变速恒频双馈异步风力发电系统建模及仿真
2016-12-12 03:45林立姚婻袁旭龙赵海燕
邵阳学院学报(自然科学版) 2016年2期
林立,姚婻,袁旭龙,赵海燕
(邵阳学院 电气工程系,湖南 邵阳,422000)
变速恒频双馈异步风力发电系统建模及仿真
林立,姚婻,袁旭龙,赵海燕
(邵阳学院 电气工程系,湖南 邵阳,422000)
为研究变速恒频双馈异步风力发电系统,建立了包含风速、风力机和风力机控制部分、双馈发电机、双PWM变换器及双馈发电机机侧和网侧矢量控制变速恒频风力发电系统的动态数学模型;在Matlab/Simulink环境下,以建立相应的风力发电系统动态数学模型为基础搭建了变速恒频双馈异步风力发电系统仿真模型,并对转子侧等功率因素策略及定子侧功率解耦控制策略进行了仿真,仿真结果验证了数学模型及控制策略的有效性,整个系统模型的建立,为开展风力发电并网、低电压穿越及其他高性能控制策略研究打下基础,对于研制高性能的风电装置设备具有较好的参考价值.
风力发电;变速恒频;动态模型;系统仿真
风力发电作为清洁能源,成为当今研究的热点[1-5].随着电力电子技术的发展,恒速恒频(Constant Speed Constant Frequency, CSCF)风力发电系统因发电效率低等缺点,被变速恒频(Variable Speed Constant Frequency,VSCF)风力发电所替代[6].目前,VSVF风力发电系统比较有发展前途的是双馈异步发电机(Doubly Fed Induction Generator,DFIG)系统和直驱永磁同步机(Permanent Magnet Synchronous Generator,PMSG)系统两种类型[7];同时,风力发电风力机组也从定桨距型向变桨距型发展.为了深入研究变速恒频异步风力发电系统高性能控制策略,进行半实物仿真、缩短研发周期,实现产品级代码,研制高性能的风电控制装备,建立风力发电系统仿真模型,具有重要的实际价值.为此,文献[8-10]有效的开展了这方面的工作,为研究高性能的风电装备打下了基础,但存在整个系统各部分环节不明晰的缺点,影响进一步深入研究工作的开展.因此,本文以变速恒频双馈异步风力发电系统为研究对象,在分析系统结构及工作原理的基础上,分环节建立相应的数学模型,该模型包括风速模型、风力机及传动部分模型、双馈发电机模型、变频器模型、桨距角和转子双PWM控制器模型六部分.并在Matlab/Simulink环境下,建立风电机组及控制器系统仿真模型,并进行系统及控制策略的仿真,仿真结果验证了系统模型及控制策略的有效性.变速恒频异步风力发电系统仿真模型的建立,为研究空载并网、负载并网、最大功率点追踪(Maximum Power Point Tracking,MPPT),低电压穿越及其他高性能控制策略的应用研究打下基础,对研制高性能的风电装置设备具有重要意义.
1 系统组成及工作原理
变速恒频双馈异步风力发电系统模型如图1所示.系统模型由风速模型、风力机模型、双馈异步发电机和变频器模型、电网、并网处母线电压、转子双PWM控制器和桨距角控制等部分组成.风速模型模拟风电场实况;风力机模型模拟变桨距风力机工况;双馈发电机模拟异步发电机工作;变频器模型模拟双PWM背对背结构工况;转子双PWM控制器基于DSP2812事件管理器产生的12路SVPWM控制,并实施磁场定向或直接转矩控制等控制策略;桨距角控制模拟对风力机的控制,以实现MPPT;并网处母线电压模拟并网、电压穿越等控制实况.整个系统通过控制部分(桨距角控制与双转子PWM控制器)工作在发电运行或并网动作两种状态.其一,工作在发电状态时,双馈异步发电机工作在同步、超同步和亚同步三种状态时,通过控制器控制转子交流励磁电流,从而实现对双馈异步发电机所产生的定子电压(电压幅值、频率和相位恒定)的有效控制,发出的交流电直接与电网相接,当DFIG工作在超同步状态和亚同步转态时,通过控制转子双PWM控制器控制背对背的12个电力电子开关,如IGBT ,转子侧实现能量在电网与转子之间的双向流动,再辅之以MPPT控制,实现整个系统能量的高效转换;其二,当系统工作在并网状态时,为实现并网条件(DFIG定子电压与与电网电压同幅、同频、同相位),通过控制器实现空载或负载并网,并网结束后切换到发电运行控制状态.

图1 变速恒频双馈异步风力发电系统结构简图Fig.1 Structure diagram of variable speed constant frequency doubly fed induction wind power system
2 双馈异步风力发电系统数学模型
2.1 风速模型
风力发电系统以风能作为原动力,风速状况直接决定了系统的动态特性.风速一般可用3种模型进行模拟:渐变风、随机风和阵风,如图2所示,这3种模型可用Matlab的Function函数编程实现.

图2 风速模型简图Fig.2 Wind speed model
2.2 风力机及传动部分模型
风力机的机械输入转矩TW与风速VW的关系可表示为:
(1)
式中ρ为空气密度;R为风力机半径;θ为桨叶的桨距角;γ为叶尖速比γ=RωW/VW,ωW为风力机转子转速,VW为风速,CP为与桨距角θ和叶速比γ有关的功率系数.
风力机从风中捕获的功率为:
PW=TWωW
(2)
风力发电传动系统牛顿运动方程为:
(3)
式中:Jeq为机组的等效转动惯量;Bm为转动粘滞系数;Te为DFIG电磁转矩;ωg为DFIG发电机转子的机械角转速,且ωg=ωw.根据式(1)-(3)可以利用积分、微分及Function函数编写程序建模.
2.3 双馈风力发电机模型
为便于实现对DFIG的有效控制,根据等功率及等磁链变换法则,通过Clarke变换(3/2变换)、Clarke逆变换(2/3 变换)、Park变换(旋转变换)及其逆变换(Ipark变换),DFIG在稳态运行时的d-q轴数学模型为:
(4)
式中:Ls、Lr、Lm分别为定子自感、转子自感和定转子互感;usd、usq为定子电压的d、q轴分量;urd、urq为转子电压的d、q轴分量;isd、isq为定子电流的d、q轴分量;ird、irq为转子电流的d、q轴分量;ωe为d-q坐标系旋转电角速度.
结合d-q轴坐标下的DFIG电磁转矩方程、式(3)及式(4),可以用Matlab/Simulink建立DFIG仿真模型,利用这一模型,可以方便引出需要的usd、usq、urd、urq、isd、isq、ird、irq及ωe等物理量,以便实施其他高性能控制策略.
2.4 双PWM变换器模型
DFIG双馈风力发电系统转子侧一般采用背对背双-PWM变换器,机侧采用六个IGBT电力电子开关的PWM控制,网侧也采用六个电力电子开关IGBT的PWM控制,双PWM变换器模型如图3所示.为建立整个系统的仿真模型,可分别建立电机侧和电网侧变流器数学模型.
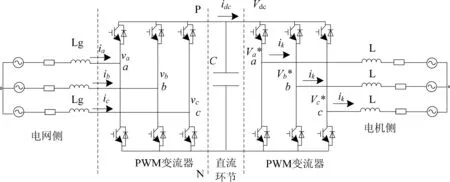
图3 双PWM变换器模型Fig.3 Model of double PWM converter
2.4.1 电机侧变流器数学模型
电机侧变流器可以工作在整流或逆变两种工作状态,这两种状态均可以采用PWM控制.工作在逆变状态时,电机侧逆变器三相输出电压满足:
(5)
DFIG逆变器直流侧电流idc作为网侧变换器直流侧的负载电流,且满足:
(6)
其中,Vdc为直流母线电压,Sa,Sb,Sc为三相桥臂开关函数.Sk,ik分别为转子侧逆变器三相桥臂开关函数和三相负载电流.DFIG的转子作为逆变器的负载,ik即为双馈电机转子三相电流,据式(5)-(6)可得转子侧变流器的Matlab/Simulink仿真模型,即典型三相电压源型逆变器模型.
2.4.2 电网侧变流器数学模型
对于三相电压源型变流器,存在下述关系:
(7)
(8)
据式(7)-(8)可得网侧变流器的仿真模型.其中,e1、e2、e3和i1、i2、i3分别是交流输入侧三相电压Va、Vb、Vc和电流ia、ib、ic;S1、S2、S3为三相桥臂的开关函数;Lg、R为进线电感和等效电阻;C为直流侧滤波电容,Vdc为输出直流电压.
2.5 双PWM变换控制器模型
为实现对DFIG转子的有效控制,一般进行矢量控制策略,整个系统的控制原理框图如图4所示.机侧和网侧均可进行双PWM矢量控制.

图4 双PWM变换控制器原理框图Fig.4 Schematic diagram of dual PWM transform controller
2.5.1 机侧矢量控制器模型
结合图4,机侧矢量控制的系统原理图见图5所示.机侧变流器矢量控制的基本原理是,通过电压和电流传感器检测DFIG定子侧电压和电流,经Clarke变换,得到定子两相电流和电压,进而计算出定子磁链位置,结合检测到的转子位置,计算出定子磁链与转子位置的位置差,给定有功和无功与计算得到的有功及无功进行PI调节,分别得到dq轴转子电压参考值,该参考值分别与实际的dq轴电压偏差值分别进行PI调节,经Clarke逆变换及Park逆变换,分别得到PWM变换控制的调制波电压参考值,进行实现SPWM控制,控制机侧六个IGBT的通断控制.
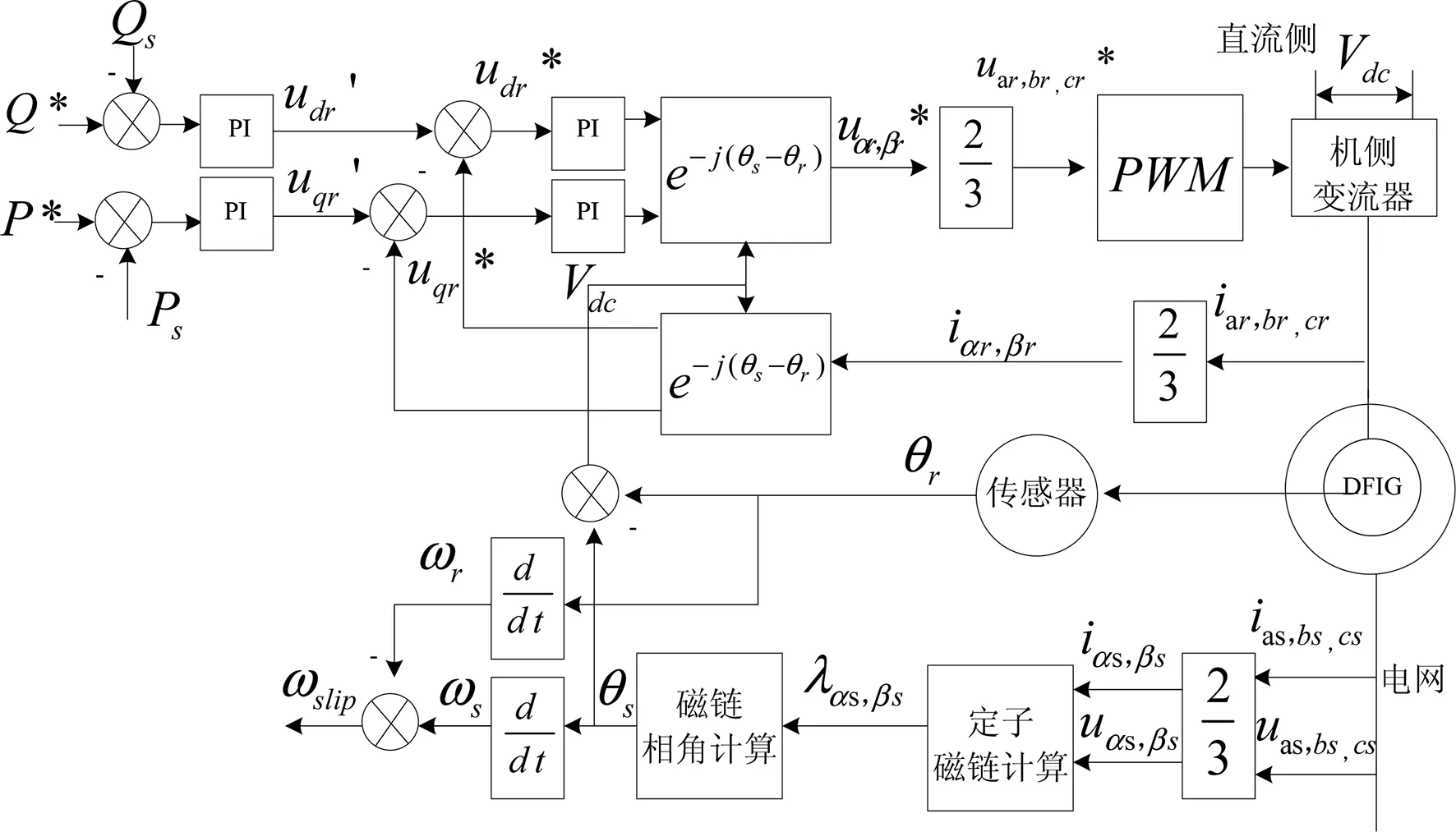
图5 机侧变流器矢量控制器模型Fig.5 Vector controller model of DFIG converter
2.5.2 网侧矢量控制器模型
网侧矢量控制原理如图6所示,直流侧给定电压和q轴参考电流分别与直流侧电压及网侧dq轴的q轴电流进行PI偏差调节控制,最后经静止及旋转逆变换得到PWM控制的调制波电压,进而实现对机侧变流器的通断控制.
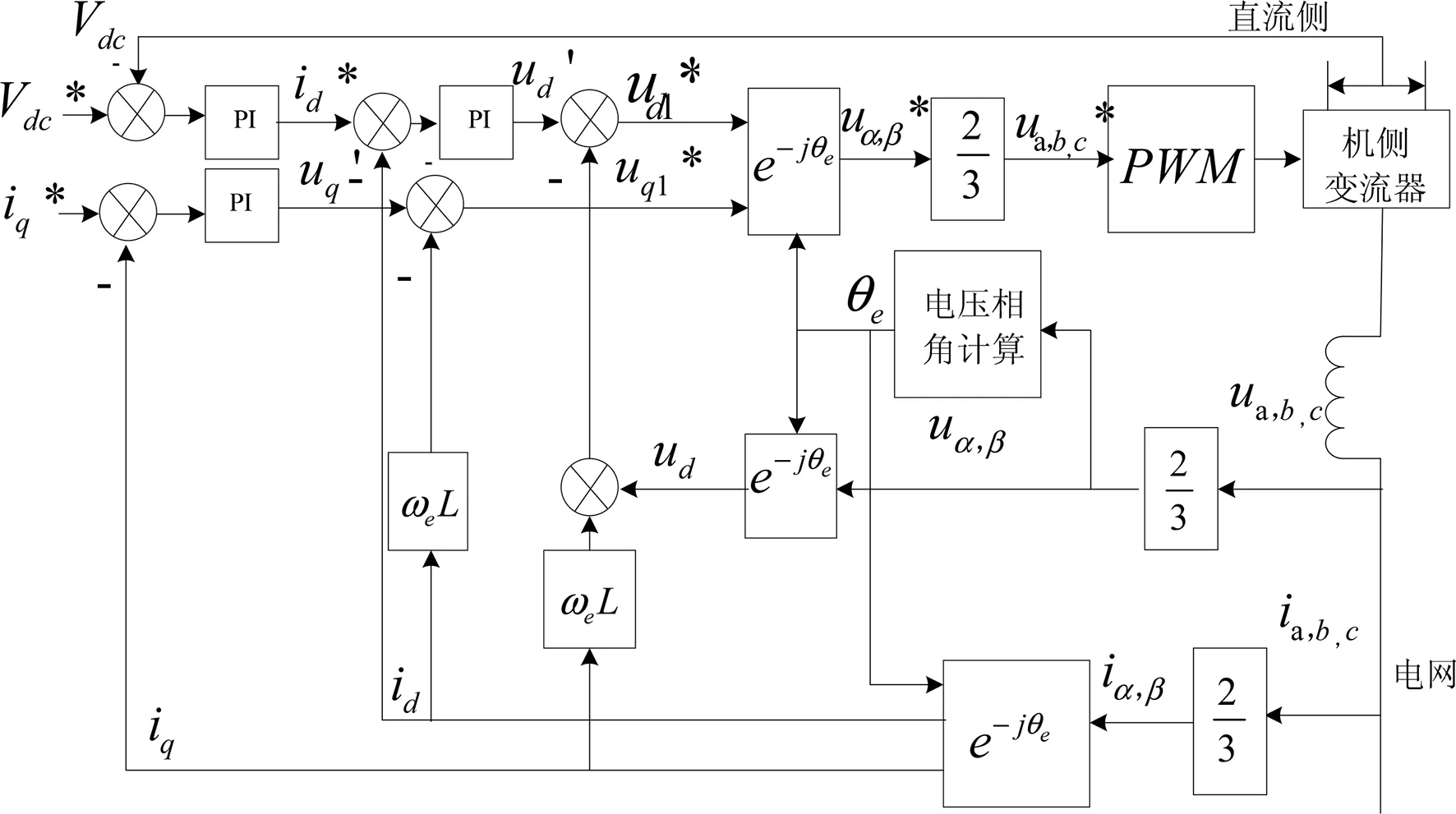
图6 网侧变流器矢量控制器模型Fig.6 Vector controller model of grid converter
2.5.3 桨距角的控制
桨距角的控制设计采用变桨距风力发电典型的桨距控制系统,具体结构如图7所示.其中,β为桨距角;V为风速,m/s;τ为控制器伺服机构时间常数,s;kw、kpi、kpp为控制器参数、Pe、Peref为风力发电机组输出总有功功率和给定的参考有功功率.
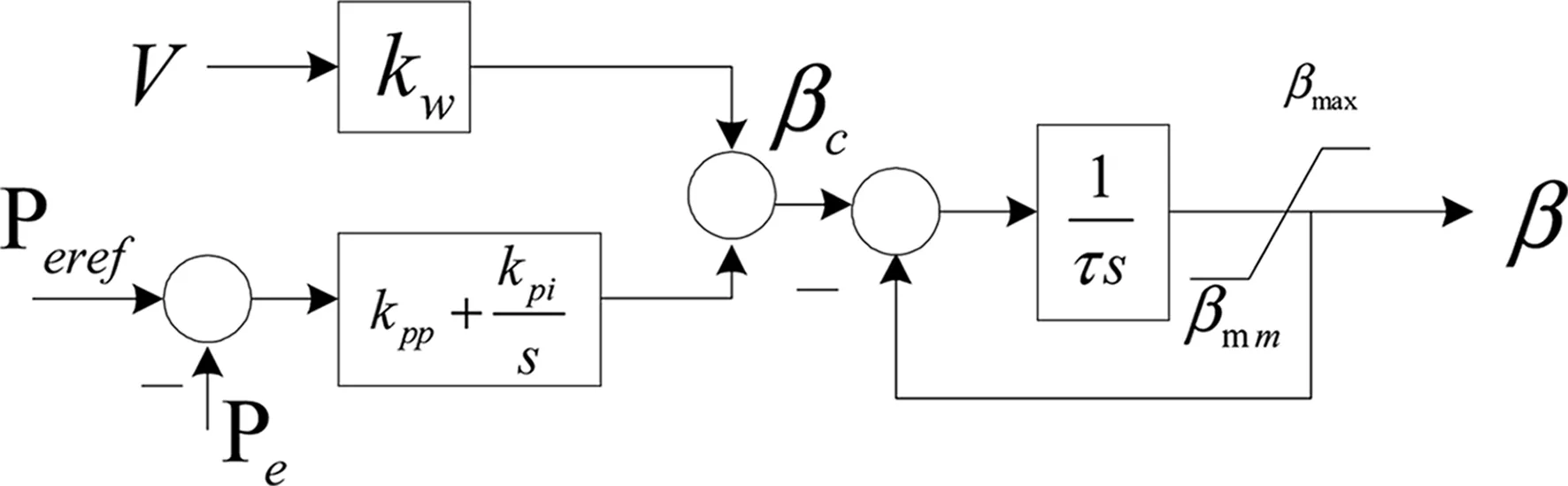
图7 桨距角控制模型Fig.7 Pitch angle control model
3 系统仿真及分析
依据前面的分析建模原理,在Matlab/Simulink仿真环境下建立整个系统的仿真模型.得到的仿真波形分别如图8-10所示.图8表明,定子电压和电流同步,实现单位功率因数控制,并实现PWM整流,整流后效果较好.图9表明,逆变运行时网侧电压和电流同步,也实现了单位功率因数控制;图10表明,风速、发电机转速、桨距角、定子输出用功和无功较好的吻合前面的理论分析,表明系统仿真模型的正确性.

图8 单位功率因数整流运行网侧电压电流和直流电压波形Fig.8 Waveform of unit power factor rectifier operating network side voltage current and DC vottage
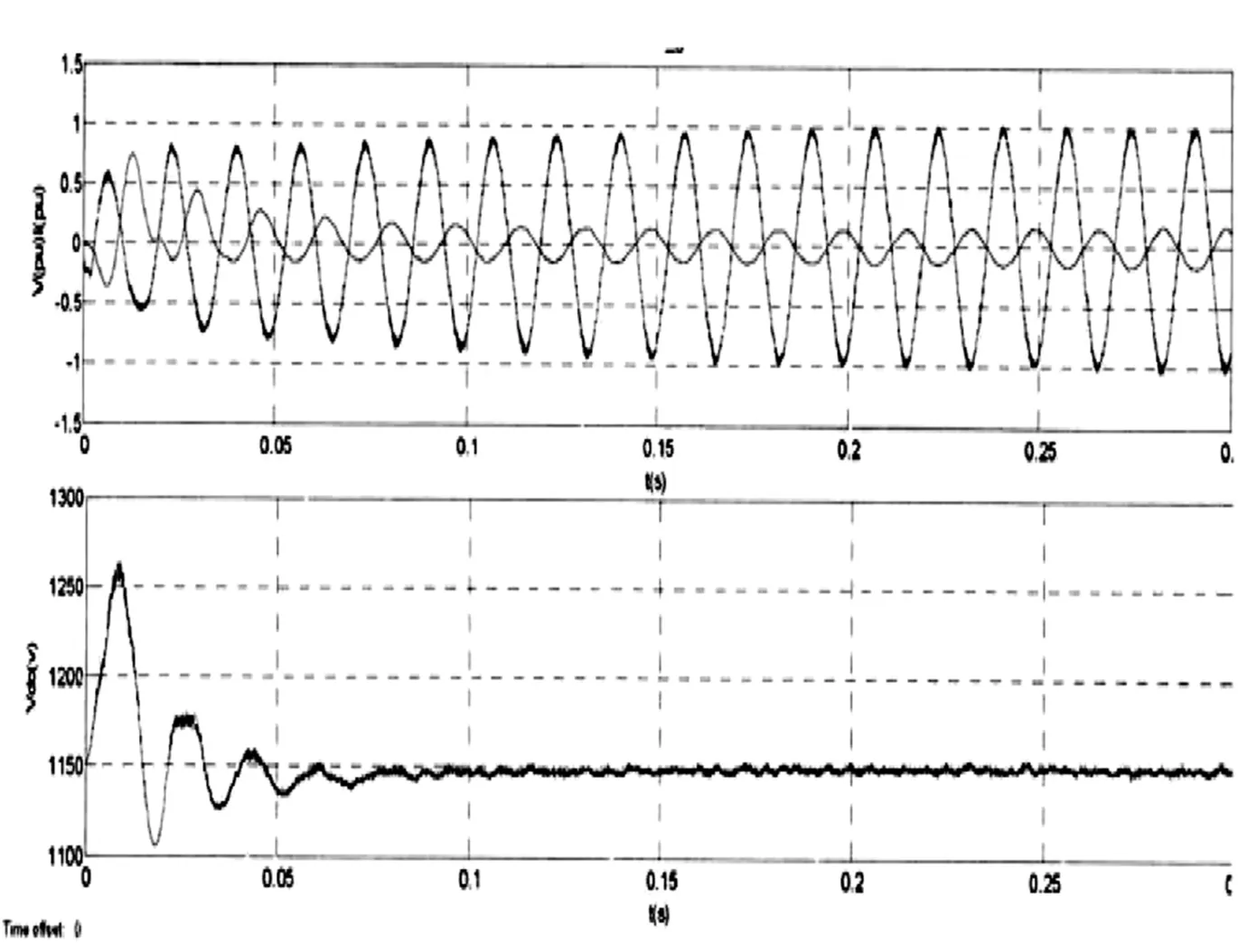
图9 单位功率因素逆变运行网侧电压电流和直流电压波形图Fig.9 Waveform of unit power factor inverter operation network side voltage current and DC vottage
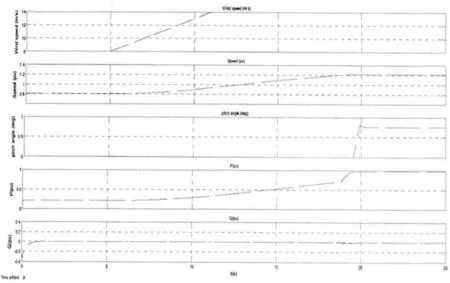
图10 风速、发电机转速、桨距角、定子输出有功和无功波形图Fig.10 Waveform of wind speed、rotational speed、pitch angle、stator active output
4 结论
本文分析了双馈异步风力发电系统的组成及各部分的工作原理,并对常见的矢量双PWM控制进行了系统建模仿真,仿真模型的建立可进行变速恒频双馈风力发电系统若干关键技术的研究,如恒速恒频、变速恒频、定桨距、变桨距DFIG双馈异步风力发电和直驱永磁同步发电、并网条件(电压)、发电控制、并网控制(双PWM控制)的对比研究,也可开展高性能控制策略,如矢量控制策略、非线性控制及准同步,次同步,超同步运行时的研究,所建系统模型有较好的参考价值.
[1]王晓东,李怀卿,刘颖明,等.风电机组转矩的非线性控制[J].电工电能新技术,2016,35(1) :19-23.
[2]吴振奎,刘平,马林. 双馈风力发电机网侧PWM变换器控制系统设计[J].辽宁工程技术大学学报(自然科学版),2016,35(1) :59-64.
[3]杨新法,苏剑,吕志鹏,等.微电网技术综述[J]. 中国电机工程学报,2014,34(1) :57-60.
[4]周志超,王成山,郭力,等. 变速变桨距风电机组的全风速限功率优化控制[J]. 中国电机工 程学报,2015,35(5) :1837-1842.
[5]李晶,宋家葬,王伟胜. 大型变速恒频风力发电机组建模与仿真[J].中国电机工程学报,2004,24(6) : 100-105.
[6]王锋,姜建国.风力发电机用双PWM变换器的功率平衡联合控制策略研究[J].中国电机工程学报,2006,26(22):134-137.
[7]赵永祥,夏长亮,宋战锋,等.变速恒频风力发电系统风机转速非线性PID控制[J].中国电机工程学报,2008,28(11):133-138.
[8]周宁,付磊,杨佳,等.双馈风力发电系统实时仿真试验研究[J].中国电机工程学报,2013,33:8-12.
[9]刘其辉,贺益康,赵仁德.交流励磁变速恒频风力发电系统的运行与控制[J].电工技术学报,2008,23(1):129-132.
[10]李晶,宋家骅,王伟胜.考虑变频器特性的变速恒频双馈风力发电机组控制策略的研究与仿真[J].电网技术,2004,28(21):11-15.
Modeling and simulation of variable speed constant frequency doubly-fed induction wind generator system
LIN Li,YAO Nan,YUAN Xulong,ZHAO Haiyan
(Department of Electrical Engineering,Shaoyang University,Shaoyang 422000,China)
In order to study variable speed constant frequency doubly-fed induction wind generator system,a whole model for variable speed constant frequency doubly-fed induction wind generator system is presented and the model includes wind speed、wind-turbine and pitch control、doubly-fed generator、double-PWM converts and electrical control of the generator. Based on the mathematic models,a simulation model is developed by using Matlab/simulink. Then power factor and power-decouple control strategy in the simulation platform are studied. The simulation results show that the model founded is correct. Using the simulation platform, the other control strategy can be researched in wind generator equipment.
wind power;variable speed constant frequency;dynamic model;system simulation
1672-7010(2016)02-0052-06
2016-01-05
湖南省科技厅重点研发计划项目(2015GK3033);湖南省2015年普通高等学校教学改革研究项目(湘教通〔2015〕291号).湖南省2009 年教育厅科学研究项目(09C884);湖南省科技计划项目(2015GK2033)
林立(1972-),男,湖南武冈人,博士,教授,硕士研究生导师,从事电力电子与电力传动、新能源电动汽车及风力发电等方面的教学与科研工作
TM932
A
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27