越好。当K0足够大并且忽略舵机本身的惯性时,即tDJ≈0,则舵系统的时间常数τDX满足[5]:
(5)
由此可见,舵系统开环放大系数降低会导致时间常数增大,影响其响应速度。根据文献[6]的分析,舵系统时间常数的增大会对制导系统的命中精度产生不良影响。此外,舵系统开环放大系数的减小还会导致整个回路相对阻尼系数减小[5],进而导致导弹姿态角控制的超调量增大,影响导弹姿态稳定控制品质。
2.2 常值误差的影响
根据式(4),舵机卡死带来的常值误差等于舵机卡死时刻舵控指令信号的代数和,该值大小不会随时间的推移发生变化,因此可以看作是在导弹控制回路中施加了一个阶跃扰动力矩。
通常情况下,反舰导弹姿态控制系统通过引入积分环节来消除系统静差,因为控制系统中包含积分控制作用,只要终值误差不为0,控制系统就一定会产生一个持续增长的输出力矩来抵消阶跃力矩的作用,力图减小这个误差,只有当终值误差等于0时,才使得控制系统输出的力矩与阶跃扰动力矩大小相等而方向相反,这时系统取得平衡进入稳态[7]。
在系统进入稳态以前,导弹的位置变量会产生偏移,即导弹实际弹道相比于理论弹道会产生偏差,尤其对于不引入位置反馈的偏航通道来说,姿态调整会产生较大的位置偏差。因此,如果舵机卡死时刻接近飞行末端,舵机卡死会导致制导命中精度下降,其他情况下,导弹控制系统基本可以消除常值误差带来的影响。
2.3 控制耦合的影响
对系统内部耦合程度进行定量分析时,可使用相对增益[8]来衡量输入量uj对输出量yi的影响。这里把舵控指令作为输入量,把实际舵面偏转角度作为输出量,相对增益矩阵可写为
(6)
式中:λ11,λ22,λ33分别为滚转、偏航和俯仰通道的相对增益,可以表征其耦合程度,其计算公式可以表示为
(7)
式中:pij为输入通道uj到输出通道yi的开环增益系数,qij为输入通道uj到输出通道yi的闭环增益系数。相对增益为1时,通道无耦合作用,工程上认为,相对增益大于1.2或者在0.37~0.7之间时,通道之间耦合情况比较严重。经计算,舵机卡死后,三通道相对增益均为1.5,控制耦合比较严重。
3 导弹六自由度仿真及分析
为了分析舵机卡死时刻不同对导弹制导命中精度的影响,建立了导弹六自由度模型,进行仿真计算。仿真过程中,由制导律解算模块给出三通道控制指令,然后根据式(2)进行舵面转换,得出实际的舵机偏转角度,再将实际偏转角度输入弹体动力学及运动学模块进行解算。整个导弹仿真模型数据流如图4所示。图中,Fp和Fx,Fy,Fz为导弹受到的推力和空气动力;Fcx,Fcy,Fcz为舵机产生的控制力;Msty、Mstz,Mdx、Mdy、Mdz,Mcx、Mcy、Mcz依次为导弹受到的稳定力矩、阻尼力矩和操纵力矩;α、β、γV,αW、βW、γVW分别为导弹不考虑风以及考虑风的攻角、侧滑角和速度倾斜角;θ,ψV分别为弹道倾角和弹道偏角;ϑ,φ,γ分别为俯仰角、偏航角和滚转角;ωx,ωy,ωz为姿态角速度;vW,v,Ma,q分别为风速以及导弹的速度、马赫数和动压;m为导弹质量;Jx,Jy,Jz为转动惯量;x、y、z,xt、yt、zt分别为导弹和目标的位置;h,hm分别为导弹高度与测量高度。
不考虑目标运动和随机风的影响,以舵机正常情况下导弹制导命中脱靶量(导弹实际命中点相对于理论命中点的偏差,用高度脱靶量和侧向脱靶量表示)的均值和标准差作为参照,在导弹飞行初段、转弯降高段和飞行末段3个特征点,分别仿真研究舵机卡死故障对导弹控制性能的影响。参考弹道飞行总时间55 s,35 s完成转弯降高,发射扇面角2.01°,目标高度5 m。舵机正常工作时,侧向脱靶量均值-1.5 m,标准差0.7 m,高度脱靶量均值-0.6 m,标准差0.1 m。导弹飞行10 s,30 s和50 s时设定4号舵机卡死,仿真500次,侧向脱靶量均值分别为-2.6 m,-2.7 m和-2.6 m,标准差分别为0.4 m,0.4 m和0.5 m;高度脱靶量均值分别为-0.2 m,-0.7 m和-1.6 m,标准差分别为0.5 m,0.5 m和0.2 m。命中点散布如图5所示。图中,Δh和ΔX分别为高度脱靶量和侧向脱靶量。

图4 导弹六自由度仿真模型数据流向图

图5 导弹仿真命中点散布图
通过上述分析,舵机卡死后,导弹控制性能下降,命中点散布变大,有可能导致导弹脱靶。另外仿真过程中还发现,某些极端初始条件下,控制耦合作用严重时,偏航通道的转弯控制信号会造成导弹降高时高度发生振荡,使导弹坠落,如图6所示。

图6 控制耦合造成导弹飞行高度振荡示意图
4 舵机卡死故障案例分析
飞行试验中,在某时刻之后,导弹4号舵机卡死,直至导弹飞行结束。试验数据表明(图7),4号舵机卡死后,弹体开始小幅振荡并逐步收敛,俯仰通道受到的影响最小,倾斜和偏航通道受影响较大,出现了同频振荡,振荡调整后弹体趋于稳定,最终仍命中目标,脱靶量与正常飞行情况相比偏大。

图7 故障导弹姿态角
由前面2.3节分析可知,三通道的相对增益是相同的,但在系统实际运行中,各通道耦合信号的大小是有区别的。这里将式(4)中的第3项定义为耦合舵偏角,分别记作Δδx,Δδy和Δδz,根据试验数据,各通道耦合舵偏角见图8。可以看出,偏航和滚转通道的耦合舵偏角比俯仰通道大,这是导致滚转、偏航通道的振荡幅度大于俯仰通道的主要原因。另外,各通道传递函数的阶次和参数不同,也是导致这一现象的原因之一,这里不再赘述[9]。可见,前面的理论分析解释了该案例的故障现象,为该次试验故障定位提供了理论依据。

图8 三通道耦合舵偏角
5 结束语
本文研究了舵机故障对“×”型舵飞航导弹控制稳定性能的影响,分析了舵机故障对导弹控制产生影响的机理,包括舵效降低、常值误差和控制耦合,并进行了仿真分析计算。仿真计算结果表明,单个舵机卡死后,一般情况下导弹可以依靠冗余的舵机完成控制飞行,但控制性能下降,命中点散布变大,侧向脱靶量均值由-1.5m增大到-2.6~2.7m,高度脱靶量由-0.6m增大到-0.7~-1.6m。在一些特定的初始条件下,舵机卡死还会导致导弹坠落。本文对“×”型舵机卡死故障影响的理论分析,可为类似故障现象定位提供参考依据。
[1] SIOURIS G M.导弹制导与控制系统[M].张天光,王丽霞,宋振峰,译.北京:国防工业出版社,2010:105-106.
[2]杜凤怀,王萧,孙虎员.舵机卡死故障的导弹容错控制研究[J].弹箭与制导学报,2008,28(5):68-72. DU Feng-huai,WANG Xiao,SUN Hu-yuan.Fault-tolerant control on missile rudder deadlock[J].Journal of Projectiles,Rockets,Missiles and Guidance,2008,28(5):68-72.(in Chinese)
[3]李江涛.典型故障模式下飞航导弹容错与重构算法研究[D].哈尔滨:哈尔滨工业大学,2010. LI Jiang-tao.Research of fault tolerant and reconfiguration algorithm on winged missile with typical failuers[D].Harbin:Harbin Institute of Technology,2010.(in Chinese)
[4]靳凌,董继鹏.考虑舵机故障的空空导弹飞行控制系统主动容错控制[J].弹箭与制导学报,2014,34(6):5-7. JIN Ling,DONG Ji-peng.Active fault-tolerant flight control system design of air-to-air missile considering rudder faults[J].Journal of Projectiles,Rockets,Missiles and Guidance,2014,34(6):5-7.(in Chinese)
[5]彭冠一.防空导弹武器制导控制系统设计[M].北京:宇航出版社,2005. PENG Guan-yi.Air defense missile guidance control system design[M].Beijing:China Astronautic Publishing House,2005.(in Chinese)
[6]王旭刚,王中原.弹体滚速和舵机时间常数对炮弹制导精度的影响[J].南京理工大学学报,2011,35(2):182-186. WANG Xu-gang,WANG Zhong-yuan.Effect of roll angular velocity and actuator time constant on guidance precision of guided projectile[J].Journal of Nanjing University of Science and Technology,2011,35(2):182-186.(in Chinese)
[7]胡寿松.自动控制原理[M].北京:国防工业出版社,1990. HU Shou-song.Automatic control theory[M].Beijing:National Defense Industry Press,1990.(in Chinese)
[8]孙瑞胜,薛晓中,付琳.一种制导炸弹的侧向运动的解耦控制[J].弹箭与制导学报,2005,24(3):110-112. SUN Rui-sheng,XUE Xiao-zhong,FU Lin.Decoupling control for a guided bomb’s horizontal movement[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,24(3):110-112.(in Chinese)
[9]孟秀云.导弹制导与控制系统原理[M].北京:北京理工大学出版社,2003:31-34. MENG Xiu-yun.Missile guidance and control system theory[M].Beijing:Beijing Institute of Technology Press,2003:31-34.(in Chinese)
Effect of X-Rudder Locking on Control Performance of Cruise Missile
LIN Mu,JIA Xu-shan,ZHANG Kai
(Unit 92941 of PLA,Huludao 125000,China)
A relationship model of input and output of X-rudder missile servo system under locking fault conditions was established.The influences of three aspects caused by a stagnation fault of servo system on control performance of missile were researched,including the descent of rudder effect,the introduction of constant error and the coupling of control system.In order to investigate the difference when missile servo system was locked at different time,a six-degree-of-freedom model of missile was established.The simulation result shows that one rudder locking can result in control performance degradation and impact point dispersion increase of missile.Under some extreme initial conditions,the pitch channel and yaw channel coupling can cause missile dropping.A case in flight test was analyzed,which verified the correctness of the simulation analysis conclusion.
cruise missile;flight control system;rudder fault;trajectory simulation
2016-06-12
林木(1983- ),男,工程师,学士,研究方向为装备试验。E-mail:rs023@163.com。
TJ761.5
A
1004-499X(2016)04-0052-05
猜你喜欢
装备环境工程(2022年9期)2022-10-13
商品与质量(2021年43期)2022-01-18
兵器装备工程学报(2021年12期)2022-01-11
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年1期)2018-04-04
科学与财富(2018年1期)2018-03-03
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
航空模型(2016年5期)2016-07-25
