基于 AMESim 对波浪控制平台电液伺服系统仿真与优化
2016-12-12 03:07:30佘建国邱广庭葛建飞
舰船科学技术 2016年11期
佘建国,邱广庭,葛建飞,陈 宁
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003;2. 江苏科技大学 能源与动力工程学院,江苏 镇江 212003)
基于 AMESim 对波浪控制平台电液伺服系统仿真与优化
佘建国1,邱广庭1,葛建飞1,陈 宁2
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003;2. 江苏科技大学 能源与动力工程学院,江苏 镇江 212003)
以荷兰某公司设计的波浪控制平台为研究对象,对其主要的液压元件添加传递函数,并建立电液伺服控制系统传递函数方块图。然后通过 AMESIM 仿真平台建立液压系统模型,探索在不同伺服增益参数时系统的动态误差。仿真结果显示,只通过改变伺服增益,系统不能满足实际精度要求。为此,本文在控制系统中采用 PD 控制算法,借助 AMEsim 中的遗传算法进行优化,得到最优 Kp和 Kd参数。结果表明,此方法能使系统实现所需精度及稳定性要求。
AMESIM;液压伺服系统;动态性能
0 引 言
随着综合国力增强,我国越来越重视对海洋的开发。据资料显示,世界海底石油可采储量约占总可采储量的 45%,海底天然气的储量约占总储量的50%~55%;在海底还蕴藏着如煤矿、铁矿、热液矿藏、可燃冰等丰富的矿产资源。在我国东海和南海发现了可燃冰,据测算仅我国南海的可燃冰资源就达700 t 油当量,相当于中国陆上油气资源量总数的1/2[1]。在众多的海上工程实施中,运输起吊工作成了一个极具挑战性的问题。主要是由于海面天气情况比较复杂,海面上浮式起重机的吊钩进行起吊重物,时常会受到波浪的作用而产生晃动,当吊钩的晃动超过一定的范围就会造成施工事故[2 – 3]。为了提高施工效率,有效克服海上浮式起重机在作业时所受波浪影响,荷兰 barge master 公司设计了1套三自由度波浪补偿控制平台。本文以此为研究对象,对其主要的液压
元件添加传递函数,建立液压系统模型,在控制系统中应用 PD 控制算法。传递表明此方法能使系统实现所需精度及稳定性要求。
1 电液伺服控制系统
船舶在海面上航行所受的波浪一般可分为6个自由度。如图1所示,分别为横摇、纵摇、首摇、横荡、纵荡、垂荡。其中的横荡、纵荡与首摇可以借助船舶动力定位系统或者锚泊技术来实现控制补偿,但是对于横摇、纵摇以及垂荡依靠船舶自身很难实现有效补偿,并且起吊机在作业过程中许多的施工事故都是由于这3种自由度运动所造成,鉴于此所设计的波浪补偿控制平台(见图 2),主要是为了实现对横摇、纵摇以及垂荡的补偿。
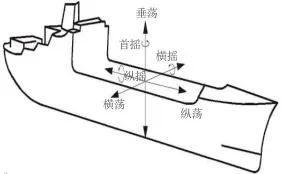
图1 船舶6个自由度运动Fig.1The ship’s motion of six freedom degree

图2 三自由度波浪补偿控制平台结构Fig.2The structure of three degree freedom wave compensation platform
在实际操作过程中,由于浮式起重机起吊重物时易受风浪作用会产生较大的扭矩,因此不能采用电机驱动而选择液压驱动。此外,在液压缸上升及下降过程中,会经常出现振动、噪声、冲击、爬行等异常工作状态,这主要是由于液压传动介质具有流动性、压缩性、粘度等特性所造成[4],因此对液压缸的控制尤为需要。电液伺服系统结合电气和液压技术特点,可以实现对液压缸运动精确控制,因此对电液伺服控制系统的研究至关重要。
2 控制系统原理及传递函数建立
2.1 控制系统的组成与原理
波浪补偿控制系统由微机控制系统及闭环液压系统组成。微机控制系统主要包括上位机、CT 控制器和数据采集卡等。闭环液压系统由位置传感器、伺服比例放大器和液压伺服缸等组成。其工作原理如图3所示,上位机通过网络通讯将期望位置姿态信号传输给CT 控制器,CT 控制器通过位置的转换和解算,得到3 只液压伺服油缸所需的位移行程,通过数模转换装置将数字量转换到模拟器件,来控制伺服比例放大器及比例伺服阀,从而控制3只液压伺服油缸的行程,安装在液压伺服油缸上的位移传感器将位置反馈,与期望的位置进行比较,通过 PD 调节使误差控制在合理范围之内。
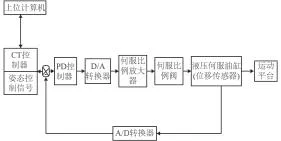
图3 控制系统的组成原理Fig.3The composition of control system
2.2 电液伺服系统数学模型
电液伺服系统具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参数的反馈等优点[5]。精确数学模型的建立对于实现电液伺服系统精确控制起着决定性作用。
液压缸连续性流量方程:

式中:Ql为负载流量,m3/s;Cie为等效泄漏系数,m5/N·s;PL为负载压力差,N/m2;Cf为附加泄漏系数,m5/N·s;Ps为液压油源的压强,Pa;Vt为液压缸等效总体积,m3;βe为系统有效弹性模量,Pa;Ap为活塞面积,m2;x 为活塞杆位移,m/s;。
电液伺服阀线性化流量方程:

式中:Kq为流量增益,m2/s;Kce为滑阀流量压力放大系数,m3/s·Pa;xv为滑块阀芯相对;Mt为活塞所承受重量,kg;Bp为活塞的阻尼系数,N/m·s–1;k 为负载弹簧刚度,m/s;FL为施加在活塞杆上的外力,N。
伺服控制系统主要以惯性负载为主,一般可以忽略弹性负载。因此对式(1)~式(3)进行拉斯变化,得到液压缸传递函数:

式中:ωh为液压固有频率,rad/s;ζh为液压阻尼比,量纲唯一。

系统液压固有频率高于 50 Hz 时,伺服阀的传递函数优选2介环节,其传递函数为:

式中:∆i 为差动电流;ksv为伺服阀增益;ωsv为伺服阀带宽;ζsv为伺服阀阻尼系数。
伺服放大器一般优选比例环节和位移传感器传递函数为:

式中:I 为放大器输出电流,A;Ka为伺服放大器增益,A/V;U 为伺服放大器输入电压,V。
位移传感器由于频宽比系统频宽高的多,因此一般采用比例环节,其传递函数为:

式中:Uf为位移反馈值,V;Kf为位移传感器增益参数,V/m。
电液伺服控制系统传递函数
由式 (4),式(7),式(8),式(9) 可以确定电液伺服控制系统的传递函数框图如图4所示。
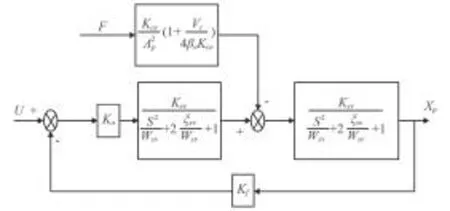
图4 控制系统方块图Fig.4Control system block diagram
3 AMEsim 建模和仿真
AMEsim 为多学科领域复杂系统建模仿真平台,用户可以在这单一平台上建立复杂的多学科领域系统模型,并在此基础上进行仿真计算和深入分析,也可以在这个平台上研究任何元件或系统的稳态和动态性能[6]。同时该软件具有强大的接口技术,可以与ADAMS、Matlab 以及其他工程软件进行联合仿真,使仿真工作范围更加宽广,仿真更加方便。
波浪补偿装置采用单通道控制策略,液压控制回路可以分为3个单通道回路,然后将3个单通道回路并联在一起,因此模型只需要建立一个单通道回路即可。图5为液压控制原理图,主要包括电动马达、液压泵、伺服阀、信号输出器、位移传感器、力传感器及伺服阀4的液压油流量,最终实现伺服缸的运动;在经过位移传感器将伺服缸位移值进行反馈。信号输出器8模拟施加在活塞杆上的负载。
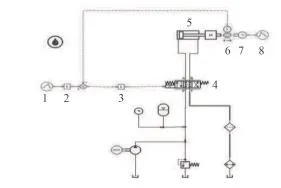
图5 液压控制原理图Fig.5Hydraulic control principle diagram
马达转速为1500 r/min;液压泵排量为35cc/rev,固有转速为1000 r/min;安全阀的流量压力梯度为500l/min,破裂压力为150bar;伺服阀额定电流为200mA,固有频率为50Hz,阻尼比为1null。液压缸活塞直径为35mm,液压杆活塞直径为25mm,连接质量块以及外部负载力设置为1000 kg。考虑到电液伺服阀几乎与二阶振动元件相似,伺服放大器的增益对整个控制系统的动态性能有着很大的影响。因此,首先在其他参数不变的情况下分别对伺服放大器设置不同的增益值[7],分别为 250,350,450。观察在不同增益参数时,系统的输出曲线与跟随曲线之间的误差。图 6~图9分别为AMEsim 环境下,仿真时间为12s,时间间隔为 0.05 s时的仿真曲线。
从图 6~图9的仿真结果可知,输出信号与液压缸的响应存在一定位置误差,这是所有的液压控制系统无法避免的,主要由于实际过程中必须将误差控制在满足要求的范围之内,本装置要求必须将误差控制在30 mm 以内。从图 7~图8发现,当增益因子从250增加到350时,系统的最大动态位置误差从 0.054 m 减少
到 0.038 m。这表明通过增加开环增益可以有效减少系统动态位置误差,当开环增益从350增加到450时,系统的动态误差减少到 0.0286m,但控制系统变得不稳定,因此对于仅仅通过增加开环增益并不能获得理想结果。从仿真结果中得知系统的动态位置误差与伺服放大器的开环增益成反比。

图6 不同增益参数的位移输出曲线Fig.6Displacement output curve under different different gain parameters
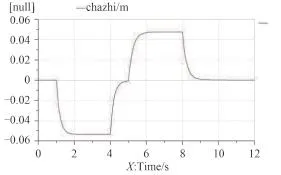
图7 增益参数250的动态误差Fig.7Dynamic error of gain parameter 250
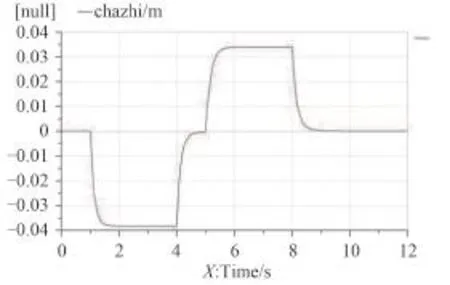
图8 增益参数350的动态误差Fig.8Dynamic error of gain parameter 350

图9 增益参数450的动态误差Fig.9Dynamic error of gain parameter 450
4 液压系统建模优化
从以上仿真研究可知,仅通过改变增益参数并不能取得理想的精度及稳定性要求。在 AMESim 软件中拥有特殊的 PD 控制模块,其主要基于 NLPQL 和遗传算法2种优化方法。NLPQL 主要思想是假设目标函数连续并且可微,将目标函数转化成二阶拉斯方程,将迭代点 X(k)作为二次规划子问题[8],根据迭代公式进行唯一搜索,使趋近于最优解 X。遗传算法是一种模拟达尔文自然选择和孟德尔生物进化理论的计算模型。其思想来源于生物遗传学中的优胜劣汰,它将问题转化为二进制码和基因,假设个体中染色体上的基因进行选择、交叉、变异等操作,产生新的个体。然后将适应能力强的个体保存下来,淘汰适应能力差的个体,经过多次反复操作,直到寻找出最优的个体[9]。
基于以上2种优化方法,在 AMESIM 仿真平台上选择遗传算法对 PD 控制器的2个参数进行优化。首先确认参数范围,应用 AMESIM 批量处理功能对电液伺服位置系统 PD 控制器的 Kp和 Kd参数批量处理,观察对输出响应的活塞杆位移参数变化的影响,排除对动态跟踪误差参数太大的和稳定性差的参数。批处理参数范围如下:
Kp取值范围:100,200,300,400,500,600,700,800;
Kd取值范围:0.01,0.05,0.1,1,5,50,100,200。
然后选择 AMESIM 中的 design 和 development 模块,采用遗传算法进行优化。为了避免选择参数过大,先将一部分参数处理得到大致的参数范围,然后再采用遗传算法进行优化设计,从而可以减少初始优化的盲目性,节省计算量。在 AMESIM 中设置算法参数,种群规模 40,复制概率为 0.7,变异概率为 0.1,变异幅值为 0.6,遗传迭代数为 50,超过接近4000 次迭代运算。得出最优的 Kp和 Kd参数为:Kp= 525.21,Kd= 0.04。
按照图10的优化模型定义 Kp= 525.21,Kd= 0.04,其他元件参数与图5的参数设置一样,设置系统的仿真时间为12s,时间间隔为 0.05 s,图11为仿
真分析结果。
对比优化前与优化后的仿真曲线得知,通过增加 PD控制器,系统的精度及稳定性有了很大的改进,系统的动态位置误差减少到 0.0273m,该误差比在不采用PD 控制算法精度提高了 40%,且系统具有一定的稳定性。因此采用 PD 控制算法控制调节,系统具有良好的跟随特性,可以实现本装置的精度及稳定性要求。
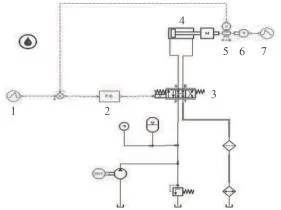
图10 优化后的液压控制原理图Fig.10After optimization of the hydraulic
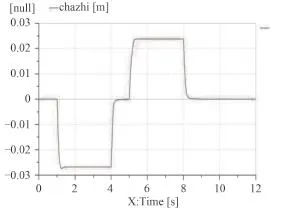
图11 在 PD 控制器下的动态误差Fig.11Dynamic error in PD controller control principle diagram
5 结 语
本文利用 AMESIM 建立波浪补偿控制平台液压图,分析不同开环增益下的系统动态性能,并提出了使用 PD 控制算法对液压控制系统进行优化,来满足系统精度要求。
1)从图 6~图9可知,可以通过增加伺服系统增益参数,来减少液压系统的动态位置误差,但随着伺服增益参数的增加,系统输出曲线开始不稳定,发生扰动,因此增加伺服增益参数在一定程度上可以实现提高精度。
2)基于遗传算法进行 PD 参数的优化选择,可以进行多个参数共同比较,过程简单,同时具有很好的收敛性,避免了盲目筛选参数从而提高工作效率。
3)经过图 10~图11的仿真研究,说明 PD 控制算法不但简单而且能够保证系统具有一定的精度及稳定性,能够使一个低稳定性的液压系统变为高稳定性,并且更好地跟随参考模型输出希望数值曲线。
[1]郑苗壮, 刘岩, 李明杰, 等. 我国海洋资源开发利用现状及发展趋势[J]. 海洋开发与管理, 2013(12): 13–16. ZHENG Miao-zhuang, LIU Yan, LI Ming-jie, et al. Current situation and trend of the development and utilization of marine resources in China[J]. Ocean Development and Management, 2013(12): 13–16.
[2]王孝霖, 顾含, 许历, 等. 波浪补偿起重机液压系统设计与分析[J]. 船舶标准化工程师, 2015(4): 63–66. WANG Xiao-lin, GU Han, XU Li, et al. Design and analysis of hydraulic system of wave compensation crane[J]. Ship Standardization Engineer, 2015(4): 63–66.
[3]王颖, 韩光, 张英香. 深海海洋工程装备技术发展现状及趋势[J]. 舰船科学技术, 2010, 32(10): 108–113, 124. WANG Ying, HAN Guang, ZHANG Ying-xiang. The development of deep water ocean engineering equipments and technology[J]. Ship Science and Technology, 2010, 32(10): 108–113, 124.
[4]王龙, 徐永宏, 周庆年. 液压爬行现象及其控制[J]. 液压气动与密封, 2010(11): 6–8. WANG Long, XU Yong-hong, ZHOU Qing-nian. The creeping phenomenon of hydraulic and the method to control[J]. Hydraulics Pneumatics & Seals, 2010(11): 6–8.
[5]YANADA H, FURUTA K. Adaptive control of an electrohydraulic servo system utilizing online estimate of its natural frequency[J]. Mechatronics, 2007, 17(6): 337–343.
[6]梁全, 苏齐莹. 液压系统AMESim计算机仿真指南[M]. 北京:机械工业出版社, 2014: 173–200. LIANG Quan, SU Qi-ying. Guide for computer simulation of hydraulic system AMESim[M]. Beijing: China Machine Press, 2014: 173–200.
[7]黄元峰, 刘源, 谈宏华. 电液伺服系统的增益自适应滑模变结构控制[J]. 大连海事大学学报, 2008, 34(2): 73–78. HUANG Yuan-feng, LIU Yuan, TAN Hong-hua. Gain adaptive sliding mode variable structure control in electro-hydraulic servo system[J]. Journal of Dalian Maritime University, 2008, 34(2): 73–78.
[8]杨永锋, 任兴民, 秦卫阳, 等. 基于层次分析法的MDO算法性能评价[J]. 机械科学与技术, 2007, 26(1): 108–111. Yang Yong-feng, Ren Xing-min, Qin Wei-yang, et al. MDO algorithm performance evaluation based on analytic hierarchy process[J]. Mechanical Science and Technology, 2007, 26(1): 108–111.
[9]边霞, 米良. 遗传算法理论及其应用研究进展[J]. 计算机应用研究, 2010, 27(7): 2425–2429, 2434. BIAN Xia, MI Liang. Development on genetic algorithm theory and its applications[J]. Application Research of Computers, 2010, 27(7): 2425–2429, 2434.
Simulation and optimization of electro hydraulic servo system for wave control platform Based on AMESim
SHE Jian-guo1, QIU Guang-ting1, GE Jian-fei1, CHEN Ning2
(1. School of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 2. School of Energy and Power Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
This paper took the wave compdded the transfer function for the its Critical hydraulic components, establishing the transfer function of electro hydraulic servo control system.Then we established the Hydraulic system model using AMESIM and explored the dynamic error under different servo gain parameters. The simulation results show that the system cannot meet the actual accuracy requirements through changing the servo gain only. So, we adopted PD control algorithm in the control system. By means of genetic algorithm in AMEsim optimization, the optimal Kpand Kdparameters are obtained.The result indicates that the use of PD control algorithm can make the system achieving the requirements of accuracy and stability.
AMESIM;hydraulic servo system;dynamic performance
TH137.33
A
1672 – 7619(2016)11 – 0070 – 05
10.3404/j.issn.1672 – 7619.2016.11.014
2016 – 03 – 30;
2016 – 05 – 06
佘建国(1963 – ),男,硕士,教授,主要研究方向为机械结构学设计。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
学苑创造·A版(2022年4期)2022-06-18 11:22:44
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
专用汽车(2016年4期)2016-03-01 04:14:27
中国航海(2014年1期)2014-05-09 07:54:24